基于光学捕获原理的光波粒二象性演示实验装置
2019-04-12 06:10:06刘志海
应用科学学报 2019年2期
张 敏,刘 超,刘志海,张 羽
哈尔滨工程大学理学院,哈尔滨150001
早在17世纪,牛顿和胡克就分别提出了光的粒子说与波动说,此后科学家针对光的性质展开了长达两个多世纪的辩论,直至1905年爱因斯坦提出光具有波粒二象性才为这一辩论画上句号.如今,波粒二象性的应用已涉及多种学科,包括医学、物理、化学、机械、生物、材料等,在21世纪的科学发展中具有重要意义[1-4].因此,波粒二象性的相关教学十分重要.但由于光的波粒二象性是抽象概念,光的波动性和粒子性并不容易同时体现,所以目前能同时演示波粒二象性的实验很少.
光辐射压力可以证明光具有粒子性,但由于光辐射压力非常微弱(pN量级),所以直至20世纪60年代激光的出现才促进了对光辐射压的研究.随后(约1989年后)许多研究人员将研究重心转向光镊技术及其实际应用,光镊逐渐被广泛应用于粒子的无触碰操作.文献[5]利用光辐射压实现了粒子在液体中的悬浮.文献[6]利用光镊诱捕并驱动蛋白质产生干涉.文献[7]利用光镊实现了对单个水稻分子染色体的微操纵.目前,各种各样的光镊系统已被广泛应用于科研中[8-12].但在教学方面,国内暂时只有一种教学型光镊[13],该光镊装置使用传统显微镜的高数值孔径物镜汇聚光束以捕获粒子,须以显微镜载物台带动样品池运动.本文利用光纤光镊产生的光力学效应来演示光的粒子性,光纤可三维移动以便捕获和操纵粒子.
干涉、衍射等现象可证明光具有波动性.验证光波动性的代表实验有杨氏双缝干涉实验、迈克尔逊干涉实验、马赫曾德(Mach-Zehnder)干涉实验等.文献[14]还开发了一款虚拟M-Z干涉仪的软件,可以直观地向学生展示干涉现象.
目前,光的波粒二象性演示通常基于传统的M-Z干涉方法[15-21].惠勒提出了著名的基于M-Z光路的延迟选择实验[16];2008年Dimitrova T L提出了光波粒二象性演示实验[17],所用的实验装置基于M-Z光路;文献[18]通过单光子波函数验证了波粒二象性;文献[19]通过波形和路径信息说明光同时具有波动性和粒子性,文献[20]针对传统的延迟选择实验给出了另一种更简单直接的理论解释,文献[21]利用弱测量M-Z干涉仪提高了标准M-Z干涉法同时体现波动性和粒子性的总体功率.文献[22]曾提出利用反康普顿效应体现光波粒二象性的实验.文献[23]提出了基于光子计数与单双缝衍射法验证光波粒二象性的实验装置,但以透镜和衍射缝搭建的光路并不便于集成.文献[24]提出了一种基于弹跳水滴的课堂实验,能使波粒二象性可视化,但该实验并不能直观体现或说明光具有波粒二象性.本文采用光纤端面的反射光和被捕获微粒表面的反射光产生的干涉光束进行光波动性的演示.该实验装置无需采用复杂的M-Z干涉结构,便于操作和集成.
本文提出了一种基于光镊技术的演示实验装置,可以直观地同时演示光的波动性和粒子性,弥补已有仪器须分别验证两种性质的不足,并使波粒二象性更易于理解.
1 基本原理
1.1 光的粒子性
光的辐射压力是指光照射到物体上对物体表面产生的压力,是光粒子性的典型表现.根据爱因斯坦光量子假设,光是由一个个光子(光量子)组成的,光子的能量与其频率成正比.光子具有动量,其动量p等于光子的能量E除以光速c,即

如图1(a)所示,当一束光(一群连续并且具有动量的光子)照射到物体上时,会把自身的动量传递给物体,产生稳定的压强,即为光压.1616年,德国天文学家J.开普勒用太阳光的压力来解释为什么彗星的尾巴背向太阳.之后在19世纪70年代,J.C.麦克斯韦利用电磁理论计算出了正入射到完全吸光体上的光所产生的压强,他认为光照射到物体上产生的压强是波印廷矢量S和光速c的比值.
一束光作用在物体上的实际压力F,可以用入射光的功率P和作用力的效率Q表示为

式中,n1为周围介质折射率,c为光速,P为光功率.
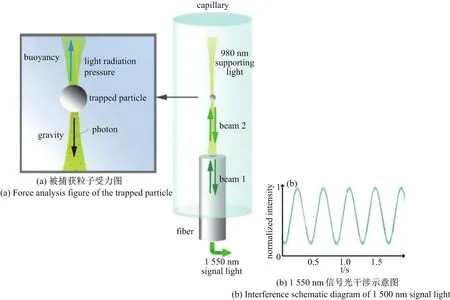
图1 原理示意图Figure 1 Schematic diagram of principle
实验原理如图1所示,图1(a)为被捕获粒子的受力分析图.纤端出射的黄色光束为980 nm捕获光束,可被认为是高斯光束.高斯光束横向对称,被捕获粒子因横向合力为零而被捕获在光纤轴线上.当横向移动光纤时,粒子相对轴线发生横向偏移,因受到指向轴线的横向梯度力作用而再度回到轴线上.因此,若横向移动光纤,被捕获的粒子将随光纤横向移动.
在轴向上,被捕获粒子受到向上的光辐射压力和浮力,同时也受到向下的重力,三力平衡则粒子稳定悬浮.没有光辐射压力时,聚苯乙烯球因其重力大于浮力而下降.若保持光源功率不变,则粒子所受光辐射压力的大小与粒子相对于光纤的位置有关.粒子距离光纤端面越近,受到的光辐射压力越大;反之则越小.因此,若仅轴向移动光纤而不改变光源功率,则粒子将在合力作用下重新回到力平衡点.具体表现为被捕获粒子随光纤轴向移动,并且粒子与纤端的间距保持不变.
当被捕获粒子处于平衡状态时,若保持光纤位置不变,降低光源输出功率,则光辐射压力减小,粒子受到向下的合力且下落;在下落的过程中,粒子逐渐靠近光纤端,在高斯光场的作用下粒子所受到的光辐射压力逐渐增大,从而再次达到受力平衡并实现悬浮.同理,调大光输出功率,粒子受到向上的合力逐渐远离光纤端,在远离的过程中受到的光辐射压力逐渐减小,同样会达到新的平衡态.即在不同的光功率下,粒子会在不同的平衡点被捕获.且光源功率越大,粒子平衡点距离端面越远.对粒子的光学捕获和位置调节可以演示光的粒子性.
1.2 光的波动性
少量光子往往表现粒子性,大量光子往往表现波动性.典型的光波动现象有光的干涉和衍射.本实验采用干涉方法证明光具有波动性,如图1所示,纤端出射的光在被捕获小球的表面被反射(反射光为beam 2),与从纤端被反射的光(beam 1)发生干涉.其光场表达式为
式中,E01为光纤探针端反射光束的振幅,E02为小球表面反射光束的振幅,v为小球的下落速度.两束光的相位差是
如图1所示,本实验装置用1 550 nm光作为信号光,在被捕获小球表面和光纤端面的两束反射光相互干涉产生干涉信号.如图1(b)所示,通过记录与测量粒子运动过程中的干涉信号可演示光的波动性.
2 实验装置
实验装置如图2所示,采用波长为980 nm的泵浦光源(THORLABSTM,CLD1015)捕获微粒,体现光的粒子性;采用波长为1 550 nm的激光束(SANTECTM,TSL-550,最大出射光功率为10 dBm,出射波长范围为1 260~1 680 nm)作为干涉信号源,体现光的波动性.1 550nm激光束由环形器②端口进入波分复用器(wavelength division multiplexer,WDM)的④端口,980 nm激光束进入到WDM的⑤端口,两束光从⑥端口共同到达光学捕获系统纤端.实验中所用光纤环形器工作波长范围是1 550±25 nm,WDM的工作波长为980/1 550 nm.

图2 实验装置系统结构图Figure 2 Structure diagram of the experimental system
粒子光学捕获系统由毛细管(内径0.5 mm,管长100 mm)、光纤及三维调节架组成.粒子溶液注入毛细管后,可通过三维调节光纤位置来对准、捕获下落的粒子.所用粒子为直径10.03µm的聚苯乙烯球.商用单模光纤(Corning,SMF-28)端面和微粒表面的反射光经环形器③端口输出至光电转换器(New FocusTM,MODEL 117,产品规格为2053-FS,探测波长范围为900~1 700 nm)和数据采集卡(National InstrumentsTM,KNI-PCI-6221(A),最大采样速率为250 kS/s),由此输入计算机进行干涉信息演示和计算.通过CCD摄像成像系统监测纤端及粒子悬浮情况,同时使用上位机软件采集实时谱线,通过计算可获得微粒的实时位置及速度信息.
3 光的波粒二象性演示实验
3.1 光的粒子性
实验装置通过三维操作聚苯乙烯小球演示光的粒子性.当单光纤光镊稳定捕获一个聚苯乙烯球后,操控光纤沿x方向左右移动.从图3中可以看出光纤端已捕获一个聚苯乙烯球.由图3(b)和3(d),可见将光纤缓慢向右移动,微粒会随光纤向右移动.这说明光纤光镊可以横向操纵被捕粒子.同样地,由图3(a)和3(b),可见操纵光纤沿y轴缓慢下降,微粒也随之向下移动.粒子与纤端间距保持不变.这说明光纤光镊可以纵向操纵捕获的粒子.
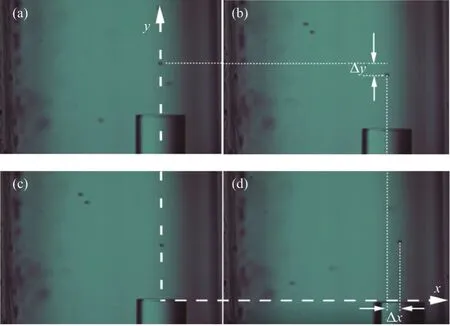
图3 单光纤光镊横纵向操纵被捕粒子.(a)(c)纤端捕获粒子截图;(b)y方向移动粒子截图;(d)x方向移动粒子截图Figure 3 Horizontally and vertically operations of the trapped particle.(a)(c)Image of the trapped particle;(b)Image of the moved particle in y direction;(d)Image of the moved particle in x direction
当单光纤光镊稳定捕获一个小球后,改变980 nm光源输出功率,小球的平衡位置会随光强变化.如图4所示,若增大980 nm光功率,则粒子将被捕获在远离探针的位置.这是因为增大光强会增大小球受到的光辐射压力,使得光辐射压力、小球所受的重力和浮力的合力方向向上,从而使小球向上运动.相应地,若减小光功率,小球的被捕获位置将靠近光纤端面,实验表明,纤端出射光对粒子有辐射压力,说明光具有粒子性.
3.2 光的波动性
从光纤端输出的信号光(1 550 nm)分别在被捕获的聚苯乙烯球表面和光纤端面被反射,两束反射光发生干涉,根据干涉信号可计算得出被捕获小球的速度,实验结果如图5所示.干涉信号只能体现小球的运动速度,但不能体现其运动方向,结合CCD图像可获取其全部运动信息.被捕获小球稳定悬浮在适当位置时,关闭980 nm光并开始采集干涉信号,小球下落且速度逐渐增大.取小球下落至靠近端面处为零时刻,如图5(a)所示.小球完全落到光纤端面处时,速度降为零,如图5(b)所示.增大980 nm光功率,小球因受到的合力向上而向上发射,如图5(c)所示.
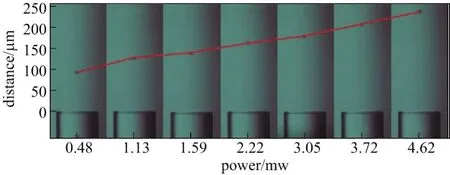
图4 不同光强下小球平衡位置变化图Figure 4 Different equilibrium points under different supporting light power
根据干涉公式(4),可以通过检测光强度信号来测量粒子运动速度,运动速度正比于干涉信号的频率.干涉信号频率越低,微粒运动速度越小;干涉信号频率越高,微粒运动速度越快.从图5(d)的谱线可以看出,干涉信号频率在粒子下落过程中有所降低,这说明粒子运动速度在下降过程中逐渐减小.这是因粒子在靠近光纤端面的过程中,所受到的光辐射压力(阻力)不断增大引起的.相应地,干涉信号频率在粒子上升过程中增大,说明了粒子运动速度在上升过程中逐渐增加.粒子受到了较大的光辐射压力作用(推力),因此做加速运动远离光纤端面,并将在一定位置达到最大速度.

图5 双端面反射光束干涉波形.(a)粒子靠近光纤端截图;(b)粒子在光纤端停止截图;(c)粒子远离光纤端截图;(d)双端面反射光束干涉波形Figure 5 Interference waveforms of the two reflected beams.(a)Image of particle moving towards the fiber tip;(b)Image of particle stop on the fiber tip;(c)Image of particle moving far away from the fiber tip;(d)Interference waveforms of the two reflected beams
本实验中使用波长为1 550 nm的探测激光器,小球的速度可以表示为

式中,n为t时间间隔内的干涉条纹数量.
小球的速度-时间曲线如图6所示,其中橘色曲线依据所录视频求得,蓝色曲线由干涉谱线计算所得.通过曲线可以看出粒子速度先减小后增大,这与图5中谱线先变稀疏后变密集相对应.
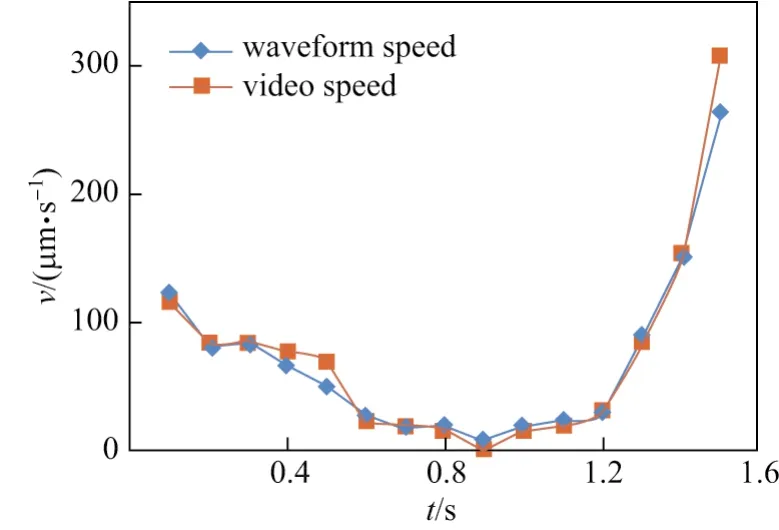
图6 小球运动速度—时间曲线Figure 6 Speed-time curve of the trapped polystyrene ball
4 结语
本实验装置基于光镊理论,通过一个简单的光纤光镊实现了对粒子运动状态的操控,改变了传统基于M-Z干涉光路的光波粒二象性演示方法.基于光辐射压理论及干涉理论,实验直观形象地展示了光的波动性和粒子性,具有较好的演示效果.本实验装置采用光纤作为光束的载体,与传统基于空间光路的实验装置相比,具有成本低、体积小、集成度较高的优点.
猜你喜欢
激光技术(2024年1期)2024-04-03 12:09:02
奥秘(2021年3期)2021-04-12 15:10:26
安徽农业科学(2019年11期)2019-07-10 09:29:59
照明工程学报(2019年2期)2019-05-21 06:45:40
照明工程学报(2019年2期)2019-05-21 06:42:34
照明工程学报(2018年2期)2018-05-09 00:26:22
中央民族大学学报(自然科学版)(2017年1期)2017-06-11 07:13:38
中国管理信息化(2016年21期)2016-12-27 14:33:56
光学精密工程(2016年6期)2016-11-07 09:08:16
商场现代化(2016年3期)2016-04-08 22:46:48