
地铁受电弓等效模型的半虚拟参数识别
2019-04-22 10:49钱清泉吴积钦徐可佳
铁道学报 2019年3期
钟 源, 钱清泉, 吴积钦, 徐可佳
(西南交通大学 电气工程学院, 四川 成都 610031)
受电弓与接触网系统是电气列车从牵引变电所获取电能的重要方式,其可靠性对列车的安全运行有着重要影响。但随着刚性接触网的广泛应用,刚性接触网与受电弓的可靠性问题逐渐暴露,出现接触线与受电弓滑板的过量磨耗、接触网槽钢底座爆裂[1]、受电弓框架裂纹[2]等问题。在高速运行时,受电弓与刚性接触网之间还存在共振现象[3]。曾发现某地铁受电弓上框架尾端有刮蹭痕迹,见图 1。针对上述问题,准确完备的受电弓模型必不可少。

归算质量模型是常用的受电弓动力学模型,其准确性得到工程界的广泛认可[4],即使部分研究使用受电弓弹性模型,但依然将框架等效为归算质量模型[5]。受电弓的归算质量模型一般参考结构中弹性元件的使用情况建立,当滑板、弓头托架、框架间都通过弹簧机构相连时,受电弓可等效为三质量模型[6-9]。考虑受电弓上下臂杆在运动中存在相位差,因此框架进一步划分为两个独立的归算质量[10]。文献[11-13]将受电弓弓头拆除,利用附加弹簧和能量守恒定律得到受电弓框架的双质量模型,进而建立受电弓的三质量模型。但所得受电弓模型均缺少文献[4]规定的空气动力、质量块间干摩擦力、位移限制等参数。此外,由于质量块定义模糊,无法通过弓网仿真确认受电弓运行时的关键部件的运动轨迹。
为此,本文优化受电弓建模过程,借助实体模型模态分析结果,结合实际测量与空气动力学仿真计算,获得包含等效质量、刚度、阻尼、限位、空气动力、内部摩擦力参数的受电弓归算质量模型。
1 建模方法
受电弓建模基本流程见图2。首先利用有限元软件计算得到目标受电弓的大致模态,根据模态分析结果与实际需求,确认模型所需的自由度及其代表范围与测试点,然后分别通过试验与仿真计算获得模型的等效质量、刚度、阻尼、摩擦力以及气动抬升力系数。

1.1 模态分析
受电弓模态分析结果是建模的基础,可利用有限元法计算得到。模态分析需首先建立受电弓实体模型。为了简化模态计算,空气回路、电连接、螺栓等非必要结构可以忽略,保留受电弓弓头、框架及底架等主要结构。材料参数、连接设置、单元类型都会影响计算的结果。
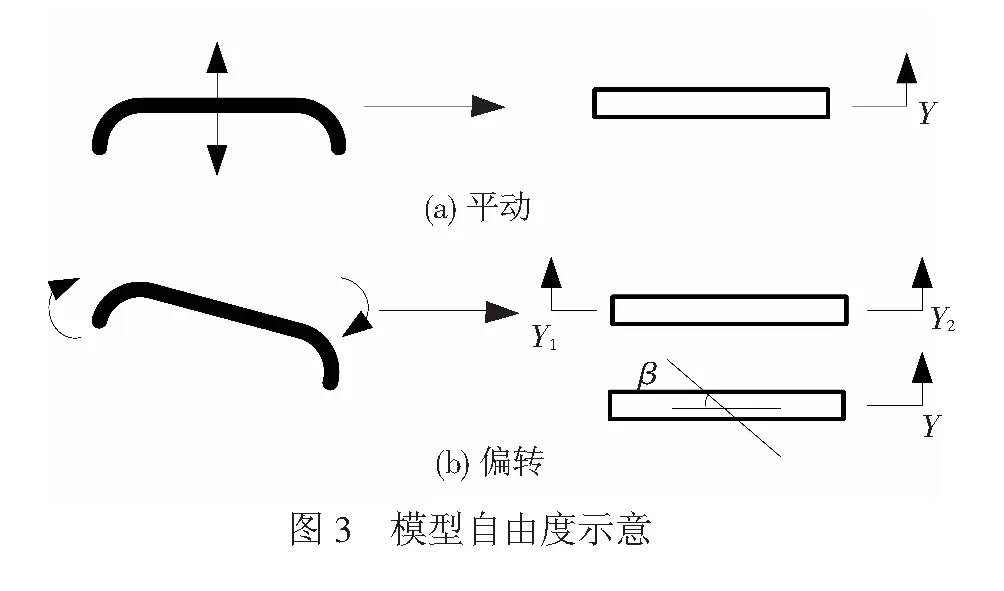
模态分析结果是为了寻找受电弓关注模态振型,确认归算质量模型自由度。受电弓归算质量模型通常只反映垂向的运动情况,因此横向、纵向的平动可以忽略。平动可以用单自由度表示,而偏转与滚动则需要两个自由度进行表示,既可以表示为两个平动自由度,也可表示为一个平动自由度和一个转动自由度,见图 3。在低频振动时,受电弓弓头的垂向振动、纵向偏转和侧向滚动,框架的扭转及杆件垂向变形等都可由归算质量模型表示。
在任一模态下,受电弓各部分的运动会存在相位差。相位差为0的部分可以视为一个自由度。对第i阶模态,抽取其关注的自由度,记为
Xi=Y1,…,Yn,βn+1,…,βm
( 1 )
式中:Xi为第i阶关注的自由度的集合;Y1,…,Yn为n个平动自由度;βn+1,…,βm为m-n+1个旋转自由度。
最终的受电弓模型自由度是所有关注模态下的自由度,即
X=X1∪X2∪…∪Xj
( 2 )
在得到模型自由度的同时,确定其代表的部分及用于后续测量和计算的特征点。每一自由度对应的部分内,其运动相位应保证相同。特征点宜选取对应该部分的质心。根据特征点的运动轨迹,可以判断受电弓各部位的运动情况,进而判断是否超过限位。
1.2 等效质量、刚度和阻尼
受电弓运动中,弓头的水平运动轨迹被限制在一个很小的范围之内,可以近似认为受电弓弓头的运动轨迹为垂直上下。因此在任一高度下,受电弓工作状态唯一。当框架上任意一点位置确定时,受电弓形态可以确定。
假设受电弓以某一工作高度运行时,形态不发生改变,那么受电弓可等效为线性系统。这个系统具有从所有关注模态抽取的j个自由度,其动力学方程
( 3 )
式中:M、J分别为质量和转动惯量矩阵;C、Cz分别为阻尼和转动阻尼矩阵;K、Kz分别为刚度和转动刚度矩阵;Y为位移向量;β为角度向量。
将位移向量Y和角度向量β中元素依照其关系分割整个系统为若干个单自由度系统,分别识别每个单自由度系统参数。接着将系统重新分割,消去已识别的自由度,识别新的单自由度系统参数。最后联立方程可以解得整个多自由度系统的参数。
固定特征点是消去自由度最简单的手段。以具有3个平动自由度的受电弓三质量模型为例进行过程说明。3个自由度模型的动力学方程为
k1y1(t)-k1y2(t)=0
( 4 )
k1+k2y2(t)-k1y1(t)-k2y3(t)=0
( 5 )
k2+k3y3(t)-k2y2(t)=0
( 6 )
式中:y1、y2、y3分别为弓头、上框架和下框架的位移;m1、c1、k1、m2、c2、k2和m3、c3、k3分别为弓头部分、上框架和下框架的等效质量、 等效阻尼和等效刚度。
当固定特征点2,即y2(t)≡0,式( 4 )与式( 6 )可写为
( 7 )
k2+k3y3(t)=0
( 8 )
如果将式( 8 )中(c2+c3)与(k2+k3)分别视为一个新的阻尼c′与刚度k′,式( 8 )可以写为
( 9 )
式( 7 )、式( 9 )是典型的单自由度系统的动力学方程。此时,弓头与框架可以视为两个独立的单自由系统。单自由度系统的等效参数(质量、阻尼和刚度)可通过施加外部激励,测量特征点的位移响应获得。
同理 ,固定特征点1和3,使y1(t)≡y3(t)≡0,可获得由(k1+k2)和(c1+c2)组成的单自由度系统,进而测量得到其等效参数。
将测量得到的每一个单自由度系统的刚度和阻尼联立方程,可以解得模型中所有的等效质量mj、刚度kj与阻尼cj。
1.3 气动抬升力
受电弓归算质量模型通常只考虑垂向运动。在模态分析结果上,可以确认每一自由度所代表的部分,进而可以计算得到每一部分的气动抬升力。将每一部分气动抬升力加载到对应质量块上,可以评价空气动力对各部分的影响。地铁弓网系统研究常忽视受电弓气动力的影响[14],但随着地铁运行速度的提高,空气动力的影响越来越大。
假设受电弓周围环境为定常流状态,受电弓每一部分的气动抬升力可以表示为
(10)
式中:Fay,i为受电弓某处气动抬升力;Fpy,i,Fτy,i分别为该部分空气压力差与摩擦力在垂向上的投影;pby,i为该部分表面压力在垂向的分量;τy,i为表面的黏性切应力τ在垂向的投影;SF,i为受电弓每一部分外面面积。
定义无量纲系数Cay,i,受电弓气动抬升力也可以写为
(11)
式中:Sy,i为受电弓某处的水平投影面积;ρ为流体介质的密度;Vt是受电弓相对空气场速度,即列车运行速度。
令受电弓每一部分气动抬升力系数为
(12)
那么,式(11)可表示为
(13)
当受电弓工作高度不变时,每一部分投影面积不变。若空气密度恒定,那么气动抬升力系数kay,i为恒定值,即气动抬升力与运行速度的二次方呈正比。
由于受电弓框架是连杆机构,弓头处产生的垂向力是各杆件在气动阻力和气动抬升力共同作用产生的。文献[15]指出高铁受电弓水平方向气动阻力对垂向弓网动态影响不大,可只考虑气动抬升力的加载。地铁受电弓工作高度更低,气动阻力对垂向运动的影响更小,本文只考虑气动升力对弓网接触力的影响。
各部分的气动抬升力可以根据受电弓工作环境,设置合理的边界条件,通过运用计算流体力学(CFD)方法计算得到数值解。不同速度下的气动抬升力计算结果与式(13)拟合获得其气动抬升系数。受电弓在开口和闭口方向运行时,各部分的受力情况不同,需要分别进行计算。
1.4 内部摩擦力
通常受电弓整弓的内部摩擦力在5~10 N之间。受电弓内部摩擦力主要存在于活动的机构间,例如轴承、转轴等。
摩擦力只考虑影响受电弓模型自由度方向运动的部分。当模型各部分间没有自由度方向相对运动的结构,可以认为其间摩擦力为0。
摩擦力与受电弓载荷和轴承内部面积、润滑有关。当摩擦力变化极小时,摩擦力可以表示为
Fr=Frsgny
(14)
摩擦力方向始终与运动方向相反。强迫目标件进行自由度方向的往复运动,驱动力的变化迟滞回线见图 4。
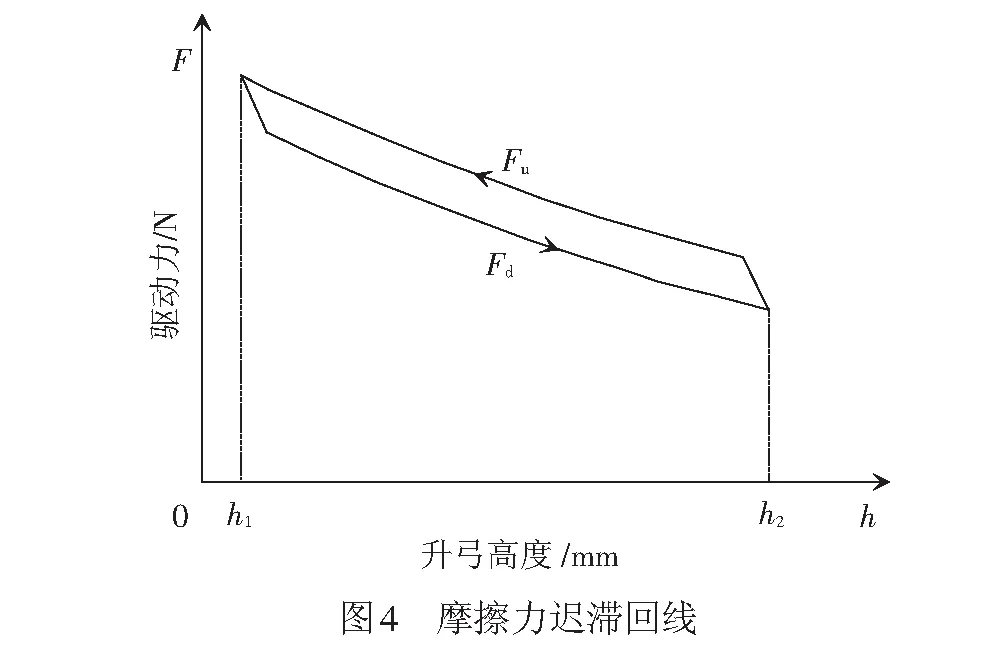
曲线间面积为摩擦力的功,内部摩擦力表达式为
(15)
式中:Fu、Fd分别为正向与反向匀速运动时的驱动力;h为受电弓工作高度;h1、h2为测量范围。
1.5 模型验证
受电弓的视在质量是评价受电弓动态性能的重要指标。将受电弓视为一个弹性系统,在弓网接触点受电弓可以等效为频率相关的视在质量,表示为
(16)

通过在滑板上施加激励,模拟弓网接触力,根据测量得到的激励力与加速度,可以计算得到受电弓在弓网接触点的视在质量为
(17)

对受电弓模型,假设激励力为Fcsinωt,仿真试验过程,同样可以根据式(17)计算得到受电弓的视在质量。
当弓头受到接触力作用时,其动力学方程为
(18)

式(18)可进一步简化为

(19)

设置初始值和容许误差,利用微分方程求解器求解式(19)得到位移Y,进而依照式(17)得到模型的视在质量。
通过比较实际测量和模型的视在质量,可以验证建模方法的准确性。
2 实例分析
本文以某型DC1.5 kV受电弓为例,对建模方法进行验证。
试验受电弓为双滑板单臂受电弓。两个滑板直接固定在同一弓头托架上。弓头托架间通过橡胶弹簧与弓头转轴相连。框架结构与尺寸与干线受电弓近似,上框架长2.3 m,下框架长1.67 m,拉杆长1.17 m。弓头质量为13.4 kg。气囊控制受电弓升降。
2.1 建模过程
首先,利用CATIA软件绘制该受电弓的简化三维模型。模型中忽略升弓装置,以及螺栓、气路及电连接等细节。

使用有限元软件ABAQUS对受电弓进行初步模态分析:模型采用壳单元,利用Lanczos算法求解器。计算结果的前6阶模态见图 5。受电弓的第1、第2和第5阶模态振型主要表现为弓头的运动垂向、横向振动和纵向偏转;第3和第4阶模态振型主要为上框架尾端的垂向振动和摆动;第6阶振型主要为弓头转轴的垂向运动。
受电弓在弓网动态仿真关注垂向运动。为此,只考虑第1阶、第3阶与第6阶固有频率下的振动情况,第1阶模态中,弓头及框架同步向下运动;第3阶模态中,弓头向上运动,上下框架连结处向下运动,选择弓头、上框架尾部两个自由度;第6阶模态中,弓头转轴周围部分向下运动,其余部分几乎不动,可分别视为一个自由度。上述模态振型下的自由度见表1。
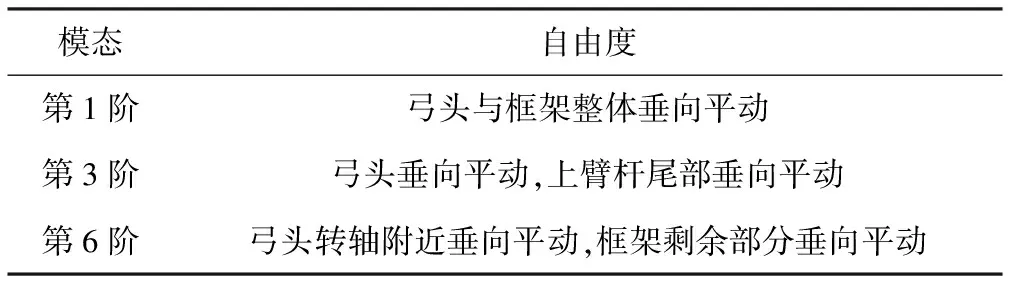
表1 第1、第3和第6阶模态下的自由度
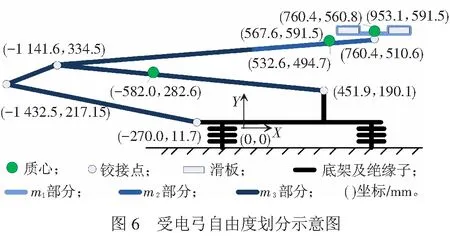
根据式( 2 ),该受电弓模型应有3个自由度(归算质量),分别为弓头、上框架上部和框架剩余部分,记为m1、m2、m3部分,见图 6。在实体模型中可以得到m1、m2、m3部分的质心坐标,以质心作为特征点。各部分特征点不在同一垂线上,因此归算质量间可以产生干涉,同时也可以根据几何关系确定其限位。根据坐标可以计算出m1、m2、m3部分特征点间的垂向距离,分别为66.1、212.1 mm。考虑到测量方便,选择滑板中心a、弓头转轴轴心b和上下框架连接c处作为测量点,见图 7。测量点与特征点符合连杆几何参数关系,可以根据图6中坐标计算得到。

接着依照1.2节过程,分别固定a、c与b点,通过测量特定载荷下位移计算得到对应刚度,利用自由振动衰减法得到等效质量和阻尼。试验中,测量点位移利用图像识别技术实现非接触式测量。测量精度可达0.09 mm,采样率500 Hz。
本例采用FLUENT流场计算软件,计算受电弓模型各部分的空气动力。为了简化计算,仿真模型忽略弹簧、电连接、气路等结构,填补了孔洞和沟槽。流体计算域参照盾构法隧道情况建立,隧道截面半径2.6 m,车顶平台高度3.85 m,忽略车顶下部空间和刚性接触网。参考文献[16],定义受电弓表面为三角形网格,流体场为四面体网格,受电弓表面网格尺寸为0.001 m,流体场速度出入口网格为0.1 m。设定侧面为对称边界条件,受电弓表面、车顶表面、隧道壁表面设为无滑移的壁面边界,出口设置为压力出口边界,入口设为速度入口边界。最终网格划分结果见图 8,网络总数256 685,平均质量0.76。

受电弓周围空气场视为定常、等温、不可压缩的三维流场,因此采用k-ε法进行求解。计算在大约250步后收敛。每一部分气动抬升力在开口、闭口方向随速度变化的计算结果见图 9。利用最小二乘法拟合式(13),得到开口方向与闭口方向的气动抬升力系数,kay,1、kay,2和kay,3,见表2,拟合误差小于0.3%。

在a、b点间,只有弓头转轴是可转动的,但其转动阻力并不影响垂向运动,因此可认为a、b点间摩擦力为0,即Fr,1=0。在b、c点间无活动结构,因此其间摩擦力为0,即Fr,2=0。当只有c点活动时,框架内部数个铰接都会随之运动,因此只有Fr,3≠0。这样只需测量整弓的内部摩擦力就可以得到Fr,3。

表2 受电弓模型参数表
整弓的内部摩擦力在接触力测量试验装置上进行测定。将受电弓升起,控制试验装置使受电弓在刚性接触网下的工作高度附近匀速上下运动,记录受电弓上方压力传感器读数。根据式(15)计算得到整弓内部摩擦力为4.3 N。
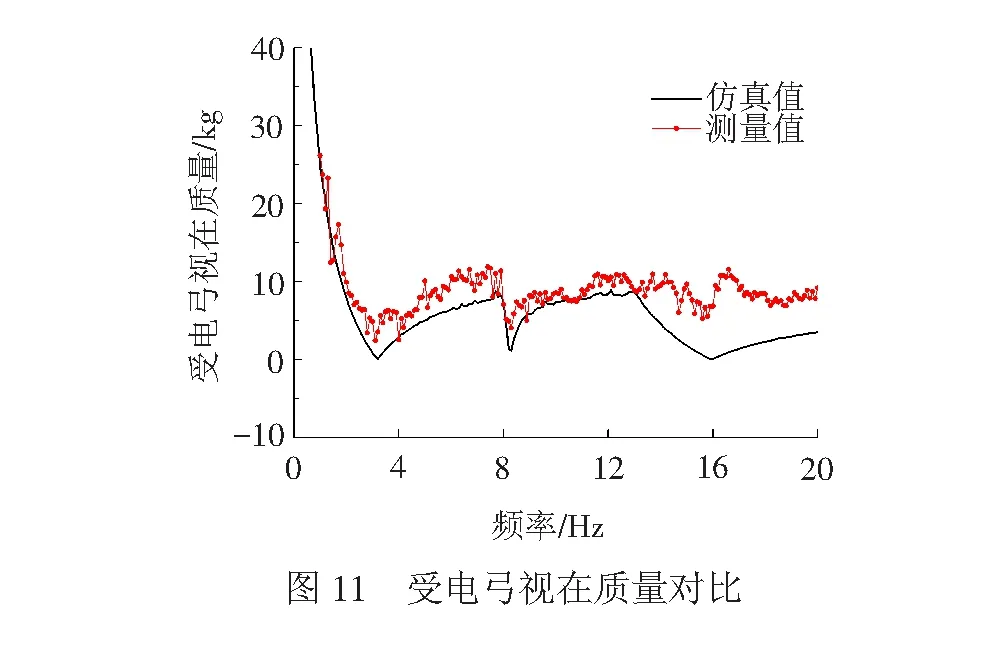
最终测试受电弓的模型见图 10,参数见表 2。

2.2 模型校验
视在质量的测量在弓网接触力测量试验装置上进行。调整激振器平台高度使试验受电弓位于工作高度(240 mm)并调整静态接触力为100 N。利用试验台在受电弓弓头滑板中心施加位移激励,通过安装在受电弓滑板上方的压力传感器和贴在弓头滑板上的加速度传感器获得弓网接触点的激励力和加速度。同时,采用工业相机记录a、b、c的位移。
力传感器采用interface生产的桥式称重传感器,非线性度0.05% FS,迟滞系数0.05% FS,非重复性0.03% FS,额定输出2.0 mV/V,固有频率3 000 Hz。加速度传感器采用Bruel&Kjaer生产的压电式CCLD加速度计,灵敏度为100 mV/(m·s2),适用频率0.4~6 000 Hz。采集系统选用NI CompactDAQ搭配NI-9237和NI-9234,采样率5k。当静态升弓力为100 N时,测试受电弓视在质量的模型计算结果与实际测试结果见图 11。可以看出,频率在13 Hz以下时,二者视在质量差别很小,受电弓归算质量模型能较好的反映真实受电弓的动态特性。但随着频率的升高,二者之差逐渐增大。
2.3 分析
模型的动态响应与实际受电弓依然存在一定的误差。误差主要来自未考虑的模态,如第4阶、第6阶。模型可以反映视在质量曲线在16 Hz附近的回落,但限制于模型自由度,17 Hz附近的增长却有所缺失。可以推断当关注更多模态并采用更多自由度建模时,受电弓归算质量模型依然可以反映受电弓动态特征。
此外,建立此模型时假设运行中受电弓形态不改变。而在实际运行中,受电弓形态会有小幅的改变,导致参数非线性变化。这也是产生误差的原因之一。
通常,弓头质量依照1∶1代入归算质量模型,但可以看到本例中这一系数仅为0.65。将测量结果代入式(16),弓头部分归算系数更小。这是由于干线受电弓多采用较为轻型的铝合金弓角,质点更接近弓网接触点,以1∶1归算时误差较小。而地铁直流受电弓多采用不锈钢弓角,导致质量更加远离弓网接触点,以1∶1归算时有较大误差。
从所测的模型参数来看,地铁DC1.5 kV受电弓弓头悬架刚度远大于普通干线受电弓。这是由于DC1.5 kV系统中,受电弓载流量大,需要配备更大的滑板,导致弓头质量大,需要刚度更大的弓头悬架去支撑。但另一方面,由于地铁净空小,受电弓工作高度往往更低。工作时,上臂杆几乎水平,其力学模型更近似于梁结构而非杆结构。这导致地铁受电弓上臂杆刚度小,甚至小于弓头悬架刚度。在正常工作时,上框架振动更为剧烈,也更易出现结构的损伤。为此,有必要减轻弓头重量、减小弓头悬架刚度。考虑到目前地铁大规模使用刚性接触网,弓角在正线几乎无用,建议使用更为轻量化的材料和结构以减轻弓头重量。
根据模型参数可以计算得到试验受电弓的固有频率分别为3.1、8.2、15.8 Hz。受电弓在刚性接触网下运行时,假设刚性接触网跨距为8 m,弓网系统的主导频率达到3.1 Hz时的列车运行速度为89.3 km/h;跨距为6 m时,这个数值仅为66.9 km/h。考虑到刚性接触网1阶模态频率在2.48 ~ 2.67 Hz附近[17],文献[3]所述的弓网系统共振极有可能发生。这对受电弓结构和弓网系统可靠性都是极大的危害,系统设计时应当重视。
在第1阶模态下,弓头(m1部分)与下框架(m3部分)反向振动,特征点位移之差可达到最大。当受电弓静态接触力为100 N时,若取接触力变化为0.6倍静态接触力[3],即Fc= 60 N。列车在受电弓闭口方向以80 km/h运行时,利用所得模型参数,根据式(19)求解得到m1部分与m3部分特征点位移之差为154.7 mm。根据图 6几何关系计算可知,受电弓尾部表面至滑板表面垂向距离仅约73 mm。考虑滑板磨损、列车车体振动等因素,在极端情况下,受电弓上框架尾端与刚性接触网出现刮蹭是极有可能的。这解释了出现图1中刮蹭现象的原因。
3 结论
(1) 利用初步的模态分析结果,有针对性的选择归算模型自由度,划分其代表部分,不仅可简化受电弓的建模过程,还可获得限位、气动抬升力等信息,所得的三质量模型可以准确地反映受电弓的在13 Hz以下时动态响应情况。
(2) 与干线受电弓不同,地铁受电弓三质量模型中,弓头质量归算系数小于1,弓头悬挂刚度大且上框架刚度小,这会影响地铁受电弓的结构可靠性。
(3) 在刚性接触网下运行时,弓网系统主导频率接近受电弓和刚性接触网的1阶固有频率,极有可能造成弓网系统共振,影响系统可靠性。在极端情况下,还有可能造成受电弓弓尾与接触线的刮蹭。
(4) 由于实体模型参数很难准确设置,所得模型模态振型与初步实体模型计算结果差别较大,因此需利用试验台进行动态参数测量。后期研究若能将此部分在软件内实现,将大大有助于受电弓的设计与开发。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
信息记录材料(2022年3期)2022-05-17
铁道机车车辆(2022年1期)2022-03-24
轨道交通装备与技术(2022年1期)2022-03-18
云南画报(2021年10期)2021-11-24
铁道机车车辆(2021年5期)2021-11-19
云南画报(2020年12期)2021-01-18
铁道学报(2020年8期)2020-09-07
哈尔滨铁道科技(2020年4期)2020-07-22
铁道建筑技术(2019年6期)2019-11-29
