基于遗传算法的变幅液压系统动态特性优化
2019-04-08 02:14:04王志红卢梦成尹冬冬
数字制造科学 2019年1期
王志红,卢梦成,尹冬冬,秦 可
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉 430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070)
高空作业车是运送工作人员和使用器材到现场并进行空中作业的专用车辆[1]。高空作业车变幅动作的平稳性直接影响高空作业车工作时的安全性以及相关液压元件的使用寿命,并且变幅液压系统中的平衡阀是影响系统平稳性的一个重要液压元件[2]。新开发的一款伸缩臂式高空作业车,其结构简图如图1所示。以变幅液压系统为研究对象,基于AMESim系统建模和仿真软件建立了变幅液压系统仿真模型,通过仿真方法研究系统相关参数对变幅液压系统动态特性的影响,并对系统进行优化。

图1 高空作业车结构简图
1 高空作业车变幅液压系统
高空作业车的变幅液压系统主要由变幅液压缸、平衡阀、电磁换向阀等组成。由于高空作业车对安全性以及稳定性要求较高,因此液压回路中采用双向平衡阀,以提高高空作业车工作臂变幅动作的可靠性,同时提高变幅液压缸运动的稳定性;电磁换向阀中位采取Y型,在变幅液压系统不工作时,使变幅液压缸驱动腔卸荷,避免平衡阀被驱动腔中封闭的压力开启,从而导致变幅液压缸回缩的现象,变幅液压系统原理如图2所示。
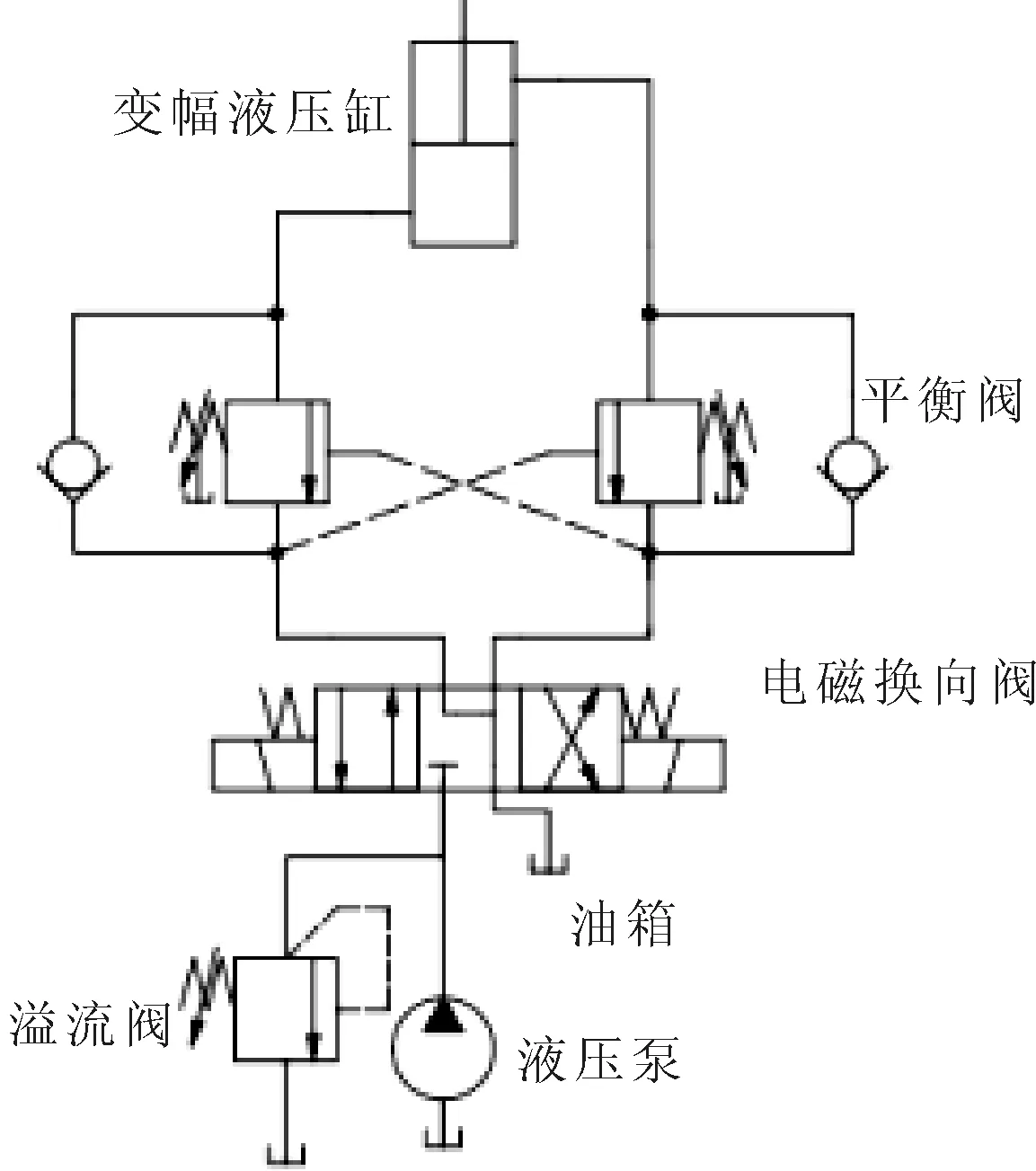
图2 变幅液压系统
2 平衡阀工作原理
高空作业车变幅液压系统平衡阀采用的是布赫Cindy系列平衡阀,该平衡阀常用于挖掘机、起重机等工程机械的动臂、多级缸的控制[3]。平衡阀结构如图3所示,其主要有负载保持功能、单向功能和液控节流等功能。
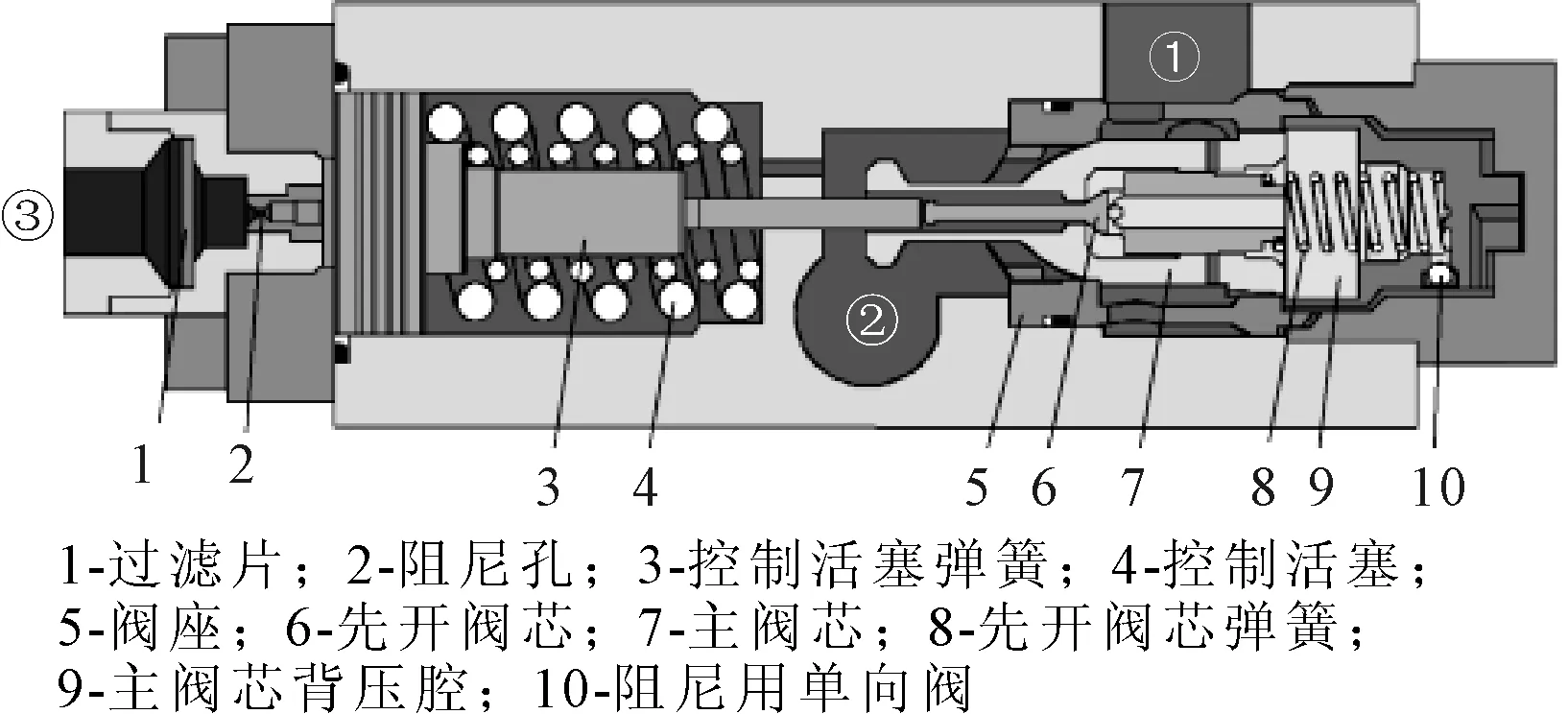
图3 布赫平衡阀结构图
(1)负载保持功能。压力油从口①流入主阀芯的背压腔,主阀芯和先开阀芯一起向左移动并压在阀座上。口①和口②没有连通,因此口①和口②无压力,此时具有负载保持功能。
(2)单向功能。压力油从口②进入并作用于先开阀芯和主阀芯上,主阀芯和先开阀芯一起向右移动,当其克服先开阀芯弹簧预紧力后离开阀座,因此压力油从口②流向口①,通道2-1导通。
(3)液控节流功能。压力油从口③进入,通过过滤片以及阻尼孔,并作用在控制活塞左端的大面积上。当作用力克服弹簧的预紧力后,使得控制活塞向右移动。控制活塞带动先开阀芯向右移动,从而克服控制活塞弹簧的预紧力。使得主阀芯背压腔先后经过先开阀芯中的小孔、先开阀芯与主阀芯之间的节流口,回油通道连通,因此压力下降。主阀芯在压差的作用下向右移动,通道1-2开口增大。
3 变幅系统动态特性仿真
液压系统的动态特性是指液压系统由失去原来的平衡状态达到新的平衡状态过程中所表现出来的特性。液压系统达到新的平衡状态时,各参数量的变化速率是衡量液压系统稳定性的重要指标。笔者主要以变幅液压缸活塞杆加速度的变化评价变幅液压系统稳定性。
AMESim是法国IMAGINE公司推出的一款可用于流体动力、机械、热流体和控制系统仿真分析的软件。AMESim采用基于物理模型的图形化建模方式,为用户提供了丰富的元件应用库[4]。通过AMESim软件进行建模时,可根据变幅液压系统原理图,在保证性能要求的情况下能够适当简化建模,在 AMESim 的液压、机械、信号库中通过选择相应的元件模型构建出变幅液压系统回路的仿真模型,并对每个元件选取子模型[5]。AMESim 液压中的电磁阀可以作为伺服阀、比例阀和换向阀用,根据液压系统实际情况本仿真模型中需要一个电磁换向阀。模型中的电磁换向阀都是通过输入的控制信号改变液压油流向,信号为阶跃信号[6]。
在建模时将液压系统的管道假设为刚性,没有考虑管道的长度[7]。液压元件设计库功能模块可以根据几何形状以及物理特性详细构建各种液压元件[8],在 AMESim 中运用液压元件设计库建立的变幅液压系统仿真模型如图4所示。
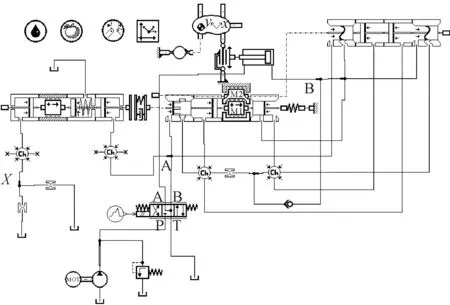
图4 变幅液压系统仿真模型
3.1 模型的参数设置
在AMESim参数模式中设置所有的液压元件参数,表1中列出了主要的液压元件参数。
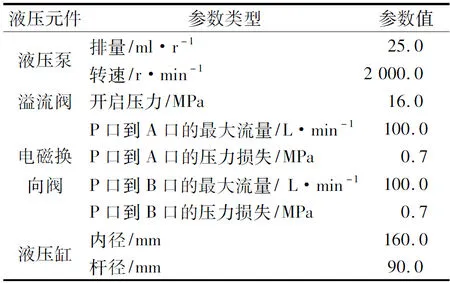
表1 主要液压元件仿真参数
根据高空作业车工作装置实际运动过程对变幅液压系统进行信号源参数设置。假设变幅液压缸活塞杆向外伸出10 s后停止;然后液压缸保持静止5 s;最后液压缸活塞杆缩回10 s后停止。模拟高空作业车变幅起升,然后保持静止,最后变幅下降的经典工况。按照运动过程设置电磁换向阀的信号源如图5所示。
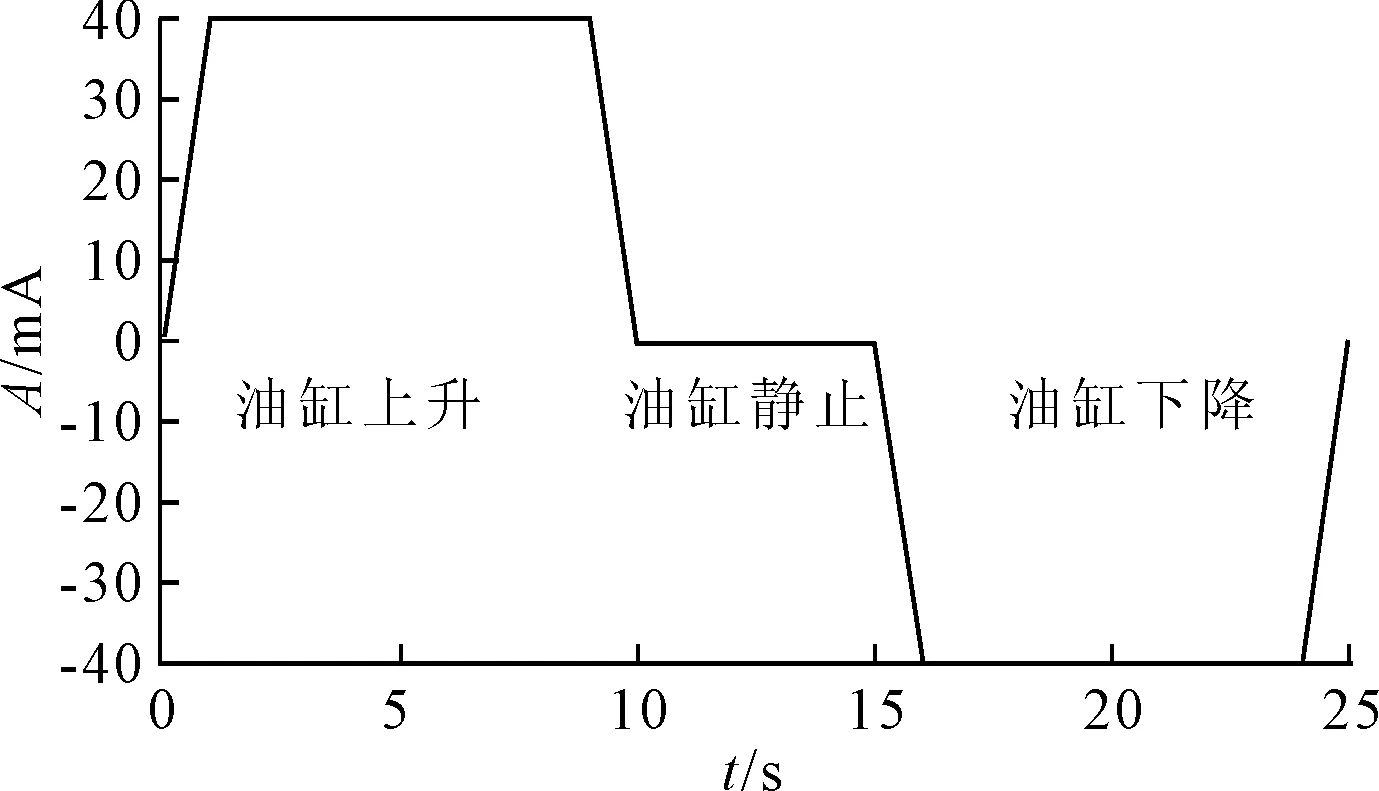
图5 信号源参数
3.2 仿真结果分析
(1)泵转速的影响。高空作业车变幅液压系统是在恒定的泵转速下工作,但是在变幅作业之前可以通过调节油门控制泵转速。图6是泵转速为2 000 r/min、2 500 r/min以及3 000 r/min时变幅液压缸活塞杆加速度响应曲线, 由图6可以看出,在变幅液压缸活塞杆的伸出运动阶段末期、静止阶段以及缩回运动阶段末期时,变幅液压缸活塞杆加速度的波动较大,并且随着液压泵转速的增大,变幅液压缸活塞杆的加速度波动呈现先增大后减小的趋势。
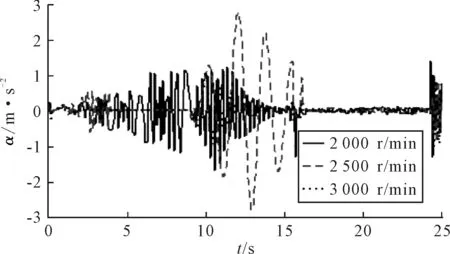
图6 不同泵转速时活塞杆加速度响应曲线
(2)系统压力的影响。图7是系统压力为16 MPa、19 MPa和21 MPa时系统压力对活塞杆加速度的响应曲线,由图7可以看出,在变幅液压缸活塞杆的伸出运动阶段、静止阶段前期以及缩回运动阶段末期时,变幅液压缸活塞杆加速度的波动较大,并且系统压力越大,变幅液压缸活塞杆加速度波动越小,变幅液压系统平稳性越好。
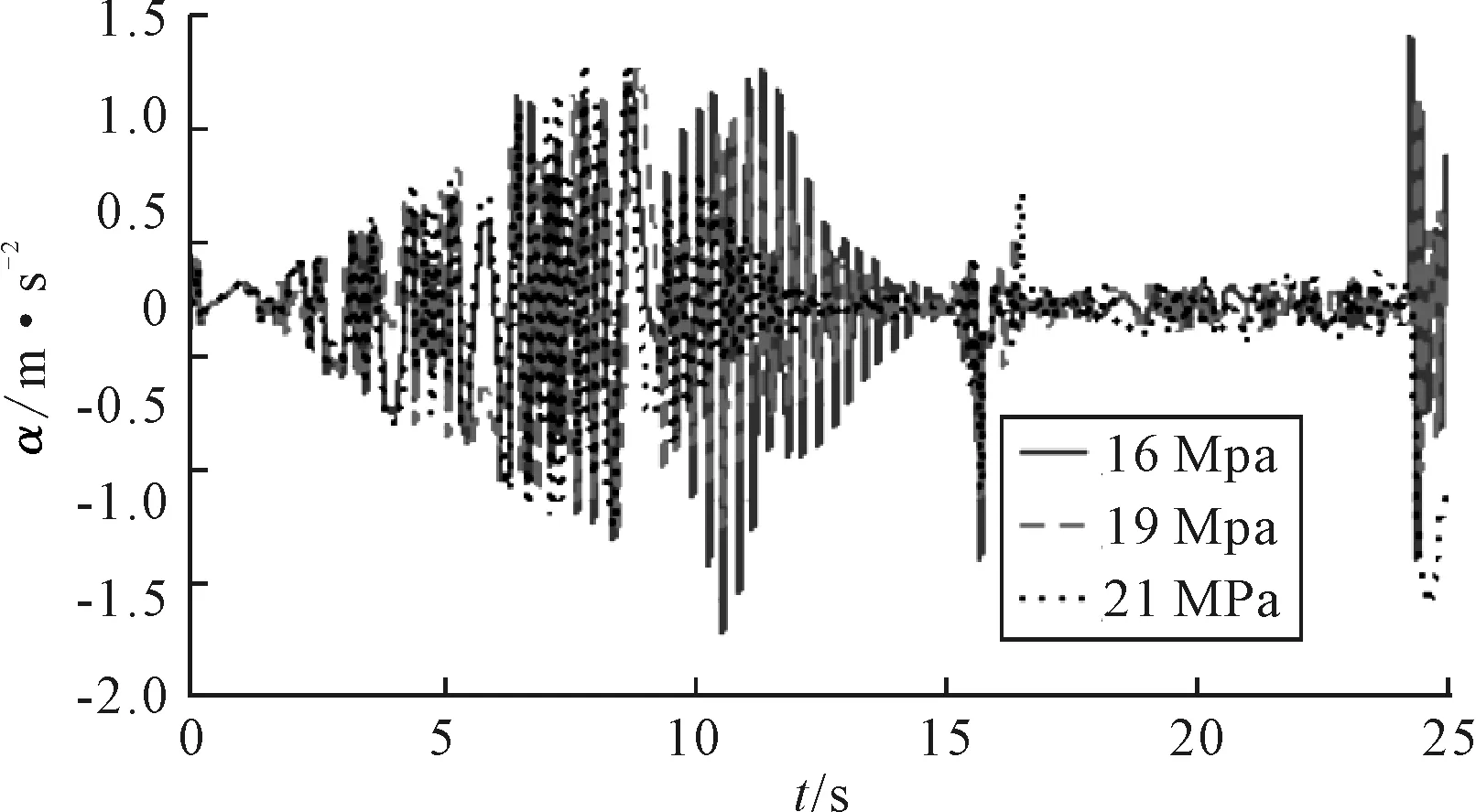
图7 不同系统压力时活塞杆加速度响应曲线
(3)主阀芯弹簧刚度的影响。图8是主阀芯弹簧刚度为100 N/mm、150 N/mm和200 N/mm时主阀芯弹簧刚度对活塞杆加速度的响应曲线,由图8可以看出,在变幅液压缸的伸出运动阶段前期、静止阶段以及缩回运动阶段末期时,变幅液压缸活塞杆加速度的波动较大,并且平衡阀的主阀芯弹簧刚度越大,变幅液压缸活塞杆的加速度波动越大,变幅液压系统的平稳性越差。
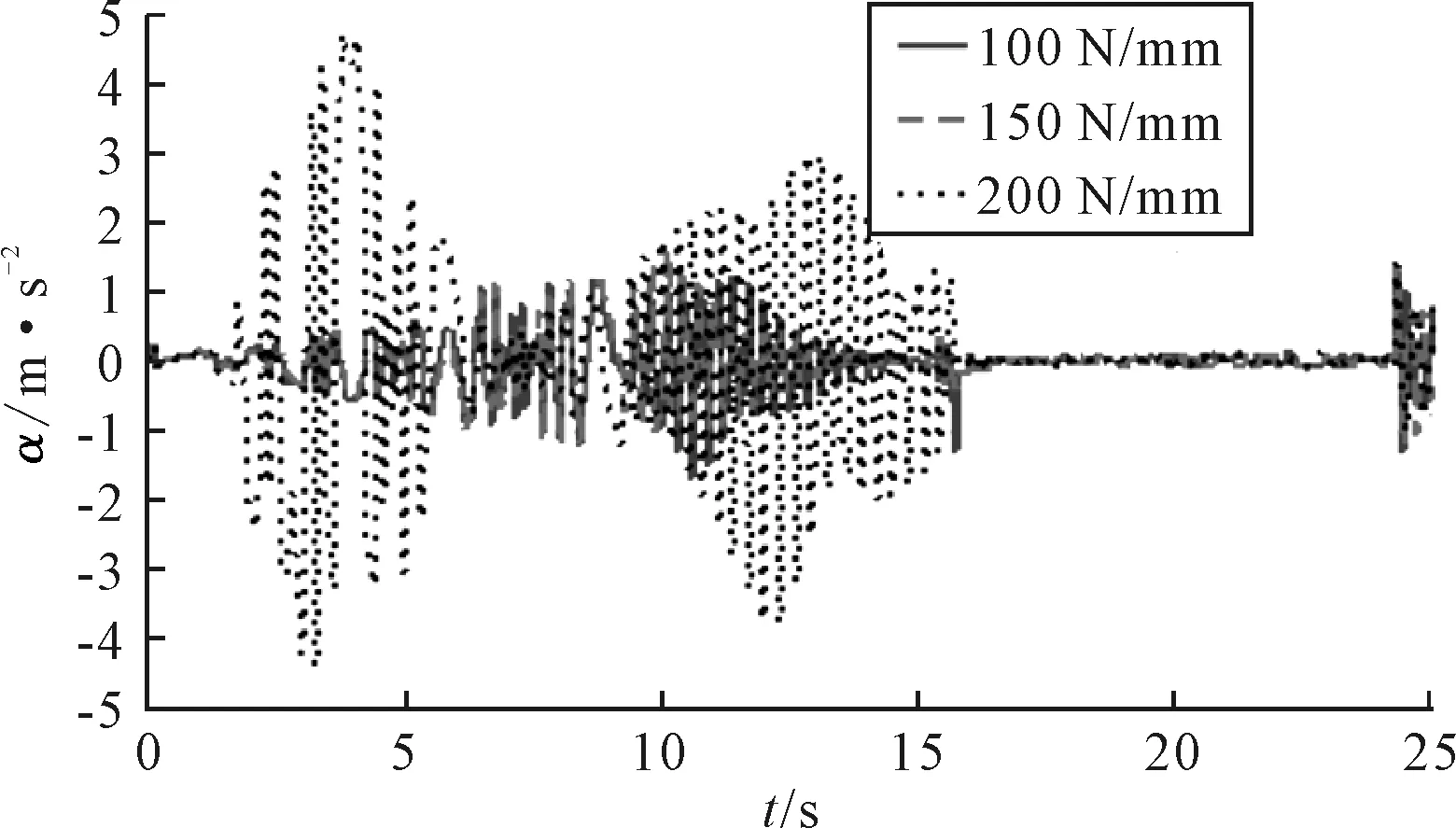
图8 不同主阀芯弹簧刚度时活塞杆加速度响应曲线
(4)控制口阻尼孔直径。图9是控制口阻尼孔直径为0.6 mm、0.8 mm和1.0 mm时变幅液压缸活塞杆加速度的响应曲线,由图9可以看出,在变幅液压缸活塞杆伸出运动阶段、静止阶段以及缩回运动阶段末期时,变幅液压缸活塞杆加速度的波动较大,并且平衡阀的控制口阻尼孔直径越大,变幅液压缸活塞杆的加速度波动越大,变幅液压系统的平稳性越差。
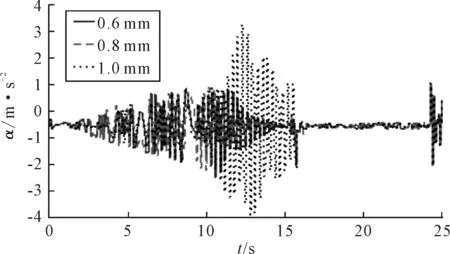
图9 不同阻尼孔直径时活塞杆加速度响应曲线
4 变幅液压系统动态特性优化
以高空作业车的变幅液压系统动态特性仿真模型为基础,以提高高空作业车的变幅液压系统稳定性为目标,对高空作业车的变幅液压系统动态性能进行优化。
4.1 优化算法
在AMESim软件中的Design Exploration功能模块中提供了两种优化算法:NLPQL(nonliear quadratic programming algorithm)和遗传算法。NLPQL是利用顺序二次规划(sequential quadratio programming,SQP)的算法,SQP是一种利用目标函数和约束条件的梯度来解决非线性优化问题的方法。由于NLPQL使用的是梯度概念,因此不适用于离散参数的优化。该方法的特点是一旦找到一个局部最小值优化即停止,因此,给定的初始值对获得的优化结果起到很重要的作用。
遗传算法是一种模仿生物进化过程的优化方法,它通过将问题的求解表示为自然进化中适者生存的过程来求得问题的最优解。AMESim软件中遗传算法的运行过程是首先随机地生成一个种群,保留最好的个体,淘汰其他的个体;然后随机地挑选最好的个体作为父代交叉从而获得这些个体的子代,并且选择接近于父代的参数。个体也会有一定的概率变异,它们的参数值可以进行改变。最后,经过若干次迭代后,个体将收敛至一个或数个最优解[9]。
4.2 优化步骤
(1)根据优化目的,确定优化目标。为了提示高空作业车的变幅液压系统稳定性,根据变幅液压系统的动态特性仿真结果选取泵转速、系统压力、平衡阀主阀芯弹簧刚度和控制口阻尼孔直径作为优化对象,将高空作业车的变幅液压系统中变幅液压缸活塞杆的运动加速度均方根值作为优化目标以表征变幅液压系统的稳定性。
(2)确定设计变量以及约束条件。在AMESim软件中打开Export setup功能模块,分别在Input Parameters(输入参数)和Simple Output Parameters(简单输入参数)中设置输入和输出变量。根据高空作业车的变幅液压系统动态特性的仿真结果选取泵转速、系统压力、平衡阀主阀芯弹簧刚度和控制口阻尼孔直径作为输入参数,将变幅液压系统中变幅液压缸活塞杆的运动加速度作为输出参数,以变幅液压系统动态特性批运行的仿真结果设置约束条件,变幅液压系统的设计变量如表2所示。
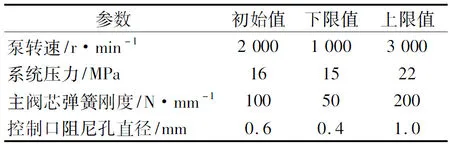
表2 设计变量
(3)定义优化过程。在AMESim软件运行模式中打开Design Exploration(设计探索)模块,按照所设计的参数变量及约束条件创建优化过程,选择遗传算法作为优化方法,遗传算法参数设置如表3所示。
4.3 优化结果分析
利用AMESim软件设计探索模块中的优化工具Optimization中的遗传算法对高空作业车的变幅液压系统动态特性进行优化,初始种群生成后进行迭代计算,在经过20代进化后,满足结束条件,优化计算结束,最终通过计算输出各参数的最优解,优化前后的结果对比如表4所示。

表3 遗传算法参数设置
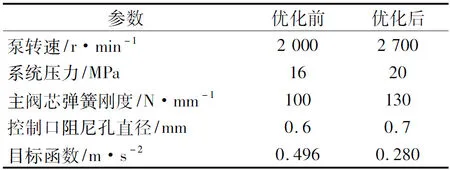
表4 变幅液压系统动态特性参数优化前后对比
将通过遗传算法得到的变幅液压系统动态特性的优化参数应用到变幅液压系统的动态特性仿真模型中,获得优化前后变幅液压缸的活塞杆加速度响应曲线如图10所示。
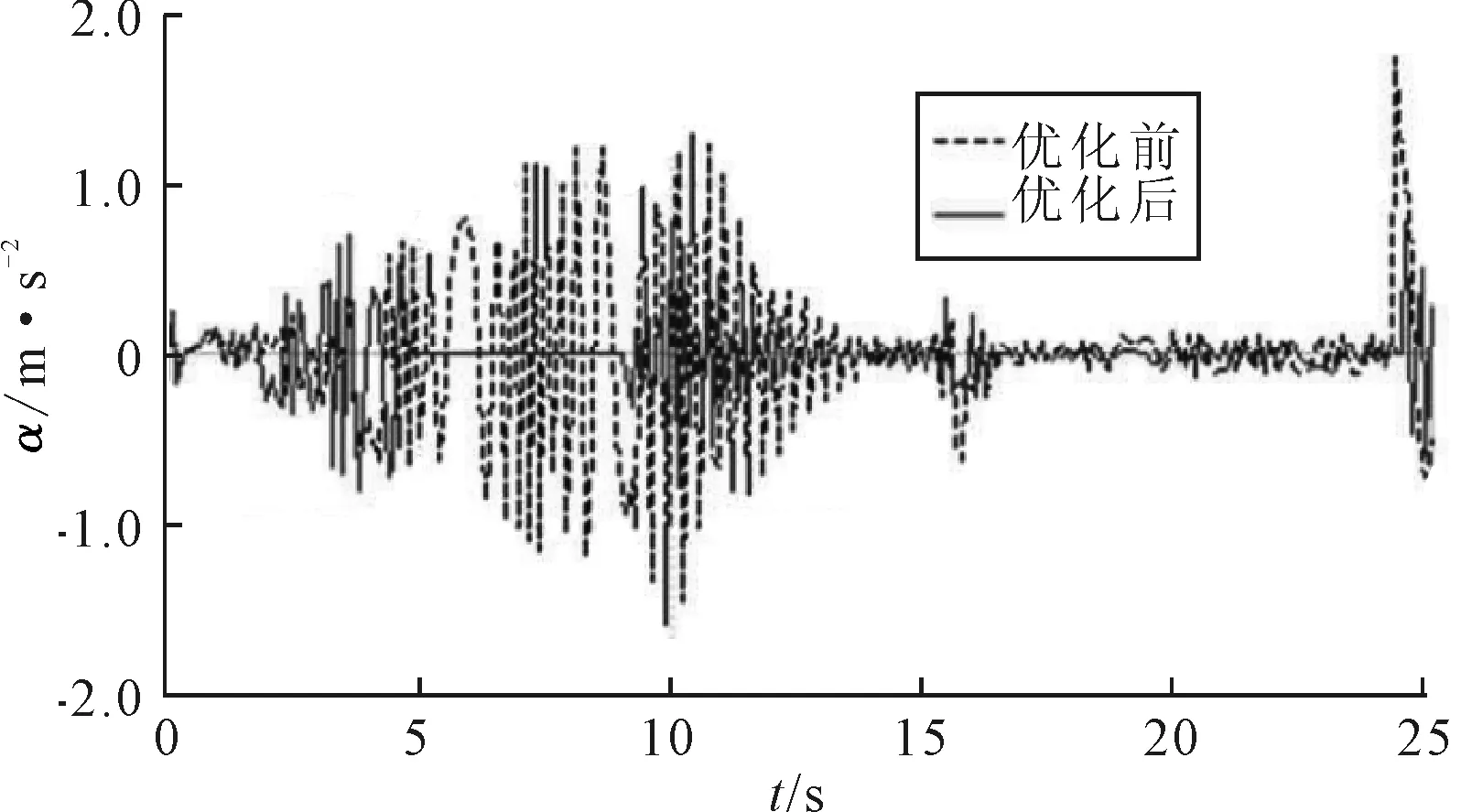
图10 优化前后变幅液压缸活塞杆加速度响应曲线
由图10可知,在变幅液压缸活塞杆的伸出运动阶段、静止阶段以及缩回运动阶段末期时,变幅液压系统参数经过优化后的变幅液压缸活塞杆加速度的波动明显减小,优化前的变幅液压缸活塞杆的加速度峰值为1.5 m/s2左右,优化后的变幅液压缸活塞杆的加速度峰值为0.8 m/s2左右。由表4可知,通过遗传算法优化后,变幅液压缸活塞杆的加速度均方根值减少了43.5%,优化效果明显。
5 结论
(1)分析了高空作业车变幅液压系统以及平衡阀工作原理,并基于AMESim建立了高空作业车变幅液压系统仿真模型,通过批运行分析了相关参数的变化对变幅液压系统动态特性的影响。
(2)由仿真结果可知,泵的转速越大,活塞杆的加速度波动越大,系统平稳性越差;系统压力越大,活塞杆的加速度波动越小,系统平稳性越好;平衡阀主阀芯弹簧刚度及控制口阻尼孔直径越大,活塞杆加速度波动越大,系统平稳性越差。
(3)基于遗传算法对影响变幅液压系统动态特性的参数进行优化,得到了变幅液压系统的最优参数,仿真结果表明,优化后变幅液压缸活塞杆的加速度均方根值减少了43.5%,优化效果明显,对变幅液压系统的优化设计提供了一定的参考。
猜你喜欢
露天采矿技术(2021年1期)2021-03-07 07:56:14
建筑机械(2020年7期)2020-08-05 10:09:22
水电站机电技术(2020年3期)2020-04-28 10:27:56
装备制造技术(2019年8期)2019-10-23 07:29:14
电子制作(2018年19期)2018-11-14 02:36:42
汽车文摘(2017年2期)2017-12-04 16:12:57
工业设计(2016年6期)2016-04-17 06:42:51
筑路机械与施工机械化(2015年1期)2015-09-18 12:16:11
液压与气动(2015年2期)2015-04-16 08:51:21
建筑机械化(2015年7期)2015-01-03 08:08:58