
三维激光扫描技术在井巷工程中的应用
2019-04-14 03:38朱海斌
中国煤炭 2019年12期
朱海斌
(神华和利时信息技术有限公司,北京市东城区,100010)
巷道空间因其具有独特的机构特征,一些测量手段不适用于地下空间。巷道空间实时变化,难以做出固定坐标点,依靠基准点的全站仪设备无法准确测量;在进行地下空间测量过程中,巷道地下空间也无法直接使用GPS信号辅助测量,因此传统依赖GPS的测量仪器无法进行测量;另外,巷道空间结构复杂,传统的测量手段难以一次性获取全貌数据。
传统的测量方式是对井巷固定间隔取一个断面,在断面两帮和顶底板各设置一个点,然后测量两帮以及顶底板测点之间距离的变化,得到巷道变形量。当发现区域变形量较大时,再对其进行加密处理并监测,然后通过得到的数据绘制两帮和顶板的收敛量即收敛速率随时间变化的曲线,通过分析得到巷道变形的规律[1]。但传统的方式面临数据传递不实时、数据采集不全面、数据形式不直观、精度差等问题,同时人员劳动量较大。
三维激光扫描技术以高效、快速、非接触、短时间获得海量测绘数据等技术优势迅速发展成为一种全新的空间数据获取工具和手段,针对复杂巷道的测绘也十分适用,尤其在巷道基础测绘、巷道变形监测中能发挥重要作用,能够实现数据的实时传输,并且能够全面采集巷道的高精度点云数据,从面的角度对巷道进行监测,得到全面、真实的监测结果[2-3]。本文对三维扫描技术进行了全面介绍,并且结合山西五家沟井工矿数字化项目,详细介绍了三维激光扫描技术在井巷工程中的具体应用流程。
1 三维激光扫描技术
1.1 技术介绍
三维激光扫描技术又称实景复制技术,是测绘领域继GPS技术之后的一次技术革命。它突破了传统的单点测量方法,具有高效率、高精度的独特优势。三维激光扫描技术能够对井巷区域进行全方位的自动化扫描,扫描井巷表面全部的三维点云数据,因此可以用于获取高精度高分辨率的数字巷道模型。
1.2 技术原理
三维激光扫描技术是利用激光测距的原理,通过记录被测物体表面密集的点的三维坐标、反射率和纹理等信息,可快速复建出被测目标的三维模型及线、面、体等各种图件数据。由于三维激光扫描系统可以密集地获取目标对象的大量数据点,因此相对于传统的单点测量,三维激光扫描技术也被称为从单点测量进化到面测量的革命性技术突破[4]。三维激光扫描测量原理如图1所示。
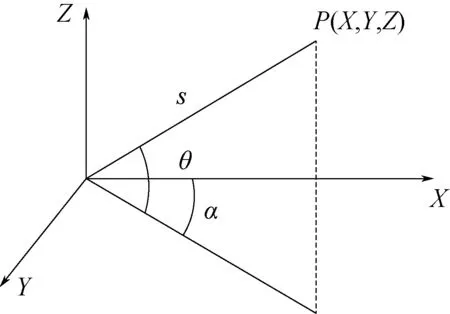
图1 三维激光点坐标计算原理
三维激光扫描测量通常使用仪器自身的坐标系统,通过对物体三维信息数据的采集获得距离观测值s,精密时钟控制编码同步测量每个激光脉冲横向扫描角度α和纵向角度θ,其中X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直。由以上数据可得三维激光点P的坐标(X,Y,Z)坐标,计算式如下[1]:
(1)
1.3 三维激光扫描仪器
随着三维激光扫描仪的应用越来越广泛,人们对它的认识和研究也越来越深入,从而使得市场上三维激光扫描仪的种类也越来越多。按照载体的不同,三维激光扫描系统又可分为机载雷达激光扫描系统、地面三维激光扫描系统和便携型三维激光扫描仪等。
机载雷达激光扫描系统多以无人机为载体,现在常用的机载雷达激光扫描系统一体化集成高精度激光扫描仪、GPS、IMU等传感器,同步获取三维激光点云和定位定姿数据,通过配备的数据处理和应用软件,快速生成DSM、DEM,制作DLG和3D模型。机载雷达激光扫描系统扫描点云精度一般能达到厘米级,不适用于毫米级及亚毫米级精度要求的工程,但是由于该系统重量轻、携带方便、成果处理效率高,广泛应用于应急测量、大比例尺地形测绘、电力巡检、公路勘测、海岸岛礁测量、地灾测量等领域。机载雷达激光扫描系统无人机如图2所示。

图2 机载雷达激光扫描系统无人机
地面三维激光扫描仪系统的扫描仪是当前工业市场的主要机型。该机型要求设备与物体相对静止,位置稳固。此类扫描仪精度高,耐用性好,多应用于近距离扫描场景中,且精度最高能达到毫米级,适用于文物测绘、高精度地形测量、建筑精细测绘以及工业精细化建模,但是由于站位式扫描需要后期对扫描的单站数据进行拼接处理,对于大场景的扫描工程工作量较大。地面站位式激光扫描仪如图3所示。

图3 地面站位式激光扫描仪
现在常见的便携型三维激光扫描仪是手持扫描仪与车载扫描仪,此类扫描仪轻便小巧,易于携带,因适用扫描对象不同,扫描距离也有远有近,精度范围高的可达到毫米级、低的可到厘米级;本项目选用的slam激光扫描系统是最新的轻量级旋转型激光扫描仪,支持手持、杆装或者车载,每秒能够记录超过40000个测量点,具有IP6等级,可以承受危险和恶劣的环境,不需要GPS比传统的测量或者站位激光扫描速度更快,特别适用于狭长复杂的巷道扫描工作。slam激光扫描仪如图4所示。

图4 slam激光扫描仪
1.4 三维激光扫描技术流程
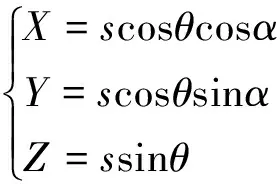
整个三维激光扫描技术流程可以分为外业扫描、内业数据处理两部分。三维激光扫描技术流程如图5所示。
2 工程实例
笔者主要研究三维激光扫描技术在井下巷道变形监测中的应用,五家沟煤矿工作面煤层厚度大,结构较复杂,并且受泥岩、砂岩复合型顶板的影响,工作面开采过程中冒漏顶、片帮现象频发,甚至出现支架压死、耳座断裂等异常矿压现象,因此,需要频繁监测巷道的变形情况,做好灾害的预防工作,由于巷道空间实时变化,难以得到固定坐标点,依靠基准点的全站仪设备无法准确测量;巷道地下空间无法直接使用GPS信号辅助测量。在进行地下空间测量过程中,难以依赖GPS导航定位信号,导致传统的依赖GPS测量仪器无法进行测量。另外巷道空间结构复杂,传统的测量手段难以一次性获取全貌数据。于是选用手持扫描仪对重点监测区域进行阶段性扫描工作,工作主要分为数据采集、数据处理、精度控制三部分。
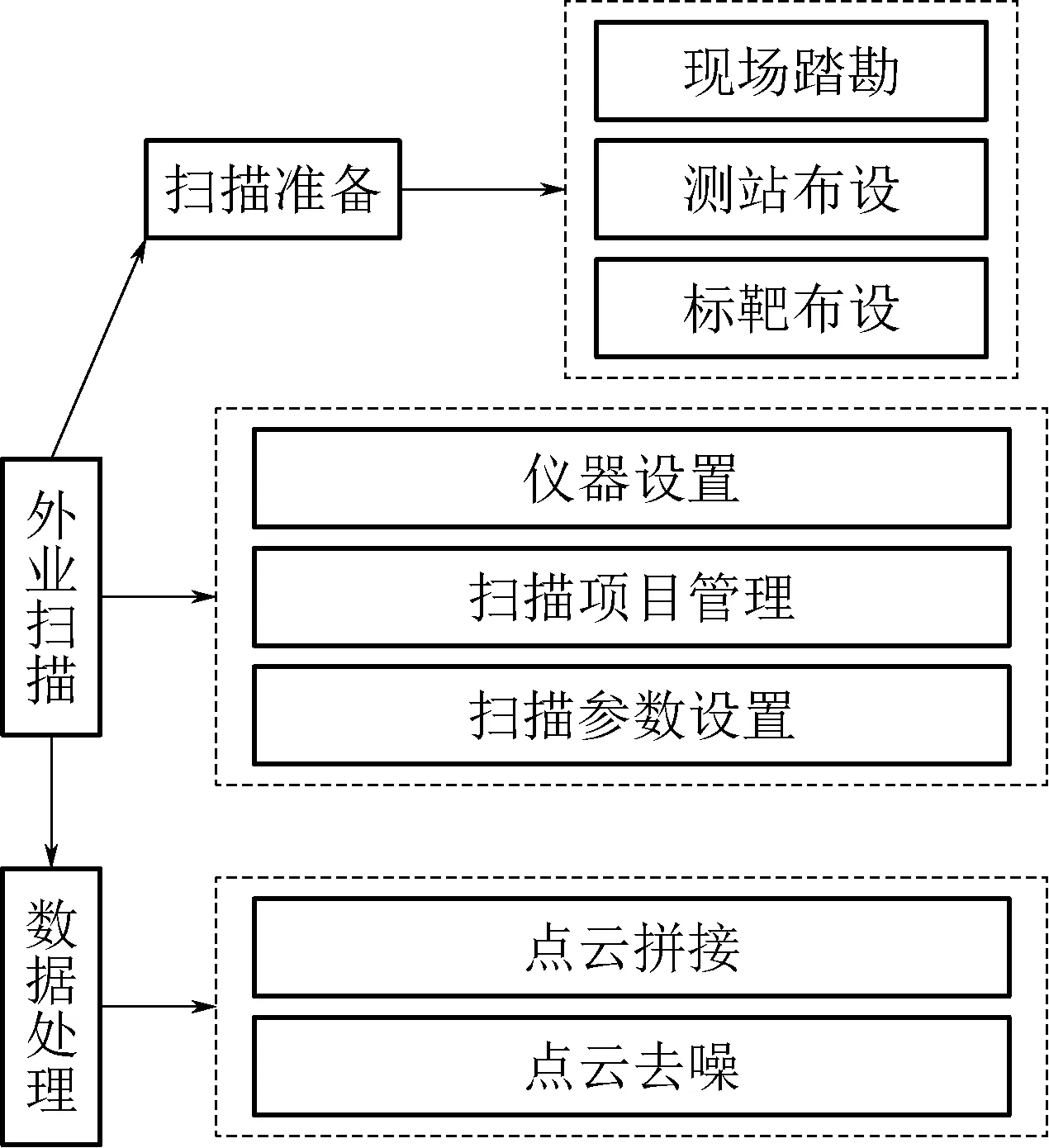
图5 三维激光扫描技术流程
2.1 外业数据采集
2.1.1 现场踏勘
在进行巷道的扫描工作之前,首先对巷道进行综合考察,包括巷道行车情况以及巷道走向,确定标靶位置与扫描方案。需要注意以下几方面问题:一是合理规划仪器行走路线及行进速度,可以减少冗余数据量的同时还能减少拼接误差;二是合理布置扫描标靶,保证仪器能够很好地识别标靶数据;三是保证单站扫描数据能拼接成一个完整的被测物体点云模型。
2.1.2 确定扫描方案
井下巷道扫描采集难点在于:井下工作环境复杂,通道狭长,空间有限,且车流量大。采用传统的地面式扫描仪无法快速准确获取完整数据,扫描过程中容易受到影响,且拼接误差过大。针对这种情况,选取新型手持扫描仪,这种扫描仪具有体积小巧、灵活性强的特点,能够手持、人员背负或者车载,在行进过程中即可完成对周围数据的采集,并且扫描过程中能够对数据进行自动拼接,大大保证了工作效率,减少拼接误差。
本次扫描选用分段扫描法,由于巷道距离较长,一次性数据采集拼接容易累积误差,影响采集数据的质量;所以选择分段扫描,最后再利用人工手段对数据进行拼接处理,减少扫描累积误差。
2.1.3 控制测量
由于扫描仪的坐标系统是独立坐标系统,为了把坐标系转换为实际地理坐标系,需要结合全站仪或者RTK进行控制测量,在扫描区域放置固定标靶,利用全站仪或者RTK等精密测绘设备获取标靶地理坐标数据,作为最后扫描数据的控制点。
标靶作为数据点云拼接和坐标配准的控制点,要分布均匀,并且要保证有足够的密度。因为扫描工作有时候要持续很长时间,所以标靶还要易于扫描和长期保存。
2.1.4 实施扫描
(1)设定起始位置。仪器扫描前需要设定仪器初始扫描位置,然后手持仪器进入巷道进行扫描,注意初始位置不要发生移动,如果移动会导致最终数据无法拼接。
(2)行走路线。根据仪器的拼接特性,行走路线要实现闭合,本工程扫描行走路线图见图6。
图6 行走路线示意图
(3)结束扫描。结束扫描时,仪器需要回到起始位置,检查扫描数据是否完整,拼接是否完成,若拼接完好数据完整则扫描结束。
2.2 内业数据处理
测量数据处理工作是工程的关键,因为数据处理的结果直接影响建模的质量,这是由测量系统不成熟决定的,往往获取的数据无法直接进行建模。因此在逆向建模之前首先要对外业采集到的数据进行预处理,目的是获得完整、正确、高质量的扫描数据以方便后面的建模工作。主要工作包括点云拼接、坐标转换、数据处理分析及数据输出。
(1)点云拼接。将单站的数据拼接成一个整体的扫描物体,常用的点云拼接方法有基于标靶的拼接方法、基于特征点的拼接方法、混合式拼接方法和基于控制点的点云拼接方法,拼接过程中需要足够的特征同名点作为数据支持。
(2)坐标转换。这项功能是为没有全局坐标的点云数据匹配全局坐标。
(3)数据处理分析。主要是对点云数据进行操作,可以实现对点云预处理以及点云的误差分析。
(4)数据输出。可以输出多种文件格式,很好地与其他软件实现交互。
2.2.1 数据拼接
笔者采用基于标靶的配准方式,由于前期在巷道内部放置了标靶,大大提高了配准精度。拼接完成后的巷道点云数据如图7所示。

图7 拼接完成后的巷道点云数据
2.2.2 坐标转换
测量时全站仪和扫描仪会分别测得标靶中心的三维坐标。在某一扫描位置上的3个标靶的情况如图7所示。分别利用扫描仪和全站仪测得标靶中心的坐标。扫描仪得到的坐标是基于扫描仪自身坐标系的,全站仪或者RTK得到的坐标数据是基于地理坐标系统全局的坐标系。
两组数据采集完成后,将扫描仪测得的点云数据导入拼接软件中,随后把全站仪得到的控制点坐标数据以TXT格式也导入到软件中,软件通过计算各标靶的空间距离、角度、相对位置,根据它们的空间位置关系确定扫描仪得到的标靶控制点和全站仪得到的标靶控制点之间的对应关系。这个对应关系确认后即可计算坐标转换矩阵,利用转换矩阵就能把所有的扫描点云的局部坐标系配准到全局坐标系中。扫描仪坐标转换工作原理图见图8。

图8 扫描仪坐标转换工作原理图
2.2.3 巷道数字化建模
将处理好的数据导入专业建模软件,进行井巷数字化建模,得到三维数字网络模型如图9所示。
图9 巷道三维数字化模型
3 三维激光扫描数据在巷道工程中的应用研究
3.1 主要巷道底板、顶板变形监测
随着矿井掘进的延伸,煤矿井下的主要巷道受采动、矿压等影响会出现变形或者遭到破坏,如果发现不及时,无法及时支护和维护,将引发严重后果。
采用三维激光扫描技术不定时地采集巷道的三维数据,建立巷道数字化模型。同时,通过对比多次扫描模型,及时对主要巷道数据进行检测分析,及时发现变化大的区域,做到早发现早修复,避免重大损失。巷道数字化模型分析图见图10,通过两次数据对比生成两次数据差异色谱图,图中绿色区域即为无偏差区域,不同的颜色会反映两次数据的不同差值。
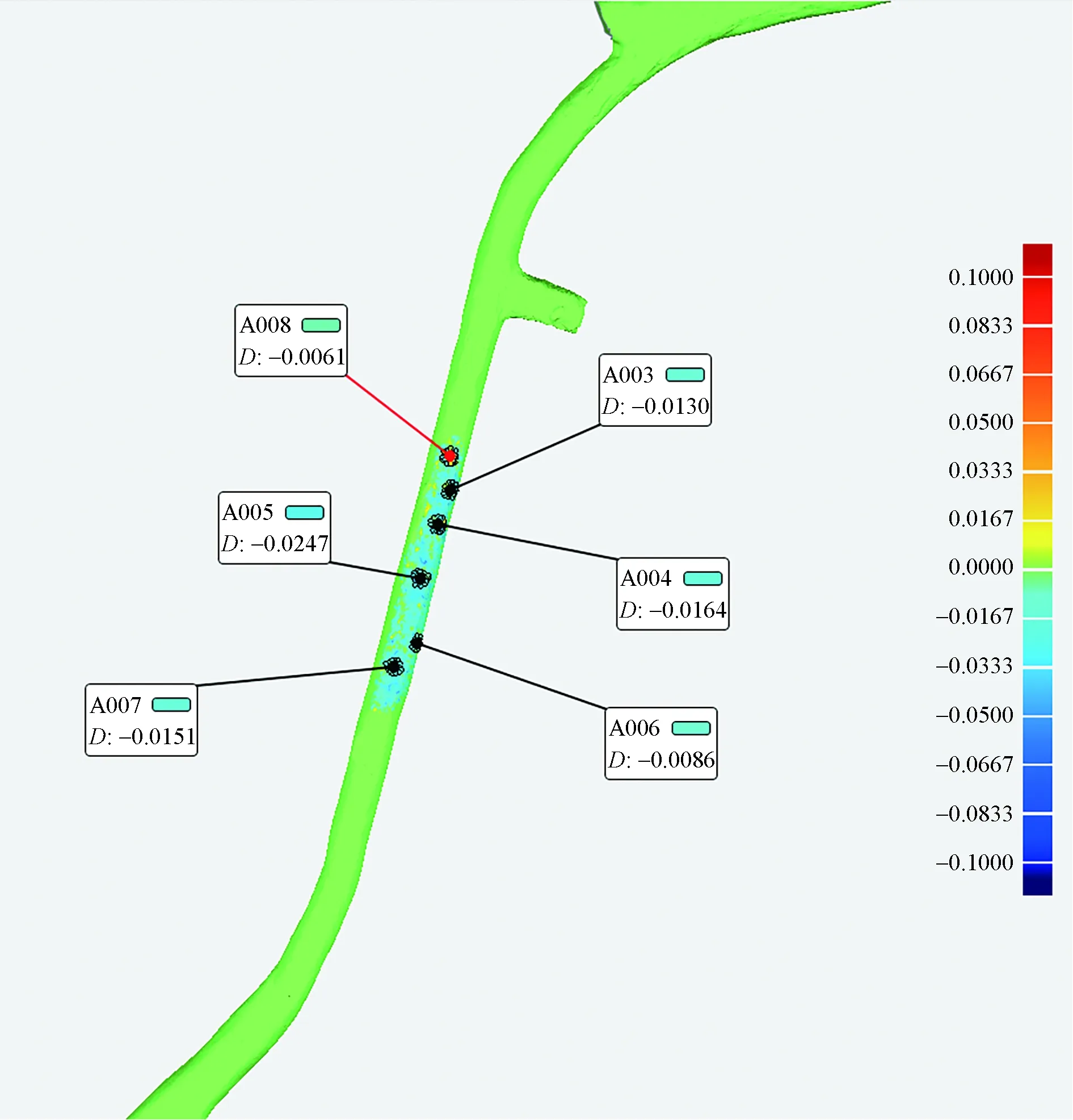
图10 巷道数字化模型分析图
3.2 巷道断面分析
通过建立井巷数字化模型,可以直接提取巷道截面,并与设计巷道截面对比,得到掘进中巷道的截面与设计截面的偏差,及时调整掘进方案。调整前后的巷道截面对比图见图11。

图11 调整前后的截面对比图
4 三维激光扫描技术在巷道变形监测中的优势及其应用展望
由以上分析可知,三维激光扫描技术在井巷工程中具有传统测绘手段不可比拟的优势。
(1)具有机动性、灵活性和安全性。手持三维激光扫描仪无需设置固定站位,只需要一名工作人员手持或者车载进行工作,小巧灵活,受环境干扰少,且为非接触测量,在工作环境复杂的巷道工程中,相较于传统单点接触设站测量的技术手段有明显的优势。
(2)采集数据速度快。传统井下测绘手段是单点测绘模式,采集数据速度慢;同样长度巷道的数据采集工作,三维激光扫描技术的效率是传统测绘手段采集数据效率的8~10倍,有绝对优势。
(3)数据采集更全面更准确。由于传统数据采集手段是单点数据采集模式,采集数据不全面,且容易受到工作环境影响,需要多名工作人员配合才能完成测绘工作;而三维激光扫描技术是多点三维测绘方式,能够获取全部巷道表面的三维点位坐标信息,数据更全面、更准确,并且巷道三维模型包含了地理信息、地区坐标系,保证了模型的尺寸和精度。
(4)数据成果利用率高。通过三维激光扫描技术得到的数据可以经过处理生成多种衍生数据,包括巷道三维模型、井巷断面图、井巷剖面图、平面图等,而且可以通过得到的巷道三维模型,进行任意位置的分析,无需重复反复测量。
利用三维激光扫描技术进行井巷工程数据测绘,可以对地下井巷数据进行快速获取并进行三维建模,获取井工矿复杂巷道的三维数字化模型,从而进一步进行巷道几何信息、截面等信息的快速提取。三维激光扫描技术测绘手段丰富了井巷工程中测绘的成果类型,大大提高了井工矿开拓过程中的工作效率,并且能够快速发现掘进过程中的安全隐患,及时进行支护修复,保证井工矿安全生产。
三维激光扫描作为一种新兴的三维数据采集技术,以其快速、高效、高精度以及海量数据采集等技术优势在各行各业都起到了至关重要的作用。这项技术具有较好的发展前景,同时也仍然存在一些技术性难题需要解决,例如三维数据中精度控制的问题,以及扫描数据的累计误差难题。相信随着科学及计算机技术的发展,在不久的将来这些难题都将被攻克,而三维激光扫描技术与逆向工程技术的完美结合也必将取得更加丰硕的科技成果。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
文萃报·周五版(2021年45期)2021-11-17
云南画报(2021年4期)2021-07-22
模具制造(2019年3期)2019-06-06
中国核电(2018年4期)2018-12-28
世界博览(2015年20期)2015-09-10
现代营销·经营版(2015年3期)2015-04-20
山东工业技术(2014年14期)2014-12-23
全球定位系统(2014年1期)2014-08-21
大地测量与地球动力学(2014年3期)2014-02-13
