基于机器视觉的水电站防外力破坏系统设计
2019-04-14 03:53李文静
重庆电力高等专科学校学报 2019年6期
李文静
(重庆水利电力职业技术学院 智能制造学院,重庆402160)
西南地区是我国水力资源最为富集的地区,一直是我国水电开发的主战场。“十二五”以来,长江上游西南地区一大批大中型水电站工程相继建成投产,形成了我国最大的优质清洁水电基地。水力发电站工程的建立与发展不仅为我国提供了大量廉价的电力资源,而且还肩负着防汛、抗旱、灌溉、保护环境的作用,推动了国民经济的发展,为人们的正常工作和生活提供了重要的物质保障。
然而,由于大多数水电站都建设在遥远偏僻、人口稀少、环境条件恶劣的地方,极易遭受到设备被盗、私挖电缆,火灾、高大建筑机械施工(塔吊长臂触线)等外力破坏[1-2],人工管理或者常规管理相当麻烦。国内外因外力破坏导致电站发生事故的事例不胜枚举。2011年6月,由于工作人员的疏忽,加之没有强有力的防护措施,山西龙口电站大修期间发生了火灾。2011年8月4号,兰州西固区某水电站库房千米电缆线被盗,价值达40余万元。2016年7月,重庆狮子滩水电站工作人员在回吊电站上水泵电机过程中,发生吊运电机擦挂集水井水泵控制屏的液晶屏面等事故。
发生此类事故的原因,除了人们法律观念淡薄、操作施工机械时的大意疏忽等之外,最主要的原因是目前我国水电站的智能化建设方面相对滞后,采用传统的视频监控技术和红外探测技术,在实际应用中都会产生大量的漏报警和误报警,需要人工进行判别处理,从而延误处理时机[3]。因此,为了减少或消除水电站外力破坏事故,保障电网的安全稳定,提出一种基于机器视觉的水电站防外力破坏系统。
1 系统总体设计方案
文中提出的水电站防外力破坏系统,采用分布式智能体系结构、模块化设计,主要由现场监控装置、数据传输、后台监控中心3部分组成。现场监控装置采用图像处理与识别技术,完成水电站设施现场实时视频采集、分析、报警和数据汇总,并通过安全接入平台与指挥中心通讯,用户可以通过局域网PC端实现查看现场视频、接收图片等规定功能,同时可以通过广域网MP端实现智能控制等高级应用功能[4]。系统组成示意图如图1所示。
2 关键技术分析
2.1 Kalman滤波器背景建模法
Kalman滤波器是一种根据过去的信号,利用时变随机信号的统计特性,以线性最小均方差作为最优化准则,对随机信号的当前、未来值做出尽可能接近真值估计的时域递归滤波方法[5-7]。

(2)
式中:A(x,y,tk)=1,H(x,y,tk)=1。式(1)为点(x,y)处的Kalman滤波器状态估计方程,式(2)为像素点(x,y)的Kalman滤波器状态预测方程。把图像分为含有运动前景的区域与相对静止的背景区域,为建立更加准确的背景模型,对前景与背景图像进行分别加权更新,设Kalman增益为
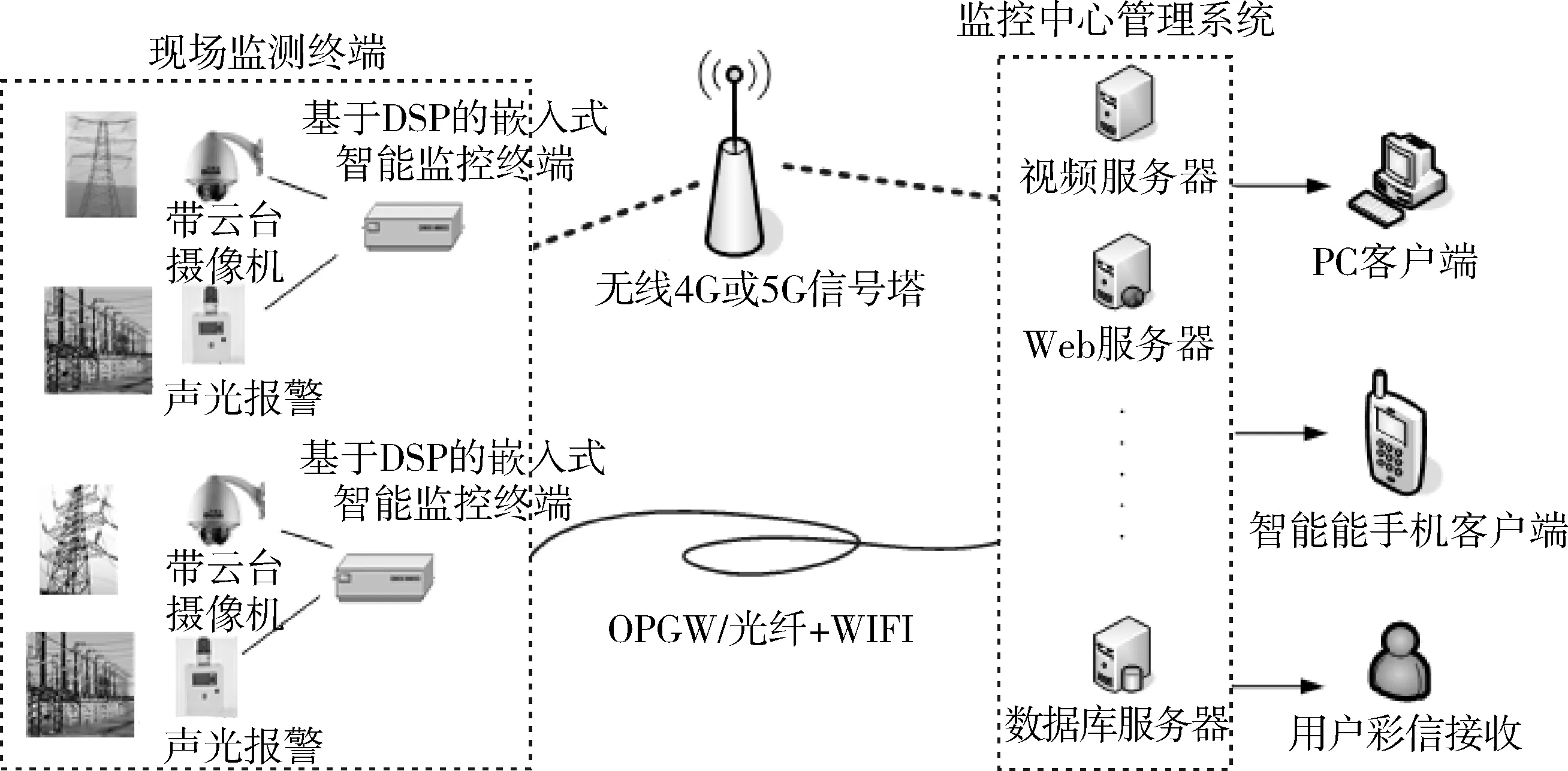
图1 系统组成示意图
K(x,y,tk)=αc(x,y,tk)+β[1-c(x,y,tk)]
(3)
(4)
(5)
式中:c(x,y,tk)为背景模型估计的前景标识;β、α分别为背景和前景因子;Th(tk)表示提取前景目标的分割阈值。
其中α为d(x,y,tk)>Th(tk)时的Kalman增益;β为d(x,y,tk)≤Th(tk)时的Kalman增益;背景自适应性是由α与β值决定,考虑到算法的实时性,实际应用中根据经验来取一些固定的值。基于Kalman滤波法的背景估计流程图如图2所示。
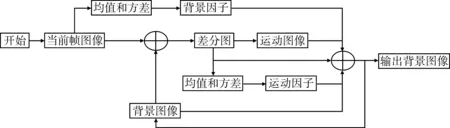
图2 Kalman滤波器背景估计流程图
2.2 人工神经网络火灾识别
火灾火焰燃烧状态受诸多因素的影响,具有很强的随机性。因此,火灾火焰信号是一种非线性信号,以BP神经网络作为火灾图像识别的模型,以提高火灾火焰识别的准确性和可靠性[8]。
1)神经网络输入信号
根据火灾火焰图像的形状、动态特征及颜色信息,确定火焰区域面积、圆形度以及尖角数、颜色一阶矩等参数值作为输入信号。
2)神经网络隐含层节点数
采用如下公式计算隐含层节点数
(6)
式中:y为隐含层节点数;c为输出节点数(或分类数);r为输入节点数(或特征向量维数)。
3)神经网络输出信号
按照想要分类的数目将神经网络的输出层对应“干扰物体”“火灾火焰”“林区景物”3个神经元。
4)学习样本
对于火焰识别,火灾图像样本库也是必不可少的。图3所示为BP神经网络的图像识别框图。
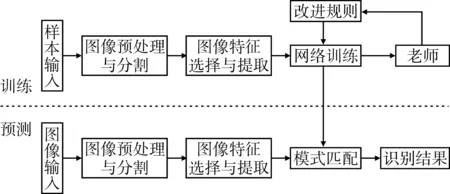
图3 BP神经网络的图像识别框图
3 实验与结果分析
3.1 目标入侵检测
防止人或大型动物进入危险区域、防止室内外重要设备被盗或破坏、防止高大建筑机械施工(塔吊长臂触线)破坏都属于目标入侵检测。该水电站防外力破坏系统利用基于Kalman滤波的背景减除法实时检测水电站内、线路杆塔附近等环境中是否有人或大型动物进入危险区域,是否有设备被盗、私挖电缆、大型机械野蛮施工撞击杆塔、塔吊触线等电力事故的发生。
目标入侵检测算法,首先需要对视频图像进行预处理,包括监控区域的设定、图像增强、滤波、转换等,使其有利于后续检测的实现。其次,利用基于Kalman滤波背景估计对运动目标进行提取、背景更新,再通过形态学运算、阴影去除、区域连通的方法等对提取目标进行后处理。最后,获取目标的面积及外接矩形,并通过设定面积阈值、目标外接矩形长宽比阈值来识别目标。在特定监测区域检测到对水电站电力系统安全造成威胁的动物、行人或大型机械等,则启动报警。图4所示为目标入侵检测算法流程图。
为验证算法的可行性,利用上述目标检测算法对某杆塔附近人员爬塔、吊臂触线进行检测,如图5及图6所示。
图5(a)所示为虚拟检测区域的选取,图5(b)为使用本文提出的目标入侵检测算法对某杆塔附近人员爬塔进行检测的效果图。如图5所示,该检测现场环境背景较为复杂,单纯依靠传统的视频监控,监控人员用肉眼很难看出运动人体目标,而本文提出的目标入侵检测法能够精确地检测到运动目标,并对运动目标做标记,传送到后台进行预警。图6为水电站附近施工吊臂触线检测的效果图,算法能够精确地检测到导线附近异物入侵,并及时报警。
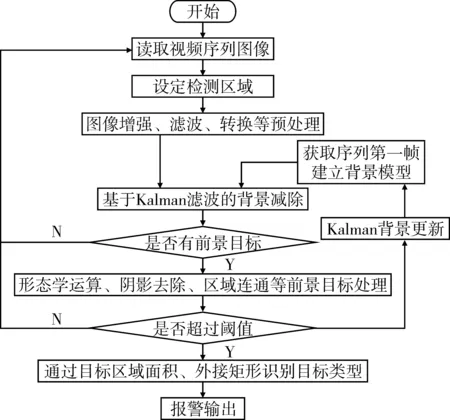
图4 目标入侵检测算法流程图


(a)虚拟检测区域的选取(b)杆塔附近人员爬塔检测效果图图5 目标入侵检测图
3.2 火灾识别
由于水电站大部分时间处于无火灾状态,因此针对该监控系统设计的水电站火灾识别算法,首先通过背景差分法检测是否具有异常以检测疑似区域;在检测到具有火灾疑似区域的基础上,通过阈值分割等一系列算法,精确提取目标区域,以便下一步的检测与识别。火焰特征的检测包括对面积、动态特征(尖角、圆形度)以及颜色等的提取,并设定各自的阈值,将每个检测结果和预设阈值进行比较。最后通过人工神经网络进一步精确识别、判断火灾。如果检测到有火灾发生的趋势,则立即启动报警,运行人员则对其进行重点监控并及时通知巡检人员赶赴现场查看或实施灭火。否则,重复进行以上步骤。火灾识别流程图如图7所示。

图6 异物入侵检测效果图
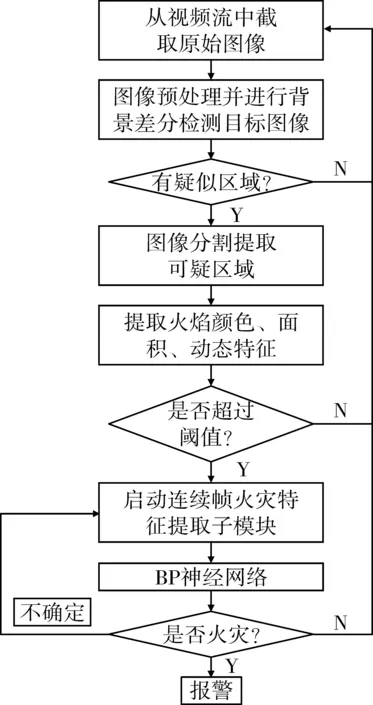
图7 火灾识别算法流程图
为验证算法的可行性,利用本文所提出的算法对某火灾现场图像进行处理,如图8所示。
图8(a)为某火灾现场图片,图8(b)为利用本文提出的算法进行火灾识别效果图。该算法能够精确提取火灾图像,并反馈火灾面积大小数据,及时启动报警。
4 结语
为有效减少或避免水电站外力破坏事故的发生,设计了水电站防外力破坏系统总体方案,讨论了系统现场监控装置、数据传输、后台监控中心3部分的组成及其实现的功能。并重点分析了基于数字图像处理的目标入侵检测、火灾识别图像处理的步骤及方法。实验结果表明,本文中所设计的算法能够精确检测目标入侵,识别火灾烟雾,可以广泛应用于水电站智能监控,为水电站的安全稳定运行提供有力保障。

(a)某火灾现场图

(b)火灾识别效果图图8 火灾识别前后效果图
猜你喜欢
西北水电(2022年1期)2022-04-16
大众文艺(2021年15期)2021-08-25
金桥(2021年8期)2021-08-23
水电站设计(2020年4期)2020-07-16
流行色(2020年2期)2020-04-28
南京大学学报(数学半年刊)(2020年1期)2020-03-19
流行色(2019年11期)2020-01-09
流行色(2019年11期)2020-01-09
初中生(2018年6期)2018-02-26
小雪花·成长指南(2015年5期)2015-05-25