
增程式混合动力汽车的分段式能量管理策略研究
2019-04-06 12:31洪木南周安健姚振辉
汽车工程学报 2019年2期
洪木南,周安健,苏 岭,姚振辉,刘 波
(重庆长安汽车股份有限公司 新能源汽车研究院,重庆 401120)
随着非可再生资源的日渐枯竭和环境污染的加剧,世界各国针对汽车节能技术开展了大量的研究与开发。混合动力汽车具有怠速启停、能量回收等节油功能,同时可以将发动机小型化,进一步降低油耗和排放,循环工况节油率可达25%[1-2],是减少石油依赖,降低环境污染的有效途径。插电式混合动力汽车插电式混合动力汽车(Plug-in Hybrid Electric Vehicle,PHEV)除了具有常规混合动力汽车的功能,还可以利用电网的能量进一步降低油耗和减少排放,近年来受到越来越多的关注[3]。
为了充分利用从电网充入的能量,在每个充电周期内,PHEV能量管理策略可以分为电能消耗(Charge Depleting,CD)阶段和电能维持(Charge Sustaining,CS)阶段。在CD阶段,PHEV要充分使用电能驱动车辆,动力电池剩余电量(State of Charge,SOC)逐渐下降;在CS阶段,既要避免动力电池过度放电,又要防止电池SOC过高而导致电网充电空间下降,所以需要将动力电池SOC维持在一个适当的范围内[4]。
常见的CD阶段策略有两类,一类是完全使用纯电动驱动,发动机始终处于停机状态;另一类则是油电混合驱动,纯电动驱动和发动机驱动在整个CD阶段可以同时发生,也可以先后发生。CS阶段策略也分为油电混合驱动和仅靠发动机驱动两种[5]。
在常规混合动力汽车的基础上将电池容量和电机功率加大,再增加车载充电机和外部充电接口,即可得到PHEV,因此,PHEV的构型同常规混合动力的构型并无区别。其中,并联、混联或动力分流构型因发动机可以直接参与驱动,在普通轿车应用中具有较多优势,所以受到大量关注[1-6]。随着PHEV纯电里程的增加,发动机不再是主导,仅作为增程器偶尔使用,因此增程式PHEV也将逐步得到发展[7]。
本文分析了增程式PHEV的开关式能量管理策略,针对其不足,提出了一种分段式能量管理策略。为进一步发挥分段式策略的优势,提出了一种自动调整分段式控制阈值的自学习能量管理策略。接着建立混合动力汽车仿真模型,对开关式能量管理策略和分段式能量管理策略进行了仿真比较,同时对具有自学习功能的分段式能量管理策略进行了仿真分析。
1 开关式能量管理策略
开关式能量管理策略如图2所示,当SOC低于某一限值时,立即启动发动机,在提供驱动功率的同时给电池充电;当SOC高于另一限值时,停止发动机。该策略在CD阶段完全使用纯电动行驶,在CS阶段则一部分时间用纯电动行驶,一部分时间由发动机发电驱动车辆行驶,同时给电池充电。

图2 开关式能量管理策略示意图
该方法优势明显,一旦发动机启动,可以始终工作在最高效率点,发动机的工作状态达到最佳,同时可以让SOC保持在一定的区间内。它的缺点是,发动机的发电功率和车辆驱动功率无关,发动机的大部分能量要经过电池的充放电过程再释放出来,降低了整个驱动系统的效率,其实质为牺牲电效率换取发动机的机械效率。从能量转换的角度看,发动机在车辆处于中高负荷时可以实现较高效率的发电且所发电量全部直接用于驱动车辆,从而避免进出电池带来的能量损失。开关式策略仅根据SOC大小决定发动机的启停,难以实现燃油经济性的最优化。
2 分段式能量管理策略
为了解决上述开关式控制的缺点,功率跟随算法被提了出来[8]。功率跟随算法大大减少了充放电过程,在一定的功率区间内,发电功率始终等于驱动功率;当驱动功率很低时,发动机按预先设定的最低功率点工作,多余的功率给电池充电;当驱动功率很大,发动机功率不够时,电池放电补充。这种方法不能保证SOC维持在一定区间,通常需要增加一些辅助策略,在低SOC时适当多充电,高SOC时适当减小发电功率。同时,由于发动机的功率要跟随驱动功率而发生变化,所以无法让发动机始终工作在最高效率点上,其实质是牺牲发动机的机械效率换取电效率。功率跟随策略下发动机的工作点如图3所示。
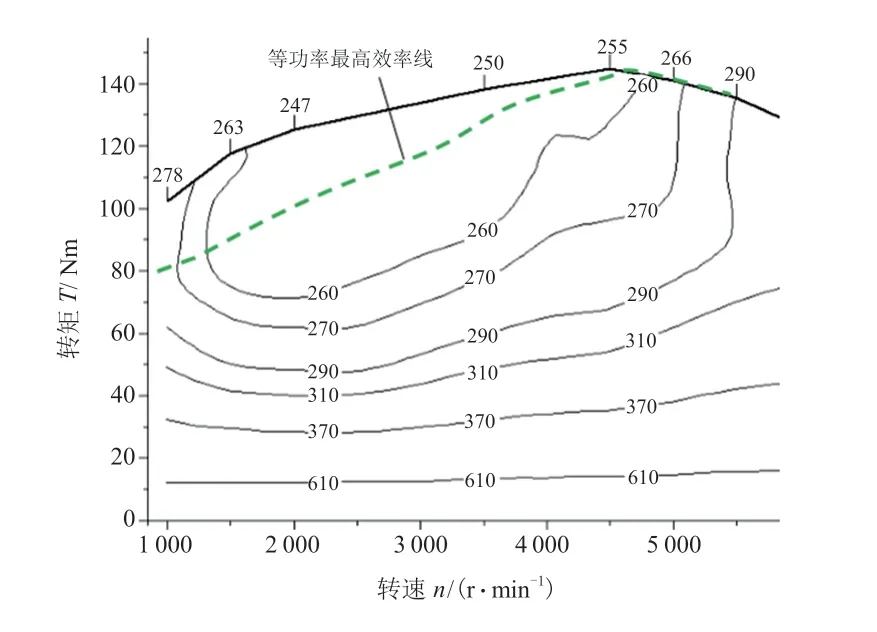
图3 功率跟随策略下发动机的工作点

图4 分段式能量管理策略
为了在PHEV中综合体现开关式策略和功率跟随策略的优势,提出了一种分段式能量管理策略,如图4所示,将SOC使用范围分成4个区域,其中SOCmin、SOCmax为电池允许使用的最低和最高SOC,SOCA、SOCB、SOCC为控制阈值。高SOC区域采用纯电动模式,发动机停机;中高SOC区域采用功率跟随算法;中低SOC区域采用开关式控制策略;低SOC区域对电池进行保护,只能充电不能放电。
在纯电动模式,根据驾驶员踏板和当前电机转速计算整车驱动功率,由驱动电机执行,发动机始终关闭,只在回收能量时充电,该阶段电量下降较快。
在功率跟随模式,发动机启动,发动机功率由下式给定:

式中:Pdrv为整车驱动需求功率,kW;Paux为各控制器和车载用电器的功率消耗,kP;ηgen为发电机发电效率,该效率与发电机的转速和转矩相关,%;Pice_max为发动机最大功率,kW;Pice为发动机最终目标功率,kW。
确定发动机的目标功率后,由最佳油耗线可以确定发动机的目标转速。最佳油耗线是发动机油耗特性图上一系列等功率线与有效燃油效率等高线相切的切点连接而成的线,其上的每一个点代表某个给定功率下的最低油耗点。
当驱动功率很大,发动机最大功率发电仍无法满足时,不足的部分由电池放电进行补充,因此该阶段仍然属于电量消耗模式,但由于大部分时间发动机发电功率满足整车驱动和其它用电要求,所以电量下降较缓慢。
在混动模式,发动机始终工作在最经济区域以上,发电功率优先满足驱动功率和整车用电功率,驱动功率太大而发电功率满足不了时,电池需辅助出力,驱动功率小而发电功率有剩余时,全给电池充电。
在只充不放模式,发动机工作在最经济区域以上,发电功率优先满足电池充电功率和整车用电功率,电池充电功率必须大于一个定值。驱动功率太大而发电功率满足不了时,优先给电池充电,限制驱动功率,驱动功率小而发电功率有剩余时,全给电池充电。
分段式控制策略通过在高SOC区域采用纯电动模式,充分利用电网充入电池的电量;在中低SOC区域引入功率跟随的控制思想,发电量随驱动功率而变化,减少了流经电池的能量损失;在低SOC区域通过混动和只充不放的控制模式,确保电量维持在低位水平而不过高或过低。
由于发动机在功率跟随区就有可能启动,如果在当前充电周期(即两次外插充电期间)内的行驶里程较短,原始充电量就已经够用时,去掉功率跟随区可以降低燃油消耗。如果当前充电周期内的行驶里程较长,去掉功率跟随区会导致快速到达混动区,混动区中电池不断地充放电,不利于系统整体效率的提高。
3 自学习策略
如前所述,进入功率跟随区的SOC阈值和当前充电周期内的行驶里程有关,不仅如此,用电负载等影响车辆能耗的因素也会导致最佳功率跟随SOC阈值发生变化。因此,固定的SOC阈值并不适用于不同的驾驶工况和驾驶习惯。一些学者通过提取工况特征参数[9]或GPS信息交互获取工况信息[10-11],从而选取更匹配的控制参数,但控制较为复杂,且无法考虑驾驶员操作、车辆用电负荷等其它因素的影响。本节首先研究SOC阈值与油耗的关系,并在充电周期结束时,利用该关系对SOC阈值进行调整,从而获得最佳的SOC阈值。
3.1 SOC阈值对油耗的影响
由图4可知,各SOC阈值具有如下关系:SOCmin≤SOCC≤SOCB≤SOCA≤SOCmax。为了充分利用电网能量,SOCB、SOCC应越低越好,但不能突破电池使用下限,且应预留一定的安全范围。同时,为了在CS阶段不频繁启停发动机,SOCB和SOCC的缓冲区间不能太窄。
SOCA的选取则直接影响CD阶段电量消耗的速度。研究表明,PHEV在当前充电周期结束时,如果SOC正好到达期望值,油耗最低[12],此时,来自电网的电能被分散到整个CD阶段。因此,如果当前充电周期内的总耗能不大于外部补充的电能,不需要启动发动机,油耗为0,SOCA=SOCB,无需启用功率跟随模式;如果当前充电周期内的总耗能大于外部补充的电能,则需要提前启动发动机才能获得更低的油耗,且总耗能越大,发动机启动时机越早,即SOCA越大。
3.2 SOC阈值自学习
如果驾驶员的行驶里程和驾驶习惯较为固定,可以通过判断当前充电周期内车辆运行时的SOC对SOCA进行调整,以便在下一个充电周期降低油耗。为了防止误调整带来的油耗大幅上升,每一个充电周期仅对SOCA进行阶梯性的微调,例如0.5%。调整方法如下:
(1)如果当前充电周期内车辆运行时的SOC始终大于SOCB,表明没有进入CS阶段,充入电池的电网能量没有充分利用,应推迟启动发动机,SOCA向下调整0.5%(不能低于SOCB,最低只能与SOCB相等)。
(2)如果当前充电周期内车辆运行时的SOC到达SOCB(±2%)后维持了一段较长的时间,表明车辆在CS阶段运行时间过长,发动机启动太晚,SOCA应向上调整0.5%。
(3)如果当前充电周期内车辆运行时的SOC到达SOCB(±2%)后仅维持了较短的时间,或者充电周期结束时SOC正好到达SOCB,SOCA不调整。
4 控制策略仿真分析
4.1 仿真模型
增程式混合动力车辆模型是在Matlab/ Simulink软件环境下,以某企业自主开发的混合动力汽车平台模型为基础搭建的。混合动力平台模型经过多次和实车试验数据对比,已用于指导车辆动力系统选型,具有较高的准确性。增程式混合动力车辆模型的部分参数见表1。
4.2 结果分析
给定初始SOC为45%,选择SOCC=30%,SOCB=35%,针对3种不同的SOCA,运行NEDC工况6000 s,结果见表2。由表可知,在电量均得到充分利用的前提下,SOCA越大,越能提前启动发动机进入功率跟随阶段,对油耗有改善。由图5中的 SOC变化曲线可知,随着SOCA的提高,电量的消耗变得更加“均匀”。此外,当SOCA=35%时,不会进入功率跟随模式,其实质是采用了开关式能量管理策略。

表1 车辆模型参数

表2 不同SOC阈值仿真结果

图5 三种不同SOC阈值下的SOC曲线
4.3 自学习策略
为验证自学习策略的效果,同时减少仿真量,假设每个充电周期的驾驶路线固定为6000 s的NEDC标准驾驶循环工况,每次充电仅充至45%。设定SOCC=30%,SOCB=35%,初始SOCA=35%,根据每次运行时SOC的值来动态调整SOCA阈值,结果如图6所示。由图可知,随着SOCA阈值的调整,百公里油耗逐渐降低;经过18次调整后,SOCA=44%时,油耗降至最低值,此时,如果SOCA再增加,油耗反而恶化。

图6 SOC阈值自学习结果
5 结论
提出了一种包含纯电动、功率跟随、混动、只充不放4个控制区的分段式能量管理策略,比开关式策略具有更好的燃油经济性。某车型的仿真研究案例表明,与开关式能量管理策略相比,分段式能量管理策略能使油耗降低3.2%。利用自学习手段对分段式能量管理策略的SOC控制阈值进行自动在线调整,在每两次充电之间,驾驶路线较为固定的情况下,可以自动调节到最优的控制阈值。
猜你喜欢
重庆大学学报(2022年2期)2022-02-28
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
智能计算机与应用(2020年4期)2020-08-31
小学生学习指导(低年级)(2018年11期)2018-12-03
中学生数理化(高中版.高一使用)(2018年1期)2018-02-10
理科考试研究·高中(2016年10期)2017-01-17
太空探索(2016年9期)2016-07-12
消费者报道(2014年13期)2015-03-19
人民交通(2009年1期)2009-01-19
