
电极尺寸及排列结构对全织物投射式电容触摸垫触摸性能的影响
2019-04-18 06:30
产业用纺织品 2019年2期
东华大学纺织学院, 上海 201620
近年来,随着科技的发展,有关柔性电容触摸装置在智能纺织品中应用的研究,得到了越来越多的关注,主要包括织物开关、织物键盘、织物电容触摸垫等[1]。前两种触摸装置的研究已经比较成熟,但织物电容触摸垫因其性能受干扰因素较多,仍在研发阶段。
织物电容触摸垫分为织物表面式电容触摸垫和织物投射式电容触摸垫,而且电容触摸垫的结构参数是影响触摸效果的重要因素,诸如极板尺寸、形状及极板间相互位置、介质介电常数等。蒋晶晶等[1]、HELLER等[2]、HAMDAN等[3]研究了矩形电极对实际操作过程中织物表面式电容触摸垫的分辨率和线性度的影响,发现在触摸垫有效使用范围内,其分辨率和线性度都较高,但在靠近触摸垫边缘处较低,响应速度较慢。KANG等[4]采用相互垂直的条形电极,JOSUE等[5-6]采用相互垂直的菱形电极,研究触摸位置对织物投射式电容触摸垫的电容变化的影响,发现织物投射式电容触摸垫的电容变化与中间介质层的厚度、介电性能、表面粗糙度有关。SERGIOM等[7]把条状导电织物作为电极并以相互垂直的方式分布在泡沫隔离板的两侧,上下行列交叉的导电织物形成电容阵列,构成触摸垫,其像素为(24×16)dpi,电极间距为8.000 mm,在该触摸垫上进行按压形成图像,发现图像的清晰度与导电织物表面粗糙度、织物厚度不匀及织物表面尺寸有关,并提出可利用降噪算法及增大信号方法改善图像清晰度和边界效应,验证了此导电织物用作电容触摸装置的可行性。TAKAMATSU等[8]4485以聚噻吩涂层导电针织物为电极、PDMS(聚二甲基硅氧烷)为中间介电层,构成三明治结构电容阵列,证实了导电针织物形成电容触摸装置的可行性。显然,这些研究表明电极材料及结构、介电层材料等因素都会影响电容触摸垫的触摸性能,但尚未建立这些因素与触摸性能之间的关系。
从基本原理看,电容触摸垫的工作原理类似于电容式阵列传感器。纺织结构电容式阵列传感器可以分为3类:同轴皮芯结构电容纱及织物、上下表面电极为导电纱线的多层织物、导电织物夹持不带电织物的复合结构。GU等[9]、GORGUTSA等[10]、GUO等[11]和ROH等[12]将导电纱线与普通纱线复合得到复合导电纱线,再根据设计的电容式阵列传感器结构织成织物。他们研究了复合导电纱线长度、电容器单位长度和复合导电纱线电阻等参数对电容式阵列传感器电容变化的影响,得出复合导电纱线长度和电容单位长度较短及复合导电纱线电阻较小时,电容式阵列传感器的电容相对变化率较大的结论。胡爽[13]研究了电容式织物传感器的性能,发现导电织物的纱线原料、织物面积、织物经密、纱线细度均对电容式织物传感器的性能有一定的影响,传感器的电容值随着织物面积和织物经密增大而增加,随着纱线细度增加而下降。已有学者从传感性能角度探讨了电容式阵列结构及材料对织物电容触摸垫性能的影响,发现通过改善传感器的走线长度、传感器电极之间的间距、传感器之间的干扰等,能提升织物电容触摸垫的灵敏度[14]。
基于上述分析发现,已有研究证实了以织物作为电极制备电容触摸垫的可行性,但缺少织物电容触摸垫的电极尺寸及排列结构对电容变化量的影响的研究。本文针对全织物投射式电容触摸垫,研究电极尺寸及排列结构与触摸垫的电容相对变化率之间的关系。
1 投射式电容触摸垫的结构、工作原理及评价标准
1.1 结构与工作原理
投射式电容触摸垫由相互垂直的行电极和列电极组成,每个电极与芯片连接,从而控制行电极的激发与列电极脉冲信号的感应。每条行电极和列电极的交叉处形成一个节点电容。当手指触摸到电容触摸垫时,触摸点附近的行、列电极之间的电容量发生变化,故而芯片通过识别电容量发生变化的位置检测触摸方位。利用交叉点扫描技术检测整个电容触摸垫的互电容量,在触摸位置所发生的互电容量变化即为触摸信号值。当互电容量变化越大时,电容触摸垫的灵敏度越高。
全织物投射式电容触摸垫整体采用织物组成,其结构如图1(a)所示,包括5个部分:表层和底层为覆盖层,其不导电;中间层为介质层,其上层为行电极、下层为列电极,行、列电极之间相互垂直交叉排列。全织物投射式电容触摸垫的结构参数如图1(b)所示,分别是同一层上的电极间隙、电极宽度及触摸垫厚度。

(a) 结构

(b) 结构参数
触摸垫中存在互电容Cm和自电容CP。互电容指电极之间产生的电容,包括行、列电极之间产生的电容及同一层上相邻电极之间产生的电容;自电容指电极与地之间产生的电容。互电容量可以用平板电容的标准表达式给出:
(1)
式中:ε为织物的介电常数,F/m;s为行、列电极之间的正对面积,m2;d为行、列电极之间的间距,m;k为静电力常数,k=8.988 0×109N·m2/C2。
图2所示为单个触摸点触摸前后的等效电路图,可以看出,在行电极上施加一定电压,列电极便接收信号,每个列电极的信号传递给芯片。在手指触摸情况下,手指与上电极之间产生的耦合电容和手指与下电极之间产生的耦合电容增加,下电极接收的信号将显著减小。织物是柔性物体,受到手指触摸时会产生形变,使得行、列电极之间的间距d发生变化,而且由于织物结构改变,电极织物的介电常数ε发生变化。这些因素相互作用,使得触摸垫的电容发生变化[15]27-28。

(a) 触摸前
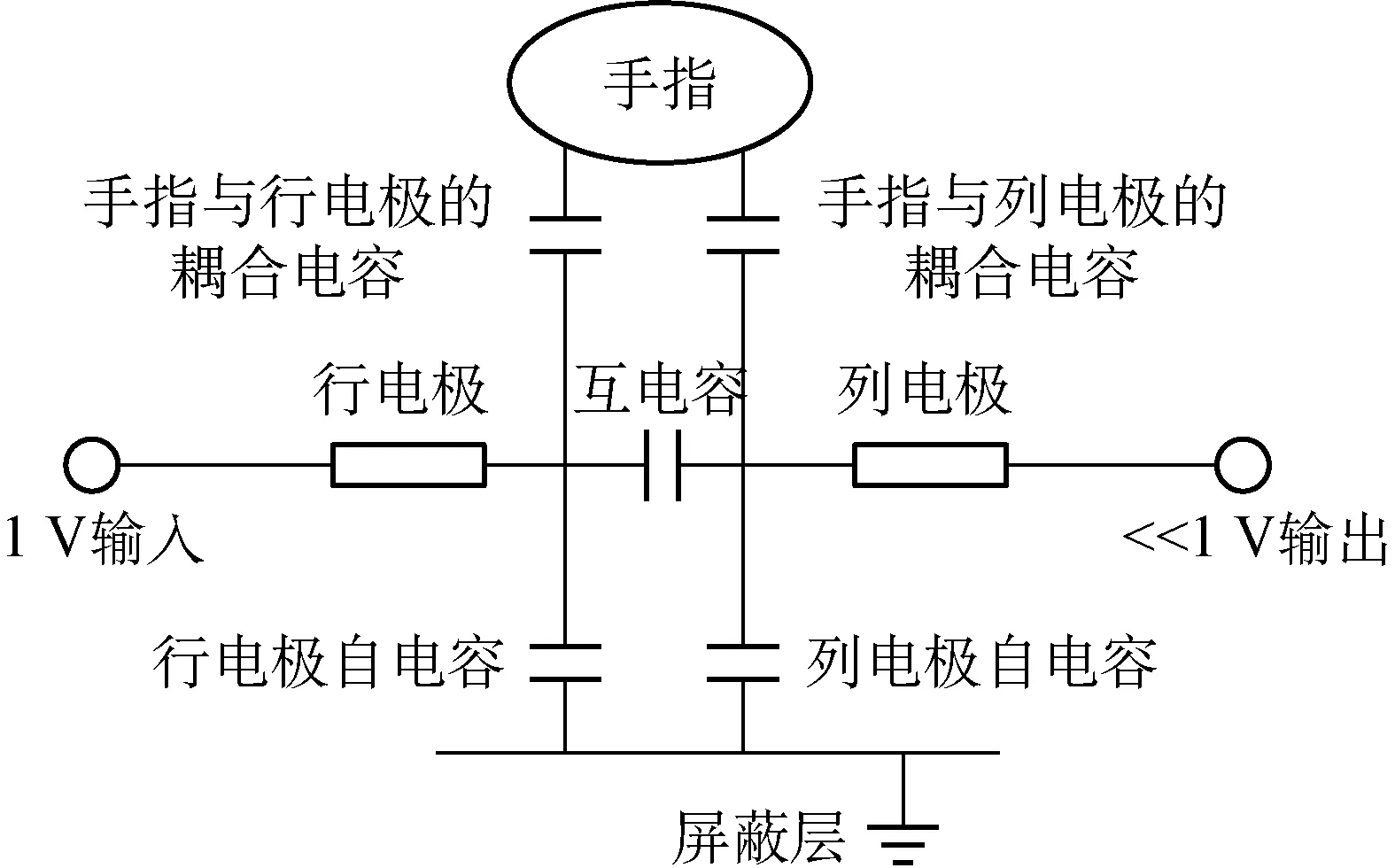
(b) 触摸后
1.2 评价标准
灵敏度为评价触摸垫触摸性能的基本指标,它指的是触摸垫受到手指触摸时产生的最大信号(即触摸信号)与设定的手指阈值的比值,即灵敏度=触摸信号/手指阈值。手指阈值又叫临界值,低于此阈值的触摸信号不能识别。显然,触摸信号越大,灵敏度越大;手指阈值越低,灵敏度也越大。但手指阈值不能设置得太低或太高,太低会导致误触发,太高会降低灵敏度,一般确定为手指触摸时产生的最大信号的1/2左右[15]4。
2 全织物投射式电容触摸垫的制备
2.1 材料准备
上、下覆盖层和中间介质层选用棉织物,行、列电极采用镀银导电织物(其电阻为0.17 Ω)。为了讨论电极宽度和电极间隙对触摸信号的影响,选择5种电极宽度(3.000、 4.000、 5.000、 6.000、 7.000 mm)和3种电极间隙(2.000、 3.000、 4.000 mm)。
2.2 试验设计
针对电极尺寸及排列结构两个因素,主要考察电极宽度、电极间隙及电极宽度/电极间隙比值对触摸垫灵敏度的影响,共设计了25组试验,具体见表1。试验中采用砝码触摸试样,施加压力为822 Pa[8]4486-4487。

表1 试验设计
测试分两种情况:一是不受干扰情况,即只测试1根上电极和1根下电极构成的电容器;二是受周边电极干扰情况,即在触摸垫上取1根上电极、1根下电极进行测试。电极根数的多少会改变触摸垫上电容器阵列数量,且电容器阵列数量影响触摸点的电容量。采用砝码在每个触摸垫的同一位置上触摸6次,分别记录每次触摸前和触摸时触摸垫的电容,计算触摸前和触摸时触摸垫的电容相对变化率(定义为电容变化量ΔC与初始电容C的比值,即ΔC/C,其中ΔC=触摸时的电容量-触摸前的初始电容),结果取平均值。图3为全织物投射式电容触摸垫的触摸试验示意图。

图3 全织物投射式电容触摸垫的触摸试验示意
3 结果与讨论
3.1 电极宽度对电容相对变化率的影响
从图4能够看出,在触摸垫上的触摸点较少的情况下,电容相对变化率随电极宽度增加逐渐减小;当触摸点增加到一定数量时,电容相对变化率随电极宽度增加基本不发生变化。由式(1)可知电极宽度是影响互电容的关键因素,在其他条件不变的情况下,电极宽度增大,则电荷的接收面积扩大,因此初始电容C增加,手指触摸时所带走的电荷数量相应增多,即剩余电容量减少,故电容相对变化率减小。

(a) 电极间隙为2.000 mm

(b) 电极间隙为3.000 mm
3.2 电极间隙对电容相对变化率的影响
从图5可以看到,随着电极间隙增加,电容相对变化率无显著变化。电极间隙增加使得相邻节点电容之间的电场叠加作用减弱,触摸点的初始电容减小,触摸时电容变化幅度不大,所以电容相对变化率增加不明显。另外,同一层上的电极根数减少,则相邻节点电容之间叠加的电场强度下降,触摸垫上各触摸点的初始电容明显减小,而砝码触摸时带走的电荷数量减少不明显,所以电容相对变化率变大。

(a) 电极宽度为4.000 mm

(b) 电极宽度为5.000 mm
3.3 电极宽度/电极间隙比值对电容相对变化率的影响
图6所示为电容相对变化率与电极宽度/电极间隙比值的关系,可以看出,电容相对变化率受电极宽度/电极间隙比值的影响较大,当电极宽度/电极间隙比值为3/2时,电容相对变化率最大。随着电极宽度/电极间隙比值提高,相邻节点电容之间的电场叠加作用呈不规律变化,在电极宽度/电极间隙比值为3/2时,相邻节点电容之间叠加的电场强度达到最大,相应的电容相对变化率最大。

图6 电容相对变化率与电极宽度/电极间隙比值的关系
4 结论
本文采用5种不同电极宽度和3种不同电极间隙,考察电极尺寸及排列结构对全织物投射式电容触摸垫触摸性能的影响,以触摸垫的电容相对变化率为评价指标,发现:
(1) 触摸垫的电容相对变化率与电极宽度的关系较显著,受电极间隙的影响较小,受电极宽度/电极间隙比值的影响较大。
(2) 触摸垫的最佳电极宽度/电极间隙比值为3/2。
(3) 比较不同电极根数的触摸垫的电容相对变化率,在相同电极间隙条件下,随着电极宽度增加,电容相对变化率逐渐减小;在相同电极宽度条件下,随着电极间隙增加,电容相对变化率基本不变。
猜你喜欢
湖南工业职业技术学院学报(2022年3期)2022-12-06
计算技术与自动化(2022年1期)2022-04-15
湖南电力(2021年4期)2021-11-05
初中生世界·九年级(2020年9期)2020-09-21
电子制作(2019年10期)2019-06-17
火力与指挥控制(2016年8期)2016-09-21
浙江电力(2016年9期)2016-07-05
通信电源技术(2016年6期)2016-04-20
物理教学探讨(2015年5期)2015-07-15
科技与创新(2015年11期)2015-06-16
