基于β粒子源的空腔式粉尘传感器研究
2019-04-08 07:17:40曹洪伯宋春祥姚泽恩
同位素 2019年2期
高 山,葛 良,曹洪伯,张 东,宋春祥,曹 磊,姚泽恩
(1.兰州大学 核科学与技术学院,甘肃 兰州 730000;2.霸州市地海云天环保科技有限公司,廊坊 065700;3.北京市化工职业病防治院,北京 100093)
环境保护是现代工业化健康、高速发展的重要内容。鉴于我国大气污染防治的严峻形势,环境排放标准愈加严格,对仪器设备和监测方法提出了更高要求。如何实现监测数据的实时、连续测量及科学分析,成为现代粉尘监测技术的重点和难点。目前,固定污染源重要来源之一的管道烟尘,其浓度监测技术发展较为成熟的方法包括:滤膜称重法、光散射和光吸收法、震荡天平法等[1]。管道中气流速率与烟尘浓度处于不断变化过程,滤膜称重法为达到等速采样的要求,需通过调节抽气泵控制采样流量,存在严重的滞后效应,样品需在特定实验室进行分析处理;同时,测量结果是时间累积后的平均值,无法完成现场实时、连续监测要求,现场应用受到方法原理的限制。光散射和光吸收法、振荡天平法简单易行,也可实现在线实时测量,但测量结果受颗粒物形状、粒径、材质等因素影响较大,测量可靠性较差。针对现有粉尘实时监测技术的主要缺陷,本研究借鉴气体电离室和离子收集检测器的基本原理[2],研究设计了一种基于β粒子源的被动空腔式粉尘传感器,初步探索将β粒子源用于无动力粉尘传感器的可行性。
1 基本原理
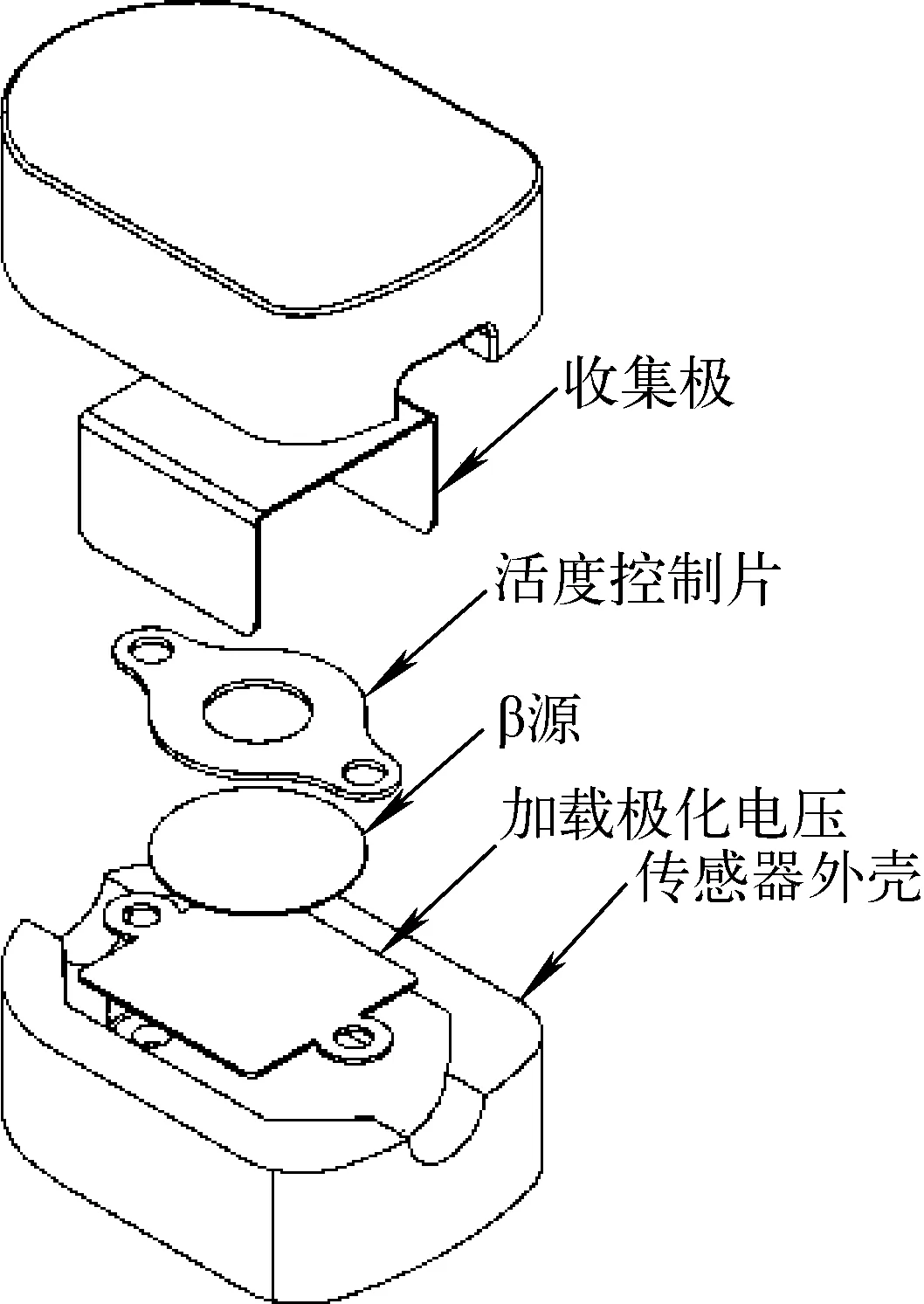
图1 传感器结构Fig.1 The structure of the sensor
传感器结构示于图1,β源与收集极(阳极)之间的空间称为测量腔,对测量腔空间加载负电压(极化电压)。β源因放射性衰变不断发射具有一定动能的电子,电子向收集极运动过程中与测量腔内的介质(主要为空气)原子发生相互作用(电离和激发、轫致辐射、弹性散射等),由于电子具有的动能远大于电离空气所需要的能量,因此在测量腔内产生大量的正、负离子。电子受腔内电场驱动向收集极漂移并被接收,正离子则向反向运动。电极上的感生电荷随负离子和正离子的漂移而变化,在输出回路中形成电流[3]。当进入传感器的气流中含有粉尘等物质时,腔内的部分离子将“吸附”于粉尘[4],测定离子流变化特征与待测量等的定量关系可反映粉尘浓度的变化。
2 传感器结构设计
传感器结构设计包括利用流场模拟优化传感器结构(主要为进气口特征),并通过实验优化选择放射源活度、源-收集极间距、极化电压。在给定的传感器结构参数以及外界环境条件下,测量腔内离子流的密度是恒值,即可认为传感器具有稳定离子流(本底信号),对应其为信号输出量。
传感器的结构设计直接影响含尘气流在其内部的运动状态,传感器轴向与气流方向一致时,进入传感器的气流速率与测试点的气流速率相等,符合烟尘采样器的等速原理[5]。根据不可压缩流的连续性方程可知,不同进气口大小对应的传感器内气体流速不同[6]。传感器的进气口扩张段特征直接影响传感器内部流场的稳定性,传感器内粉尘的运动轨迹取决于气相流场特性,稳定传感器内部流场有利于减小输出信号的波动。
源-收集极间距与采用的放射源种类、传感器结构设计有关。通常情况下,α粒子在介质中射程极短,不利于传感器结构设计,γ射线穿透能力太强,不利于防护,宜优先选用β粒子。加载极化电压使测量腔内形成稳定定向电场,驱动正、负离子被电极收集。当极化电压较小时,正、负离子的漂移速度较小,扩散和复合效应起主要作用,电极上收集到的离子数量也较少,本底信号较小。另一方面,较低能量的电子“吸附”几率较大,无电场时自由电子的能量最低,电子“吸附”几率最高。因此应综合各因素的影响优化选择极化电压。
3 传感器内部流场模拟
传感器的结构设计直接影响含尘气流在传感器内部的流动状态。紊乱的气流将导致颗粒物在传感器内部杂乱运动与滞留,加剧输出信号的统计涨落。针对传感器的平板型结构,利用软件ANSYS fluent15.0模拟气流在传感器内部的运动,根据模拟结果优化传感器结构,改善其内部流场。
3.1 三维模型与求解参数
传感器的内流计算域示于图2。结合数学模型以及fluent数值模拟方法[7-8],对数学模型及边界条件参数设定列于表1。
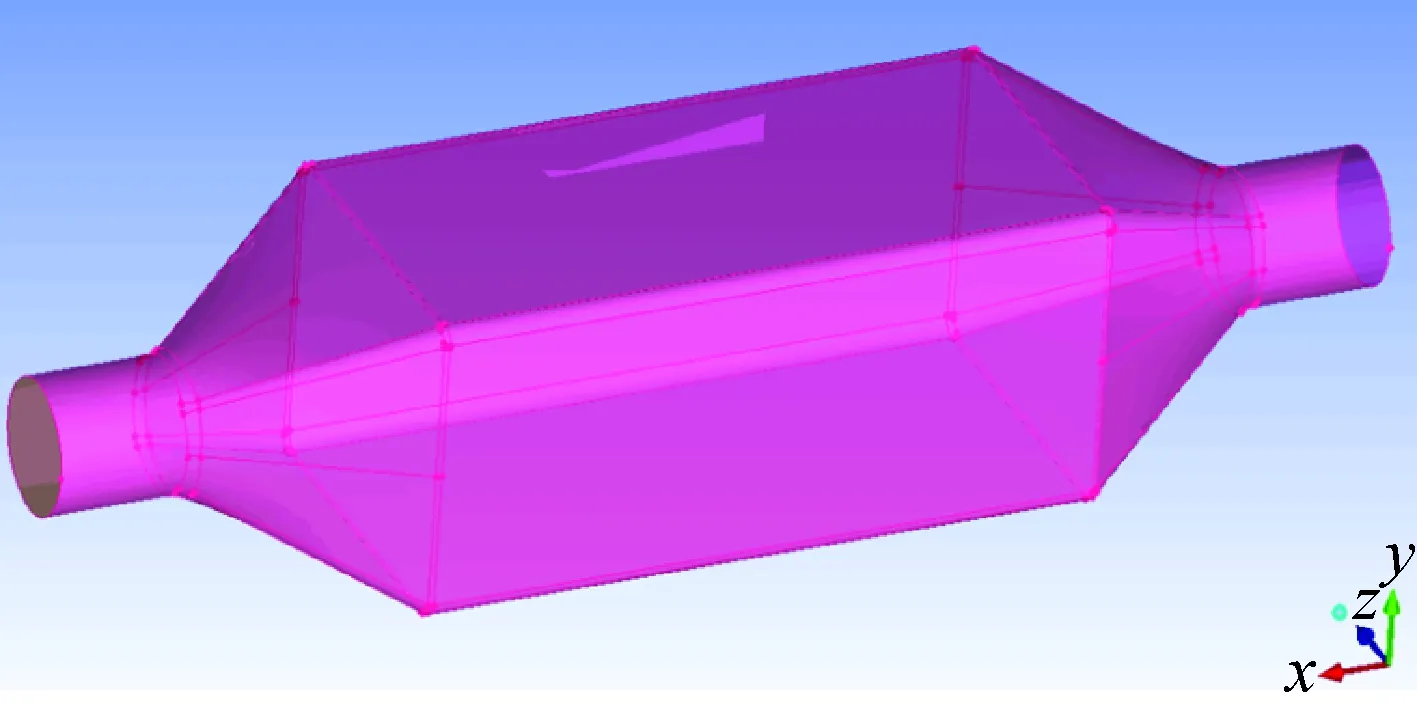
图2 传感器的内流计算域Fig.2 The internal flow field of the sensor
边界条件参数设定求解器分离式求解器湍流模型k-ε两方程模型入口边界类型速度入口入口速度/(m·s-1)3/8水力直径/m0.008湍流强度5.2%出口边界类型自由出口

图3 传感器内部流场Fig.3 The air flow inside the sensor
3.2 模拟结果与分析
传感器内部流场模拟结果示于图3。由图3结果可知,气流经过进气口扩张段后出现回流、二次环流。由于传感器进气口扩张段为直线扩张且扩张角较大,气流在扩张段发生壁面边界层转捩与分离,产生大尺度二次流,造成传感器内流场不稳定。因此,传感器进气口扩张段应采用平缓圆滑扩张曲线且扩张角<15°,将有利于传感器内流场稳定。将传感器进气口扩张段变为圆滑扩张曲线且扩张角为12°,并将中部平板段及出气口收缩段进行圆滑处理,模拟结果示于图4。由图4结果可知,传感器的结构经过优化后,其内部流场趋于稳定。
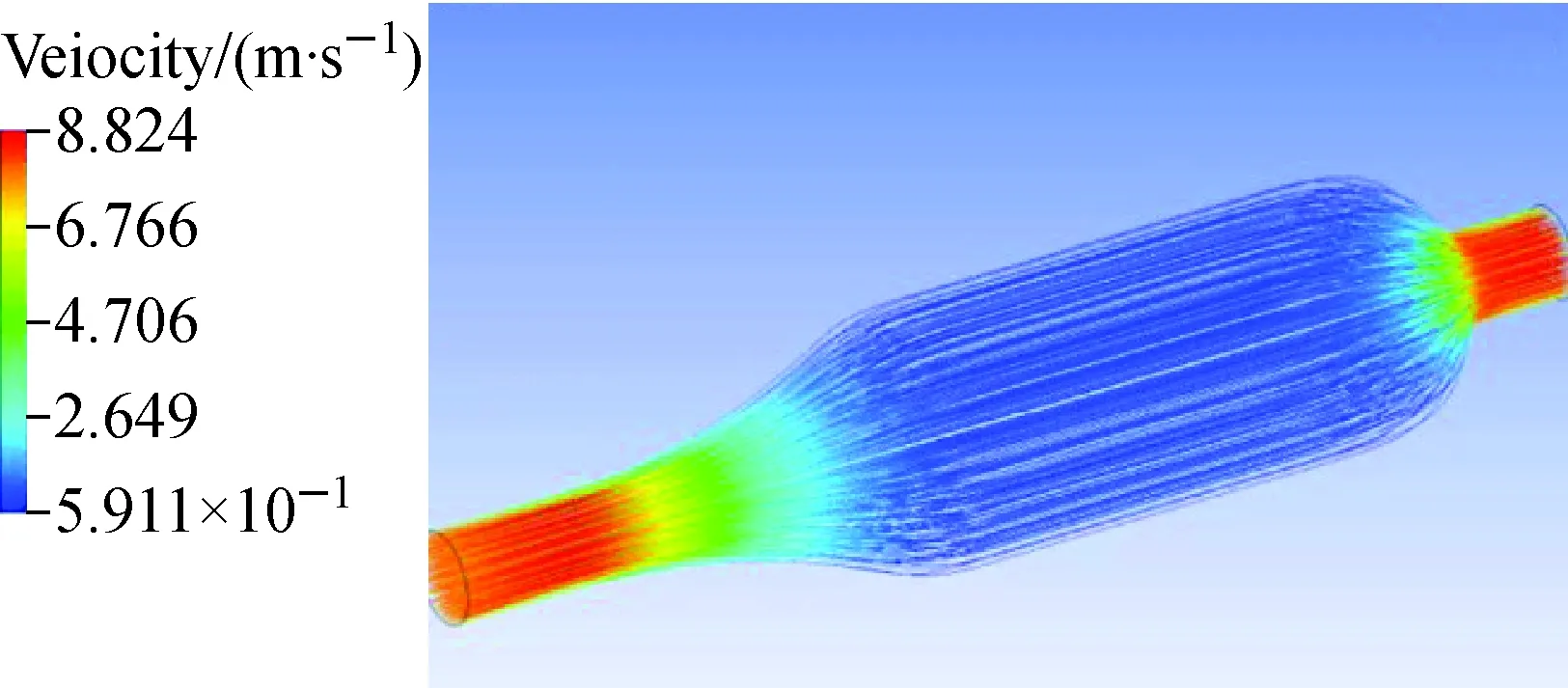
图4 改善后的流场Fig.4 The improved air flow inside the sensor
4 实验研究
4.1 影响因素研究
4.1.1放射源活度、源-收集极间距
在静态无风、不同β源活度(源直径:Φ16 mm、Φ8 mm)、不同源-收集极间距(1.5 cm、2 cm、2.5 cm)条件下,观察输出电压信号随极化电压的变化情况,优化选择放射源活度、源-收集极间距。其中,β源选取圆板型Ni-63源(β射线最大能量为65.87 keV),活度为8.88×107Bq、直径为16 mm,在β源上覆盖活度控制片可将β源有效直径减小为8 mm,如图1所示。在β源一侧加载负的直流极化电压,阳极输出电流经过2×109Ω的高电阻后转换为电压信号。收集极采用20 mm×20 mm金属片。
4.1.2进气口大小
使用自制直立式低速环形风洞改变风洞内风速,研究不同风速、不同进气口大小(圆形进气口直径:Φ15 mm、Φ8 mm)对传感器输出信号的影响,优化选择传感器的进气口大小。风洞内测试点处温度为34~38 ℃、含湿量为1%~2%、风速调节范围为5~15 m/s,距测试点5 cm的截面圆内风速偏差≤0.5 m/s。
4.1.3温度、湿度
将优化结构参数(放射源活度、源-收集极间距、进气口大小、进气口扩张曲线)后的传感器分别置于自制温度调节箱(温度:34~233 ℃)与湿度调节箱(含湿量:6.52%~10.65%),研究静态无尘条件下,温度和湿度对传感器输出信号的影响。
4.1.4粉尘浓度
使用高精度发尘器在风洞中加入不同浓度的粉尘(飞灰,主要成分为SiO2),观察传感器输出信号随粉尘浓度的变化情况。风洞内测试点处温度为30~33 ℃、含湿量为1%~2%、风速为(9.7±0.2) m/s。为方便记录传感器输出信号的变化情况,将传感器的输出电压进行负反馈A/D转换为浓度示值,即输出电压降低时,浓度示值升高。利用滤膜/滤筒称重法测量风洞中的粉尘浓度。首次加入粉尘后,调整信号输出电路,使传感器浓度示值与称重法得到的浓度值一致,即进行浓度示值的基点校准。在每次滤膜采样时记录传感器的输出电压与浓度示值。
4.2 结果与讨论
4.2.1放射源活度、源-收集极间距
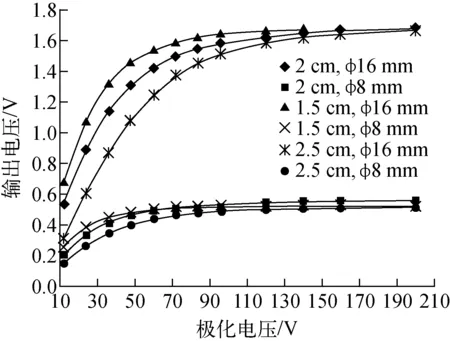
图5 不同源活度、源-收集极间距时输出电压与极化电压关系曲线Fig.5 The relationship between output voltage and polarization voltage with different source activities and source-collector spacing
静态无风条件下,不同源活度、源-收集极间距时输出电压与极化电压的关系示于图5。由图5结果可知,随着极化电压增加,输出电压逐渐增大并达到饱和。源-收集极间距较小时,达到饱和输出电压所需的极化电压也较小,源-收集极间距主要影响输出电压达到饱和值的快慢程度。使用源直径分别为16 mm、8 mm的β源时,不同源-收集极间距的饱和输出电压值对应为1.677 V、0.56 V,饱和输出电压值取决于所能收集到的最大初总电离数,说明给定种类β源的活度是决定输出信号大小的主要因素。β源活度较小时,β射线电离空气产生的离子数较少,一定浓度的粉尘载带离子引起输出信号的变化值占饱和值的份额较大,但β源活度不能过小,否则无法提供足够数量的离子以及输出信号。因此,选择β源直径为8 mm,源与收集极间距为2 cm。
4.2.2进气口大小
风洞中不同进气口大小、风速时输出电压与极化电压的关系示于图6。由图6结果可知,传感器在风洞中的输出电压小于静态无风时的输出电压。在某一风速下,随着极化电压的增加,输出电压不断增加并趋于饱和。加载的极化电压相同时,Φ8 mm进气口的输出电压大于Φ15 mm进气口的输出电压。可以预见,随着进气口面积的进一步减小,输出电压将不断接近无风时的输出电压。

图6 不同进气口大小、风速时输出电压与极化电压关系曲线Fig.6 The relationship between output voltage and polarization voltage with different areas of air port and wind velocities
电离粒子在电场中的漂移速率为:
(1)
式中:E为电场强度,V·cm-1;P为气体压力,Pa;m为电离粒子质量,kg;λ为电离粒子在101.3 kPa下的平均自由程,cm;U为电离粒子在电场中杂乱运动的平均速率,cm·s-1。μ为电离粒子的迁移率[9],cm2·s-1·V-1。
空气中正离子迁移率μ+=1.37 cm2·101.3 kPa·s-1·V-1,当极化电压≤200 V、气流速率为5~15 m/s时,正离子的漂移速率小于103cm/s量级,即气流速率与正离子漂移
速率在同一量级。测量腔内β源发射电子电离流动空气,产生的离子同时受到与气流同向的空气曳力和与气流方向垂直的电场力作用,离子对部分被收集。进气口的尺寸直接影响传感器内部的气流速率,传感器内部气流速率较小时有利于离子的收集和输出信号的提高。但进气口面积减小时,进入传感器的颗粒物数量也将减少,并导致因颗粒物载带离子引起的输出电压变化值减小。因此,综合考虑输出信号与进入传感器的颗粒物数量,选择圆形进气口的直径为8 mm。
4.2.3温度与湿度
传感器在不同环境温度下的实验结果示于图7(极化电压12 V、静态无风)。由图7结果可见,随着环境温度的升高,输出电压逐渐增大并趋于饱和。环境温度主要影响空气的粘度、密度、分子和离子的热运动,温度从34 ℃升高到233 ℃时,输出信号增加约50%。
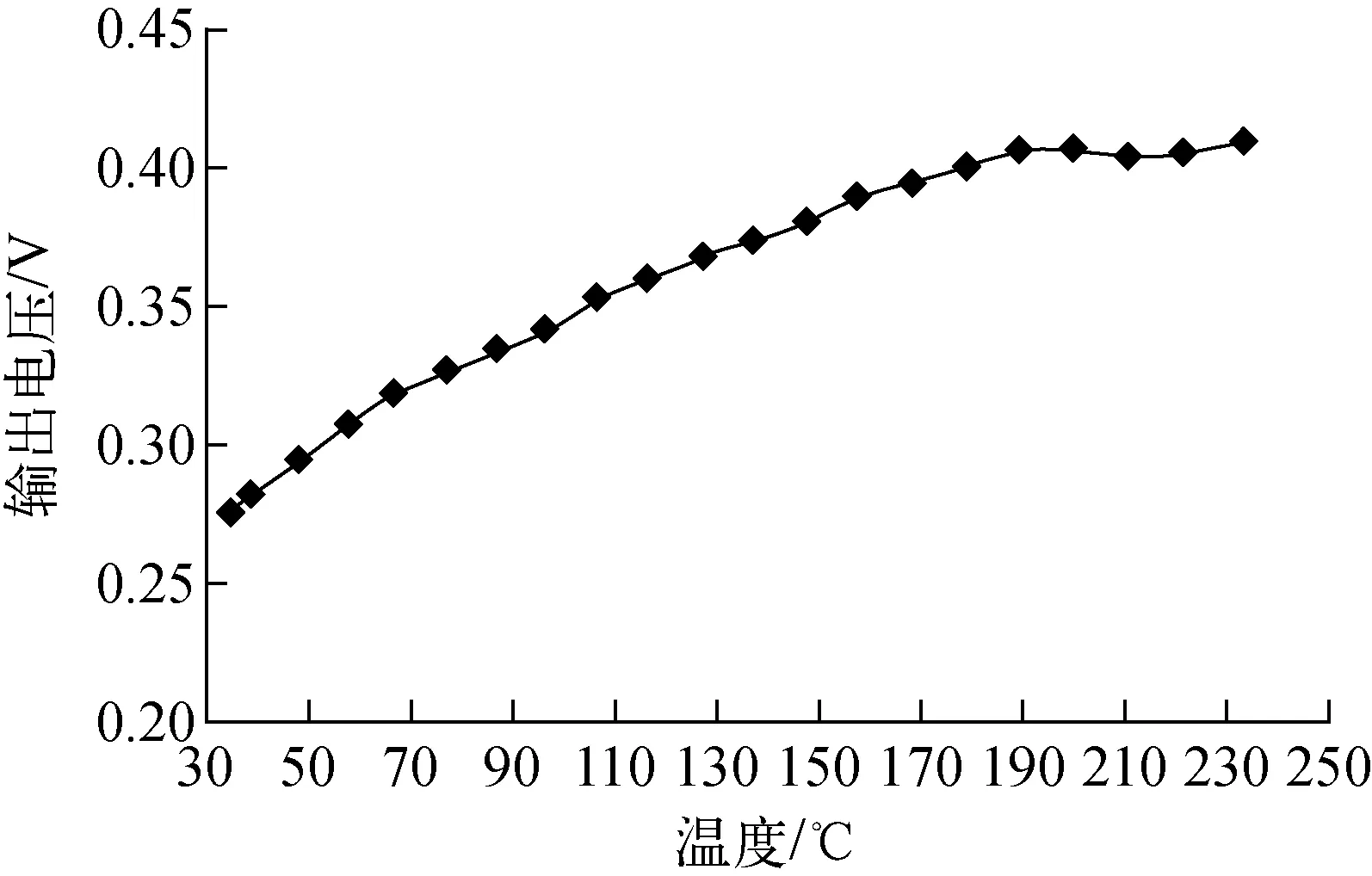
图7 输出电压随温度变化曲线Fig.7 The relationship between output voltage and environment temperature
传感器在不同环境湿度下的实验结果列于表2(极化电压36 V、静态无风)。由表2结果可知,随着环境湿度增大,输出电压逐渐减小。环境湿度对输出信号的影响主要体现在湿度对颗粒物粒径分布的改变和水分子对离子的吸附等。含湿量从6.52%增加到10.65%时,输出信号变化约30%。

表2 不同含湿量时的输出电压Table 2 The relationship between output voltage and humidity ratio
4.2.4粉尘浓度
风洞中加入不同浓度粉尘的实验结果列于表3(极化电压200 V)。由表3结果可以看出,传感器浓度示值随风洞中粉尘浓度增加而增加,验证了传感器测量原理的可行性。粉尘吸附电子的数量与粉尘粒径、粉尘在传感器内停留时间、传感器内部电场强度有关[10]。本实验中测量不确定度的主要来源有:① 粉尘在风洞内附壁和在拐角处沉积,造成风洞内粉尘浓度的波动;② 滤膜采样以及称重过程中的误差;③ 粉尘在风洞内循环运动时不断与风洞内壁面摩擦产生静电电荷,以及粉尘颗粒之间的碰撞摩擦造成粉尘荷电,荷电量与粉尘在风洞内运动状态和风洞壁面性质相关[11]。由于粉尘荷电以及粉尘运动碰撞时发生凝并、凝聚,改变了粉尘的粒径分布,不同粒径的粉尘粒子吸附离子的数量不同,进而导致输出信号波动;④ 荷电粉尘进入传感器影响了传感器内部的电场分布,进而影响离子对的收集过程。由于无法有效调节风洞内的温度与湿度,以及不同温、湿度环境中粉尘粒径变化的复杂性,因此,本实验未研究不同温、湿度条件下,传感器输出信号与粉尘浓度的关系。

表3 不同粉尘浓度时的输出信号Table 3 The relationship between output signal and different dust concentrations
5 结论
研究了一种基于β粒子源的平板电离室型粉尘浓度传感器,通过软件模拟优化了传感器结构,并通过实验研究了传感器结构参数和环境条件对输出信号的影响。给定种类β源的活度、极化电压是影响输出信号的主要因素,β源与收集极之间的距离主要取决于放射源的种类与整体结构要求。环境的温度、湿度对传感器输出信号影响较大。风洞中加尘实验初步验证了在较低湿度、较低温度和一定的气流速率时,粉尘吸附离子造成离子流减少是引起传感器输出信号变化的主要因素。研究结果可为利用同位素技术研制实时测量管道烟尘浓度的仪器设备提供参考,也为大气颗粒物浓度测量提供了新的思路。
猜你喜欢
小哥白尼(野生动物)(2020年3期)2020-07-27 01:54:04
数学大王·中高年级(2018年11期)2018-12-17 08:13:54
测控技术(2018年10期)2018-11-25 09:35:58
科技视界(2017年13期)2017-09-30 16:20:01
材料与冶金学报(2017年3期)2017-09-21 01:54:49
航空模型(2016年3期)2016-05-14 09:00:58
现代机械(2015年5期)2016-01-16 07:20:48
核科学与工程(2016年3期)2016-01-03 07:22:11
科技创新导报(2015年20期)2015-09-25 04:13:13
化学与生物工程(2014年1期)2014-03-27 09:26:57