
基于神经网络算法的可控电抗器谐波特性研究
2019-04-19 01:19程汉湘熊培枫夏健新
广东电力 2019年4期
程汉湘,熊培枫,夏健新
(广东技术师范大学天河学院,广东 广州 510540)
电能质量的快速发展,使电气设备从简单机械型过渡到了智能控制型。举个简单的例子,对于无功补偿而言,补偿设备已从最早的简单手动控制发展成现在的智能遥控,并能借助于通信网络与其他设备一起共同完成区域内的电压调控,或其他的电能质量控制。实际大量应用的可控电抗器主要是晶闸管控制电抗器(thyristor controlled reactor,TCR),以及磁阀式可控电抗器(magnetically controlled reactor,MCR)[1]。以下将简单介绍一下它们的工作原理,并对它们的特性进行比较。
1 电抗器的工作原理
1.1 TCR的工作原理
在TCR的整个调控过程中,电抗器的电感值始终保持不变,只是通过晶闸管控制角的变化来控制流过电抗器电流的导通时间,以实现对感性无功电流的控制,即实现对无功补偿量的控制。如果将固定容量的电抗器仅仅通过开关接入电网,或从电网切除,即开关只具有通断控制功能,这就是晶闸管投切电抗器(thyristor switched reactor,TSR)。
图1(a)所示为最基本的单相TCR的原理图,它由固定电感L(通常为空心电感)和双向晶闸管开关阀或开关电路组成。

(a) 主电路结构

(b) 正半波电流波形
(c) 负半波电流波形

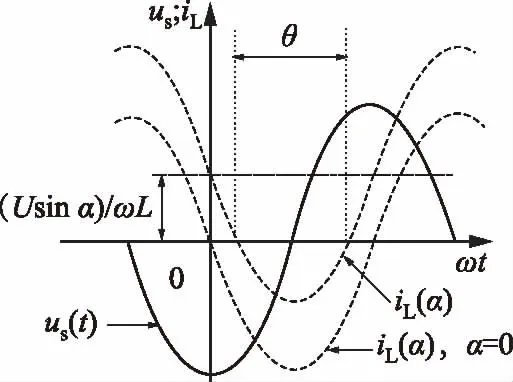
(d) 控制角连续变化时的等效基波电流波形us(t)—外施交流电压(电网电压)瞬时值;iL(α)—各次谐波电流瞬时值;U—电网电压的有效值;ω—电网电压的角频率;t—时间;α—晶闸管控制角;θ—导通角。图1 TCR的结构及电压、电流波形Fig.1 Structure of TCR and its voltage and current waveforms
在固定电压幅值的作用下,电抗器在任何瞬间都能通过开关阀实施触发导通控制;TCR则可利用触发脉冲的前后移动来控制流过电抗器的电流幅值和时间长短。根据电抗器的物理特性,电抗器电流相位滞后电抗器电压相位90°;因此,电抗器的开关阀控制角应该以电感电压最大值所处的时刻作为起始点,即以电抗器电压相位为90°时作为起始点或参考点。
由图1(d)中实线表示的iL(α)波形可知,通过改变控制角α,可控制电抗器中的电流幅值,使其由最大(α=0)到零(α=π/2)的连续变化。在图1(d)中还用虚线同时给出了不同控制角α对应基波电流分量iL1(α)的等效变化曲线[2]。TCR的基波电流IL1(α)和无功导纳BL(α)随控制角α变化可如下定义。

(1)
式中:Um为外加交流电压的幅值;BL(α)为电抗器的无功导纳;IL1(α)为基波电流幅值。
1.2 MCR的工作原理
MCR作为静止无功补偿装置(static var compensator,SVC)中的重要一员,具有很多实用优点,自2000年以来在我国得到了快速发展。MCR也是基于晶闸管开关的可控补偿器,它通过晶闸管控制将电抗器投入到电网,或从电网切出,以吸收可连续或阶跃调节的无功功率[3]。这种方法的实质就是一个可变的无功并联电抗,以满足传输电路的补偿需求,完成普通机械开关无法完成的工作。
在环形铁心电感中,且已知绕在铁心上的绕组匝数n、铁心的横截面积S、流过线圈的交流励磁电流I、通过铁心的磁通链Ψ、铁心中的磁感应强度矢量B、磁场强度矢量H、环形铁心的磁闭合路径长度l,同时还假设磁路的磁导率μ=μr×μ0(μr为磁路材质的相对磁导率,μ0为真空磁导率),则铁心中所对应的磁通势F、磁通链Ψ、磁阻Rm,以及电感L之间的静态关系可表示为

(2)
由于磁场强度矢量H与线路路径矢量一致,磁感应强度矢量B与铁心横截面的法线方向一致,所以式(2)中的Ψ和F以及下文中相关矢量可用标量来表示。在理想的并联电抗器中,磁通链的导数dΨ(t)/dt与电抗器电压u(t)是平衡的;因此,无论电抗器铁心中的其他参数如何变化,dΨ/dt=u(t)的关系必须保持恒定不变,前提条件是不考虑线圈的漏磁通和绕组电阻。在不考虑线圈损耗的前提下,线圈绕组中流过的励磁电流矢量就是纯电感电流矢量,而线圈电流的变化也相当于线圈所代表的电感量的变化;因此,在磁通链对时间的导数不变的前提下,只要能通过改变某个或者某些参数,使得流过线圈中的电流发生变化,就能均匀调节线圈对应的电感。
2 MCR磁特性分析
2.1 裂心磁路的磁特性
以上简单介绍了裂心式MCR的工作原理,现对单相裂心式MCR的结构进行分析。单相裂心式MCR绕有线圈的2个铁心柱中既有交流磁通,同时还有直流磁通。直流磁通在这2个铁心柱之间循环,而交流磁通在2个铁心中为同相磁通,它只可能经过第三条磁路形成闭合路径;因此,每个铁心中的合成磁通链Ψ为交流磁通链Ψac与直流磁通链Ψdc之和。如果忽略漏磁通的影响,则2个裂心柱磁通链的表达式分别为
(3)
式中:Ψ1为1、3绕组的磁通链;Ψ2为2、4绕组的磁通链;Ψdc为由直流偏磁电流幅值控制的直流磁通链;Ψac为幅值不能变化的交流磁通链,它的变化率必须与外施电压平衡,即dΨ1(t)/dt=dΨ2(t)/dt=dΨac(t)/dt=us(t)。
铁心材质的B-H特性不仅不是线性关系,而且还具有显著的磁滞特性,这就给磁路分析带来了很大的难度。在非线性磁滞分析中,一般采用图示法来定性说明(如图2所示);而在定量分析中,大多采用有限元的数值逼近法进行计算分析。本节主要是采用图示法进行说明。
在铁磁材质的偏磁研究范畴中,一般普遍接受图2(a)铁心材质在不同偏磁强度下的偏磁轨迹特性,图中最外围的近似菱形边框为磁滞回线可能的最大边界。
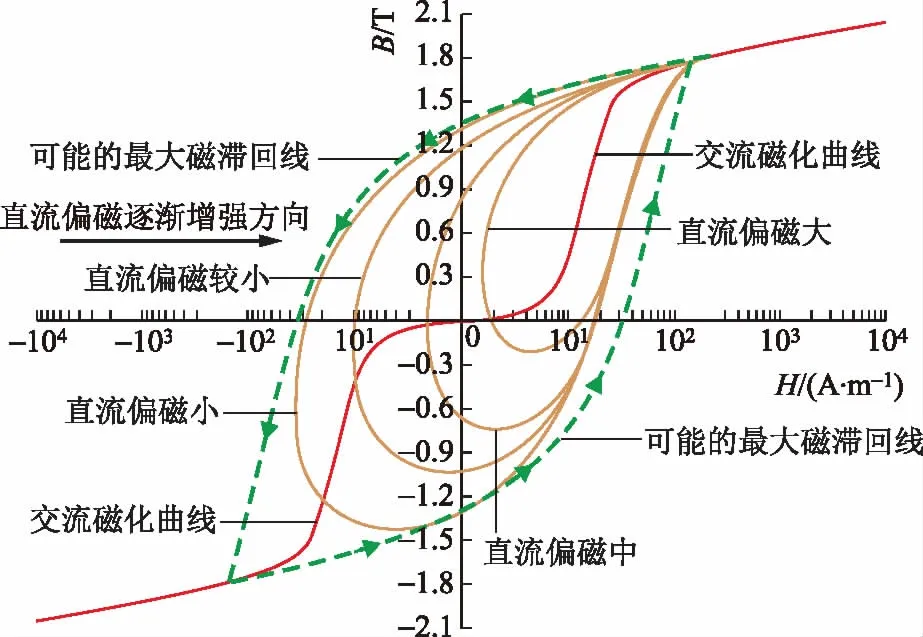
(a) B30G120交流磁化坐标中不同偏磁强度下可能的磁滞轨迹
(b) 某一偏磁强度下2个绕组电流(i1、i2)波形对比图2 裂心式MCR可能的偏磁轨迹Fig.2 Possible magnetic bias trajectory of split core MCR
当磁阀进入深度饱和状态时,一方面磁阻会迅速增加,电抗器的电流也会随之增加,对应的电抗值则迅速减小;另一方面,由于磁阀处的横截面较小,磁感应强度B会大幅增加,有一部分磁力线则通过磁阀附近的空气隙实现主体铁心的磁通链耦合。
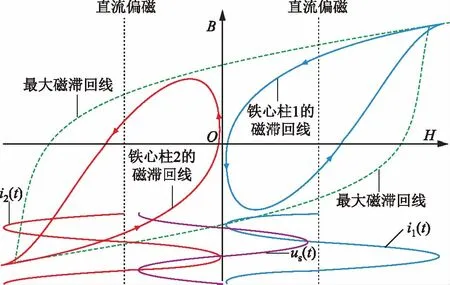
图3所示为控制电源问题的一种实际解决方案,该解决方案利用电抗器绕组的很少一部分(一般为电抗器单柱全部绕组匝数的1%~3%)作为单相整流电路的交流输入电源[4]。

L1至L4均为绕组;uL(t)、i(t)分别为绕组电压和流过绕组的电流,用下标1至4表示不同的绕组;T1至T2均为晶闸管;iT1(t)、iT2(t)分别为流过晶闸管1、2的电流;iDC1、iDC2分别为回路1、2的电流;uD(t)、iD(t)分别为二极管电压和流过二极管的电流;is(t)为外施交流电流。图3 裂心式MCR的电气连线Fig.3 Electrical connection of split core MCR
在图3中,晶闸管T1和T2交替导通,由此形成给电感器提供直流励磁的电源途径。
2.2 基于神经网络的偏磁特性拟合方法
根据上文可以清楚地认识到磁变量的求解是非常复杂的,虽然Preisach模型或JA模型都可成为解决偏磁曲线的理想方法,但用这2种模型进行偏磁特性计算不仅计算步骤非常繁琐,而且还涉及到许多参数的设定和优化。接下来将讲述一种基于反向传播(back propagation,BP)神经网络辨识的偏磁轨迹计算方法,在该方法中,所需给定的输入参数只需根据铁心材质生产厂家所提供的主要典型数据即可,而且还能考虑到上述所介绍的所有影响因子。其计算模型的合理性已在对400 V/20 kvar、10 kV/500 kvar、10 kV/5 Mvar以及35 kV/1.6 Mvar等参数的众多MCR的试验中得到证明,有些结果非常接近计算值,这中间的差别只是所选用磁质材料、绕组匝数、铁心柱横截面积、磁阀长度和磁阀铁心面积的不同而已。
神经网络的自学习功能如图4所示。
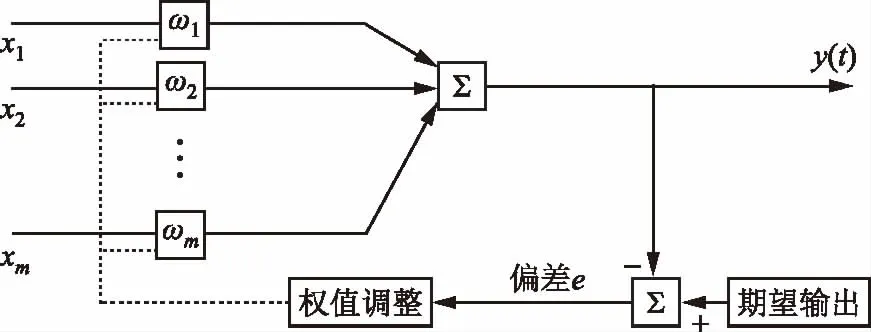
图4 神经网络的自学习功能示意图Fig.4 Schematic diagram of self-learning function of neural network
假设xi(i=1,2,…,m)为m个输入变量,每个输入变量经过权重ωi的加权后全部相加,形成输出变量y(t),即输出量y(t)与输入变量之间的关系为y(t)=∑ωixi。
一般而言,由于事先并不知道输出与各输入变量之间的实际关系,可能首先会随机选择一些初始权系数。根据给定的输入变量,系统就会产生一个对应的输出y(t)。这个输出是否满足要求,就必须根据在这些输入条件下已获取的试验结果或其他客观物理规律来决定,在图4中用“期望输出”模块来表示。刚开始时,输出结果与期望输出之间可能会存在较大的偏差e,系统会将该偏差传递到“权值调整”模块中,经该模块自学习过程的智能调整后,就会产生m个新的权重系数ωi,并对已有的权重系数进行更新,在同一输入条件下再观察输出结果是否满足相关要求。如果不满足,再重新进行分析和调整,直至满足要求为止。接着,再改变一组输入参数,重新进行完善和修改,并对输出结果与新的期望值进行比较分析,直至达到要求为止。当所有的输入序列(一般是持续一段时间的周期性变化,如数个正弦周期)都完成了,且每个对应的输出结果都符合要求,则最终所得到的权重集合ωi即为最终解的集合。
这个不断修改和完善权系数的过程称之为“训练”或“自学习”过程。训练过程的长短取决于对结果的精度要求,以及输入/输出关系的复杂性。一般而言,这个训练过程是非常长的,有时需要上万次,如果不进行优化处理,可能还达不到全局优化的目的,而只能达到局部最优;因此,合理地选择数值逼近的运算方法和优化步骤,是取得最优快速逼近的关键。
图5为磁滞模型的神经网络模拟系统,其中图5(a)所示为BP神经网络的拓扑结构[5-6]。在前向传递过程中,输入信号从输入层经隐含层逐层处理,直至输出层。每一层的神经元状态只影响下一层神经元状态。若输出层得不到期望输出,则转入误差e的BP。误差的BP是将输出误差e以某种形式通过隐含层向输入层逐层反传,并将误差e分摊给各层的所有单元,从而获得各层单元的误差信号,此误差信号即作为修正各单元权值的依据。这种信号正向传播与误差BP的各层权值调整过程会周而复始地进行。权值不断调整的过程(也就是网络的学习训练过程)会一直进行,使网络预测输出不断逼近期望输出。

(a) BP神经网络的一般性结构

(b) BP神经网络构成的磁滞模型ω1,ij—第i个输入层与第j个隐含层之间的权重;ω2,jk—第j个隐含层与第k个输出层之间的权重。图5 磁滞模型的神经网络模拟系统Fig.5 Simulation system of neural network for hysteresis model
将期望输出部分规定为试验结果的数据,即为在不同直流偏磁下所保存的绕组电流和电压。图5(b)为对应的神经网络结构,其输入向量由铁心中的磁感应强度B、铁心材质的磁感应强度最大值Bmax、铁心材质的矫顽磁力Hc以及控制直流偏磁大小的晶闸管控制角α组成。只要求得了铁心中的磁场强度H,就可以根据式(4)中B和H之间的关系得到相对磁导率,从而得到此路的磁阻Rm,然后就可以求得电路层面的各绕组电流。

(4)
式中Φ为磁通量。
因此,输出向量只需用磁场强度H表示即可。输入向量中的磁感应强度B与电网电压之间的关系为
(5)
式中B0为初始磁感应强度。
式(5)中的us(t)可近似认为是一个理想的正弦波。在稳态运行时B0实际上表示直流偏磁所产生的恒定直流分量Bdc,这个值只是在通过晶闸管控制角α的改变对偏磁量进行调节时,才会产生动态变化,其变化规律可近似用一阶微分方程所表示的指数规律来描述,但在稳态运行时也可以近似地用一个恒定值来表示;所以,输入向量中α实际上反映了直流偏磁的大小,它是控制可控电抗器等效电感的重要输入参数。输入向量中的Bmax和Hc基本规定了磁滞回线面积的大小,也规定了磁滞回线可能的最大运动轨迹范围。这2个输入参数实际上反映了不同铁心材质所具有的特性。隐含层的单元数一般为输入单元的1.2至1.5倍,也可以由下式来确定:
(6)
式中:a为0~10之间的常数;c为输出向量的单元数。前已述及,隐含层的单元数并不是唯一的,数值较大时,所得结果的精度会更高些[7]。为了满足某些特定要求,较大的K值所对应的鲁棒性也会更强,但计算速度会显著下降。从实用的角度出发,只要能保证足够的精度,隐含层的单元数越少越好。
事实上,图5(b)所对应的函数关系可以由H=f(B,Bmax,Hc,α)来表示,也可以认为它就是一个“黑盒子”,只是对“黑盒子”中的网络权值ω1,ij和ω2,jk采用了神经网络理论进行了迭代逼近。应该指出,随着控制角的逐渐减小,绕组电流便会快速增加,控制角对容量的控制会越来越灵敏[8-9],这与铁磁材料进入深度饱和区后所表现出的物理现象是一致的。
3 TCR与MCR的比较
TCR和MCR都是通过晶闸管的控制角变化来实现对等效电感的无级控制,从而达到无功补偿的控制目的[10],且两者的适用范围都是一样的;但无论是电气特性、制造成本,还是对电网产生的谐波污染[11],两者都具有显著的不同[12]。接下来在谐波和电气2个方面分别对TCR、MCR进行对比分析。
3.1 谐波的比较
对于MCR,因12脉冲或双负绕组的星形/三角连接方式抑制谐波的结构和原理是一样的,只能采用相同容量的单相和单个电抗器各自所产生的谐波幅值来比较两者谐波。在不同控制角的作用下,TCR的谐波可直接进行计算,但MCR的谐波则只能根据实际运行波形,然后再利用傅里叶级数展开的方式来计算,设计参数不同,对应的谐波也不一样[13-14]。因第2.2节的分析中所采用的磁滞模型与试验结果几乎完全一致,所以在以下谐波计算中采用上述相同的计算模型,只是在具体分析时运用100 kvar/400 V的电抗器作为分析对象。此外,TCR和MCR控制角的起点和有效范围均不相同,因此只能在相同补偿容量的前提下进行比较。
表1给出了某一实际MCR在设计参数下所得到的不同应用容量(Qn为额定容量)输出时相电流的主要谐波幅值,TCR的谐波幅值则是在相同设计容量下直接计算得到。由表1不难看出,在给定MCR设计参数和2种可控电抗器具有相同容量下,TCR在不同输出容量下的基波幅值均大于MCR的基波幅值。这意味着,尽管两者都产生谐波,且各次谐波幅值互有高低,但MCR的总谐波畸变率要大于TCR的总谐波畸变率。但这并不说明MCR所产生的谐波就一定比TCR的谐波大,因为通过磁阀结构的优化,可使MCR所产生的谐波得到极大的改善[15]。整体而言,2种可控电抗器的总谐波畸变率会随着输出容量的增加而逐渐减小;因此,在可能的情况下,应尽量使可控电抗器在较大容量下工作。
表2则反映了从10%~100%额定容量范围内控制角变化情况,它实际上间接给出了电抗器的控制灵敏度。在所给定的容量变化区间,TCR控制角的移动范围为53.8°,而MCR控制角的可移动范围为40°,显然,后者的灵敏度要高一些。总体来讲,2种可控电抗器的可控移动范围都比较大,灵敏度的相对高低不会对控制系统的稳定性产生显著影响[16]。
表1 不同输出容量下的电抗器相电流幅值(额定容量100 kvar、额定电压400 V)
Tab.1 Phase current amplitudes of reactors at different output capacities (100 kvar rated capacity and 400 V rated voltage)

电流分类电抗器不同输出容量时电抗器相电流幅值/A0.1Qn0.2Qn0.3Qn0.4Qn0.5Qn有效值MCR8.316.725.033.341.7TCR10.619.327.535.543.3基波MCR6.713.520.427.233.9TCR8.316.725.033.341.73次谐波MCR4.38.512.516.620.8TCR6.09.411.211.711.25次谐波MCR2.24.26.28.210.4TCR2.61.50.52.43.77次谐波MCR1.02.03.14.35.6TCR0.11.51.70.80.59次谐波MCRTCR0.50.71.10.41.80.72.61.23.40.7电流分类电抗器电抗器容量不同时相电流的幅值/A0.6Qn0.7Qn0.8Qn0.9QnQn有效值MCR50.058.366.775.083.3TCR51.259.167.175.183.3基波MCR41.148.555.462.169.0TCR50.058.466.775.083.33次谐波MCR24.728.432.436.540.5TCR10.08.15.93.305次谐波MCR12.013.415.317.819.8TCR4.34.13.21.907次谐波MCR6.26.97.99.510.6TCR1.62.22.01.309次谐波MCR3.73.84.45.15.6TCR0.21.01.31.00
表2 不同输出容量输出时的电抗器控制角
Tab.2 Control angles reactors at different output capacities
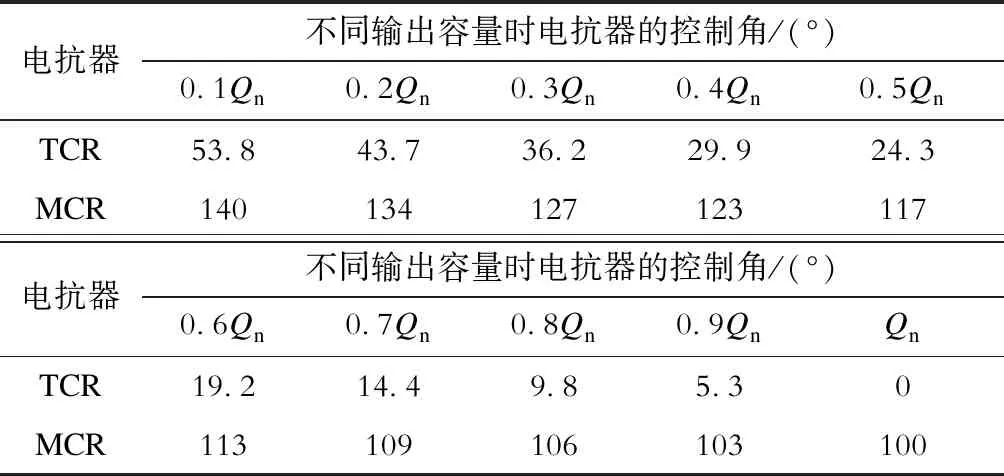
电抗器不同输出容量时电抗器的控制角/(°)0.1Qn0.2Qn0.3Qn0.4Qn0.5QnTCR53.843.736.229.924.3MCR140134127123117电抗器不同输出容量时电抗器的控制角/(°)0.6Qn0.7Qn0.8Qn0.9QnQnTCR19.214.49.85.30MCR113109106103100
3.2 电气特性的比较
上文对TCR、MCR的谐波进行了比较,接下来对电气特性对比分析。相对于MCR而言,TCR的最大优越性在于它的动态响应速度远高于MCR。由于三相TCR的触发控制仍然是每隔60°一次,最坏的情况是在控制角α=0°(TSR状态)稳态运行时立即转入空载,即下一脉冲输出的控制角α=90°,对于下一个可控输出脉冲的触发时刻而言,这相当于滞后了150°(即90°+60°)才能得到实际控制。若电网系统工作频率为50 Hz,则相当于滞后了8.33 ms,这种滞后在大多数实际应用中都是允许的,也是非常快的。
通过以上TCR和MCR的对比,再根据前面介绍的MCR工作原理可知:MCR的动态响应速度虽然也是通过迅速增加控制角来实现空载,或通过迅速减小控制角来快速提升吸收容量,但MCR的电感通常都比较大,且绕组导线电阻相对又比较小;因此,无论电感电流的上升或下降,时间常数都很大,一般也难于实现快速的控制输出[17]。
欲解决MCR的响应速度,一般都是从电流上升或下降的时间常数τ=L/R入手,一种方法是在加速时间内快速减小电感量L,另一种方法是快速增大回路电阻R。对于固定整流偏磁电压而言,快速提升电流和快速减小电流的时间常数控制策略是不一样的。自2010年以来的研究表明:只要快速增加强励偏磁,就能快速提升吸收容量,目前最快的电流上升时间已提高到30 ms;当然,在偏磁回路中增加一个大电阻也能使MCR快速实现由满载到空载运行,这个电流的下降时间完全可以控制在30 ms以内。事实上,要解决MCR的响应速度的方法是很多的,关键是所采取的措施在动态控制过程中应能保证系统运行的稳定性和可靠性[18-19]。
4 结束语
电力系统的稳定性要求控制设备不应有太大的动作从而引起系统的波动,而MCR是基本上工作在非线性条件的铁心电抗器。为此本文采用神经网络算法进行动态控制,使得MCR的控制精度更高,平滑性也更好,得到的实验结果与实际应用效果基本相同。此类MCR已应用在10 kV和35 kV的光伏和普通变电站当中,有明显效果。
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
电力设备管理(2022年3期)2022-03-18
综合智慧能源(2020年6期)2020-06-30
弹箭与制导学报(2018年1期)2018-11-13
通信电源技术(2018年5期)2018-08-23
黑龙江电力(2017年1期)2017-05-17
哈尔滨理工大学学报(2016年3期)2016-11-05
电测与仪表(2016年3期)2016-04-12
