
基于元胞自动机的绿色驾驶行为特征仿真
2019-04-19 11:26李兴东袁振洲张羽郭宏伟
山东科学 2019年2期
李兴东,袁振洲,张羽,郭宏伟
(1.北京交通大学交通运输学院,北京 100044;2.同济大学交通运输工程学院,上海 201804;3.北京理工大学机械与车辆学院,北京 100081)
交通运输系统的快速机动化进程带来了诸如污染排放、生态破坏等问题,针对这些问题出现了绿色驾驶的概念。绿色驾驶是指可以使驾驶人在驾驶过程中节油减排的一系列措施,又称为生态驾驶[1]。绿色驾驶的目的是使得燃油消耗和尾气排放最低[2-3],与之相关的基础理论及培训模式都对改善交通环境具有重要的理论价值和现实意义。Pampel等[4-5]对绿色驾驶降低燃油消耗的潜力做了研究, Haworth等[6]证明了绿色驾驶对减少尾气排放的作用是明显的。
绿色驾驶行为模式的特征在不同国家有着很大的差别。日本式绿色驾驶提倡在启动时缓慢加速,减少不必要的加速和减速,而德国式绿色驾驶倡导快速加速[7]。Pampel等[4]通过硬件在环仿真研究表明,绿色驾驶行为通常对应着更低的驾驶速度和更大的车头间距。Larsson[8]通过在车辆上加装加速控制装置,证明加速度的控制对尾气排放没有明显影响。Kobayashi[9]通过仿真发现加速度过小对尾气排放有负面影响。
交通流元胞自动机模型是为了模拟车辆运行而进行计算机模拟的非数值计算模型。NS模型是单车道交通流元胞自动机模型,模型将路段分为长度相等的多个元胞,每个元胞对应于单个车辆或者空置[9]。为了模拟多车道车辆运行情况,Nagel等在原有的NS模型基础上加入了换道规则[11]。
已有的研究证实了绿色驾驶的作用是明显的,但是关于绿色驾驶行为模式的研究成果有较大差异。较Vissim而言,元胞自动机研究车辆横向驾驶行为建模更加灵活,为了对横向和纵向驾驶行为特性同时进行探究,本文对多车道元胞自动机模型进行改进并用于仿真,给出了绿色驾驶行为判定标准和判定方法,最终得出了绿色驾驶行为(横向和纵向驾驶行为)特征。
1 驾驶行为特征仿真模型
1.1 驾驶行为建模
1.1.1 模型假设
(1)不考虑非机动车对机动车驾驶行为产生的干扰;
(2)机动车的运行速度和加速度受车辆特性限制,但是制动时减速度可以为无穷大;
(3)换道行为分为2种:自由换道和目的换道。自由换道指的是车辆为了获取理想的驾驶速度,在周围车道有较大的自由空间时采取的换道行为;目的换道指的是车辆为了完成预定的驾驶目标而发生的换道行为。
1.1.2 模型参数
模型中的仿真参数表示及含义如下:
仿真时间步长Δt:元胞运动的时间间隔,定为1 s;元胞宽度Δl:每个元胞宽度代表的道路长度,定为1 m;最大速度Vmax:元胞每次移动的最大速度,单位m/s;最大跟驰加速度Afollow:车辆在跟驰过程中所采用的加速度的最大值,单位m/s2;最大换道加速度Achange:车辆为了换道,在将速度调整到理想速度时所采用的加速度的最大值,单位m/s2;安全间距Gsafe:车辆目的换道时,与前后方车辆的最小间距,单位m;附加间距Gadd:车辆自由换道时,与前后车辆保持的最小间距与安全间距的差值,单位m。
1.1.3 模型演化规则
模型在已有的多车道元胞自动机基础上区分了自由换道行为和目的换道行为,并对两种换道行为分别设定演化规则。仿真过程的程序流程图如图1所示。模型演化规则是车辆移动的规则,分为4组。
(a)车辆产生规则
进入元胞自动机的车辆特征数据采用调查得到的车辆运行数据,调查地点为北京市三环,调查时间为非节假日非高峰时段。
(b)车辆换道规则
车辆相对位置及参数如图2所示。车辆换道时需要与前后方车辆均保持一定距离[12],其需要满足的条件如下所示:
向左换道条件
V5+L5≥V1+G,
V0+L4≥V4+G。
(1)
向右换道条件
V3+L3≥V1+G,
V0+L2≥V2+G。
(2)
目的换道和自由换道G取值分别为:
G=Gsafe,
(3)
G=Gsafe+Gadd,
(4)
式中,Gsafe为安全间距,Gadd为附加间距。

图2 车辆相对位置及参数Fig 2 Vehicles′ relative positions and parameters
(c)车辆跟驰规则
目的变道车辆根据车辆特性、随机慢化以及期望速度影响选择跟驰速度。其余车辆换道规则与经典NS模型的换道规则相同[13]。
(d)车辆消失规则
车辆车尾位置超出仿真路段时消失。
1.1.4 仿真路段及数据
仿真路段选取北京北三环联想桥附近的路段,路段长度282 m。仿真车道包括4条快速车道和2条辅道。仿真路段的示意图如图3所示。
每个仿真步车流量、车辆特征以及车辆换道率数据均来源于此路段实地调查。

图3 北京市北三环仿真路段Fig.3 Simulation sections in Beijing North Third Ring Road
1.2 模型参数标定
Vmax、Afollow、Achange、Gsafe、Gadd以及模型中的其他4个参数需要进行标定。
由于需要标定的参数多,且每个参数都是多水平,因此采用正交试验法。进行5水平9因素正交试验,共50组。
将试验误差定义为速度平均值误差和速度标准差误差之和,如式(5):
(5)
式中,Vt和Vo分别为试验平均区间速度和观测平均区间速度,单位m/s;St和So分别为试验区间车速标准差和观测区间车速标准差,单位m/s。
取各参数最小平均误差对应的水平作为最优解。Vmax= 12 m/s,Afollow= 2 m/s2,Achange= 3 m/s2,Gsafe= 10 m,Gadd=35 m,随机慢化速率的标定结果是P=0.15。
1.3 模型实现
模型用MATLAB程序实现。仿真模型运行过程截图见图4a,其中出现的车辆排队现象和调查过程中车辆排队情况(图4b)类似。
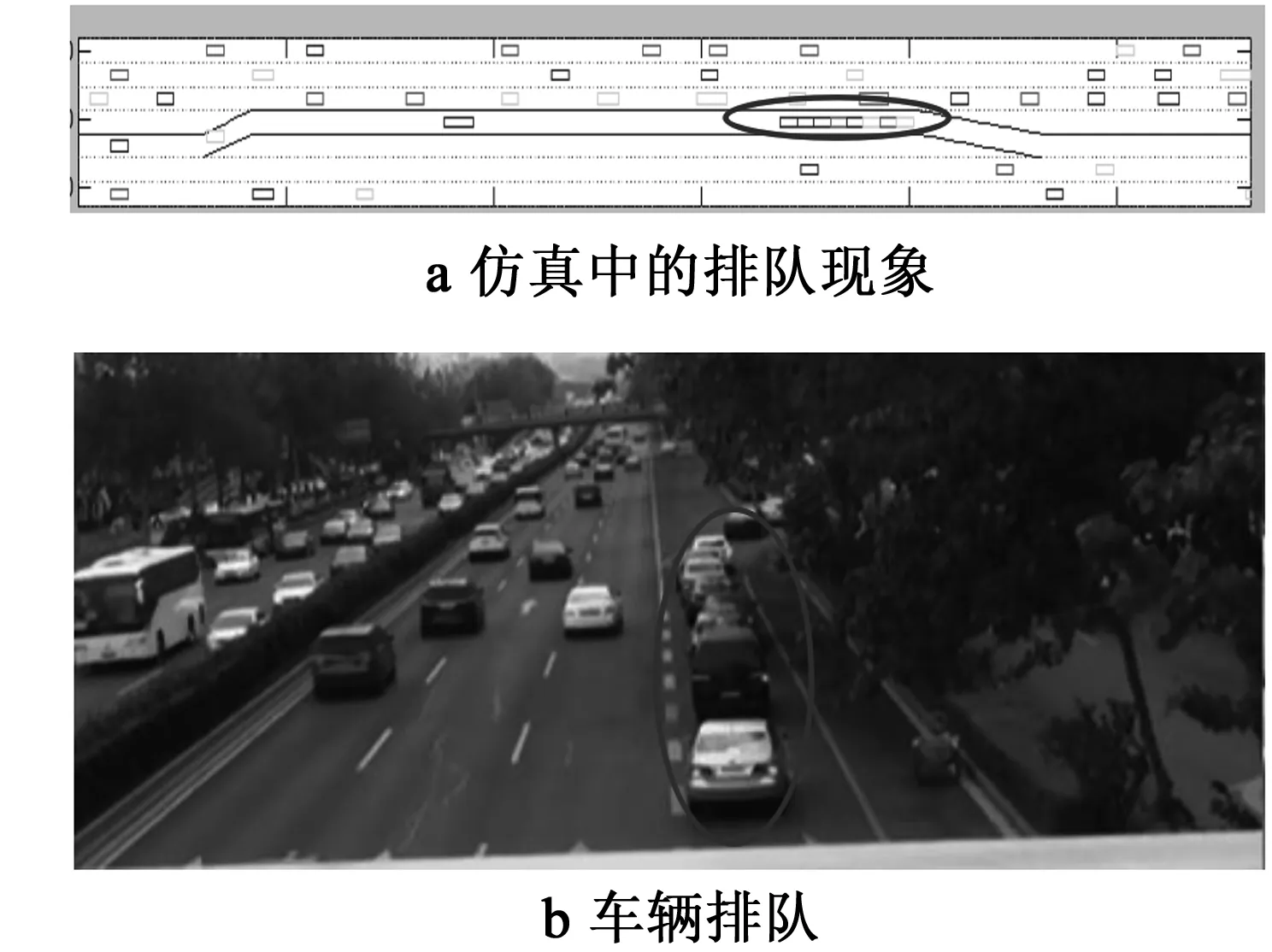
图4 仿真车辆运行与实际车辆运行Fig.4 Traffic scene in simulation and reality
每次仿真运行1800步,车辆排放和燃油消耗等数据取自301步至1500步。
1.4 模型验证
改变6条车道进车率,车辆密度及流量变化情况如图5所示。仿真参数设定为Vmax=21 m/s(即为75.6 km/h),随机慢化概率分别设定为P=0.15和P=0.30。
随着进车率上升,车流量逐渐上升并趋于稳定,这和开边界的元胞自动机的特性是一致的。密度-流量图左半部分形状和经典密度-流量图中车辆处于非受限情况下的曲线形状很相似。模型用于非受限交通流的分析基本上是符合实际的。
不同速度下密度-流量图如图6所示。当最大速度取为12 m/s(标定结果)时,车辆的行驶平均速度为11.14~11.27 m/s,与调查所得的地点车速和行程车速接近。

图6 不同最大速度对应的基本图Fig.6 Fundamental diagram of different maximum speed
2 绿色驾驶行为判定
绿色驾驶行为判定指标及方法是为了判断驾驶行为满足绿色驾驶的程度,进而确定绿色驾驶行为特征。
2.1 绿色驾驶行为判定指标
CO、HC和NOx是机动车3种主要排放物。机动车单位质量消耗的有效功率(比功率,VSP)是一个衡量单位时间燃油消耗的有效指标[14]。因此,将单位时间内3种污染物排放量以及VSP作为车辆油耗的计量指标。4个指标统称为MOE(measure of effectiveness,效能度量),记为M。
2.1.1 车辆油耗及排放量
M包括MCO、MHC、MNOx以及MVSP,其计算方法如式(6)[15]、(7)所示,M是MOE矩阵,数据来源于已有研究[16-17]。
(6)
M=max (M(1),0)。
(7)
M取值如下:
式中,a为汽车加速度km/(h·s);V为汽车速度(km/h);MCO、MHC及MNOx三者的单位均为mg/(s·t),MVSP的单位为kW/t。
式(6)拟合出的M计算公式在加速度为负时的拟合效果不佳,不能保证M值为正。式(7)是为了保证M值非负。
2.1.2 车辆平均油耗及排放量
由交通运行数据和车辆油耗排放特性数据可以计算出车辆单位质量运行单位距离的有效功以及排放。计算方法见式(8),
(8)

为了使分析和图形更为简洁,Maverage指标(包括Maverage1和Maverage2)均使用默认单位,Maverage1为mg/(t·km)和Maverage2为kJ/(t·km),并且不区分Maverage指标和MOE指标两词。
2.2 绿色驾驶行为判定方法
在研究的参数范围内,M值越小,表示燃油效率越高或尾气排放越低。因此为M确定阈值,如M值小于该阈值,则认为此指标表现良好。
所以,判定绿色驾驶行为的条件为:参数对应的4个M值均满足:
M≤αMmax+βMmin,
(9)
式中,α+β=1并且0≤α≤1;Mmax和Mmin分别为最大和最小M值。α越小,驾驶行为符合绿色驾驶的程度越高。根据仿真结果确定相应的α值,继而确定符合绿色驾驶的驾驶行为参数。此参数对应的驾驶行为即为绿色驾驶行为。
3 绿色驾驶行为模式特征
3.1 纵向驾驶行为
M受最大速度和最大跟驰加速度二者的影响情况如图7(图中参数均取默认单位,下同)所示。

图7 纵向驾驶行为对MOE的影响Fig.7 Influence of longitudinal driving behavior on MOE
随着最大速度和最大跟驰加速度的增加,CO、HC、NOx排放量以及VSP值都总体呈现增大的趋势。但是,最大速度处于较低水平时,最大速度的增大会使CO排放稍微减少,且对HC和NOx排放量影响很小。缓慢加速、保持车速在合理区间(α=0.20,11 m/s≤Vmax≤13 m/s,即39.6 km/h≤Vmax≤46.8 km/h),对降低燃油消耗和尾气排放都是有益的。
M受最大换道加速度和最大跟驰加速度的交互影响如图8所示,可知最大换道加速度的增大使得4个M值逐渐升高,并且较小的跟驰加速度对应着低的排放和燃油消耗。因此,符合绿色驾驶行为理念的驾驶行为对应着小的换道加速度(α=0.30,Achange≤1.0 m/s2)和较小的跟驰加速度(α=0.30,2.5 m/s2≤Afollow≤3.0 m/s2)。
3.2 横向驾驶行为
横向驾驶行为对MOE的影响如图9所示。CO、HC、NOx排放量以及VSP随着横向驾驶参数的变化趋势基本相同,附加间距对MOE值基本没有影响,安全间距处于中间水平时,各M均最大。这是因为较小的安全间距可以减小车辆换道前的调整时间,从而减小车速调整过程中的燃油消耗和尾气排放;较大的安全间距使得车辆换道结束后,后方车辆的车速调整幅度变小,从而降低M。
小的安全间距是以牺牲驾驶安全为条件来取得好的绿色驾驶效果,这是不可取的。因此,增大安全间距(α=0.35,Gsafe≥30 m)来取得好的绿色驾驶效果是更明智的做法。
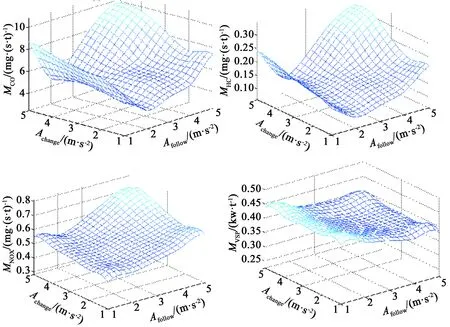
图8 加速度对MOE的影响Fig.8 Influence of acceleration on MOE

图9 横向驾驶行为对MOE的影响Fig.9 Influence of lateral driving behavior on MOE
4 结语
本文基于多车道的元胞自动机交通流模型建立了用于绿色驾驶行为分析的仿真模型。通过对仿真结果数据进行分析,得到在研究路段(城市快速路):
(1)速度保持在合理区间(11 m/s≤Vmax≤13 m/s,即39.6 km/h≤Vmax≤46.8 km/h)是合理的绿色驾驶行为;
(2)缓慢加速(Achange≤1.0 m/s2、2.5 m/s2≤Afollow≤3.0 m/s2)、保持车速稳定是合理的绿色驾驶策略;
(3)综合考虑驾驶安全,较大的安全间距(Gsafe≥30 m)是符合绿色驾驶概念的。
文中所指绿色驾驶行为特性指的是所有车辆均按照绿色驾驶准则行驶时应当具有的特性。当其余车辆仍然按照平常的驾驶习惯行驶,只有实验车辆按照绿色驾驶准则行驶,此时的绿色驾驶行为特性应当和文中分析结果有所区别。这两种情况下的绿色驾驶行为特性有何异同,还需进一步研究。同时在接下来的研究过程中需要进一步细化模型的各个参数,分析不同的驾驶参数条件下车头间距、车头时距等的变化规律,从而得出绿色驾驶行为对驾驶安全的影响。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
计算机工程与科学(2022年2期)2022-03-22
数学物理学报(2021年3期)2021-07-19
中国交通信息化(2019年4期)2019-07-13
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
西北大学学报(自然科学版)(2018年2期)2018-04-18
小学生导刊(低年级)(2016年5期)2016-05-27
