
基于UML的舰载雷达侦察设备建模方法
2019-04-04 08:15吉玉洁
指挥控制与仿真 2019年2期
吉玉洁,吴 萌
(1.中国人民解放军91336部队,河北 秦皇岛 066326;2.中国人民解放军91404部队,河北 秦皇岛 066000)
舰载雷达侦察设备作为海上攻防对抗“软杀伤”的重要装备,肩负对敌方各种辐射源信号进行截获、分析、识别、威胁告警,并引导实施有源/无源干扰的使命,贯穿于海上攻防对抗的全过程,对作战使命的达成起到了至关重要的作用[1]。因此模拟舰载雷达侦察设备并在相应的仿真推演系统中应用,对于完善舰载装备体系构成、进行相应战术应用具有重要意义。这也对舰载雷达侦察设备建模提出了更高的要求。作为舰载装备体系的重要组成部分,舰载雷达侦察设备模型需要在完成建模需求的基础上,满足建模的规范性及体系内建模语义描述的一致性。
UML(Unified Modeling Language,统一建模语言)是一种绘制软件蓝图的标准语言,在面向对象的系统分析与设计(OOA/OOP)中得到了广泛应用[2]。UML为仿真系统的开发提供了丰富、严谨、扩充性强的表达方式,系统用户、分析人员、测试人员和管理人员都可以从UML模型中无歧义地获取所需信息。它具有面向对象、独立于开发过程、可视化和规范化等优点[2],适用于大型和复杂系统的建模。本文采用UML技术,对舰载雷达侦察设备的仿真建模方法进行研究。
1 需求分析
舰载雷达侦察设备作为舰艇电子对抗系统的“眼睛”,主要用于监视本舰周围的雷达电磁环境,完成雷达信号的侦收和识别,提供信号类型、威胁等级以及识别可信度等信息,并对威胁目标进行告警[3],引导干扰设备实施软对抗,从而对红蓝双方的作战效果产生很大的影响。同时,对于仿真推演和指挥训练等大规模交战级仿真,如果模型粒度太细,将会影响整个仿真推演系统的运行效率和实时性。因此,仿真推演系统中舰载雷达侦察设备模型需在实时性和仿真粒度上做出合理取舍,既要求可以复现舰载雷达侦察设备工作流程,又能够反映真实设备的主要战技术指标,满足全系统的工作要求;同时舰载雷达侦察设备模型还应具有建模标准性,以满足模型后续与其他模型交互的一致性。综上,对舰载雷达侦察设备建模应是从系统功能及战技术指标出发,采用功能级建模方法,设计满足装备战技术指标和功能需要,仿真功能设计如下。
1) 具有雷达信号截获功能。能够在设备频带范围内,小于××万脉冲/秒的密集电磁环境中,实时截获接收电磁信号,并从中分离出各个独立的雷达辐射源信号,给出雷达辐射源信号的特征参数;
2) 具有信号跟踪功能。能够基于雷达信号特征参数对截获的电磁信号进行跟踪、分析,监测目标信号及其参数的变化情况;
3) 具有威胁目标识别判定功能。根据信号分析与处理的结果,基于数据库或特征参数进行目标识别及威胁等级判断,并将处理后的结果实时上报电子对抗综合控制设备;
4) 具有设备状态解算功能。能够根据相应仿真平台对模型的导调控制,解算上报设备状态。
用例图从用户和外部系统的角度,分析和考察系统的行为,并通过参与者与系统之间的交互关系描述系统对外提供的功能特性[4]。舰载雷达侦察设备仿真模型用例描述如图1所示。
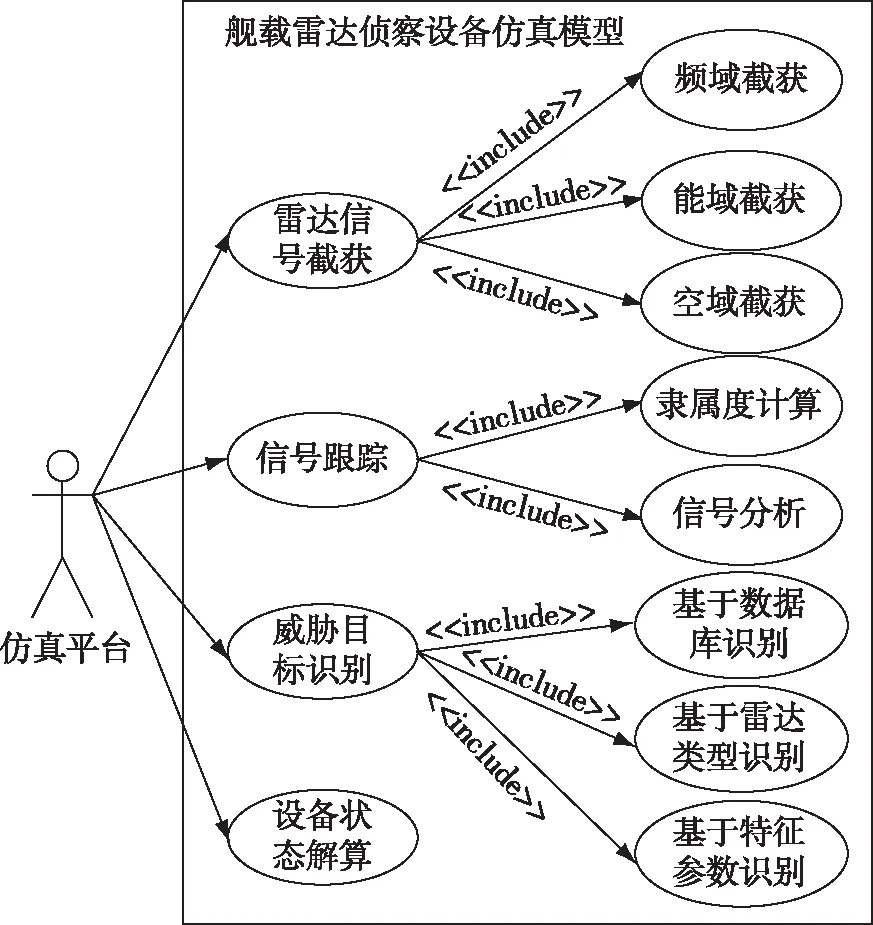
图1 舰载雷达侦察设备仿真模型用例
2 实体静态建模
根据舰载雷达侦察设备工作原理,为满足其在仿真推演系统中应用需求,将舰载雷达侦察设备实体抽象为雷达信号截获、信号跟踪、威胁目标识别及设备状态解算四个功能单元。考虑到仿真平台对模型底层功能调用维护的需要,模型应具备初始化单元、信息接收处理单元、共享数据存储区单元、报文组织拼接发送单元等通用模块,用于实现与仿真平台交互的需要。
类图是UML中最重要的建模图示语言之一,它用于建立类、类的内部结构以及类与类之间的各种关系模型[4]。使用类图中的聚合关系表示,舰载雷达侦察设备实体内部组成关系如图2所示。
3 模型动态建模
3.1 行为过程形式化
活动图主要用于描述可以引发对象状态变化的条件和动作,可以规范地描述系统的行为,是为活动过程建模的有效工具[5]。利用活动图表示的舰载雷达侦察设备总体行为过程如图3,根据舰载雷达侦察设备实体的工作原理及功能分析可将舰载雷达侦察设备总体行为过程细分为雷达信号截获、信号跟踪和威胁目标识别三个子行为过程。

图3 舰载雷达侦察设备总体行为过程
3.1.1 雷达信号截获行为过程
雷达信号截获行为与静态建模中雷达信号截获单元对应,用于完成雷达信号截获判定,行为的触发条件为接收到雷达信号,终止条件为遍历雷达信号存储区完成雷达信号截获解算,具体行为过程如图4所示。

图4 雷达信号截获行为过程
雷达信号截获行为主要从频域、能域、空域三方面进行信号截获判定,具体决策规则如下:
1) 频域截获能力计算规则:当雷达辐射源的工作频率在雷达侦察设备侦察频段上下限之间时,认为该雷达信号频域上可被截获,否则判断不能被截获;
2) 能域截获能力计算规则:若到达侦察设备接收机的脉冲功率大于侦察设备的灵敏度,并小于侦察设备的灵敏度与动态范围的和,认为该雷达信号能域上可被截获,否则判断不能被截获;
3) 空域截获能力计算规则:当雷达和侦察设备之间的实际距离小于视距时,认为该雷达信号符合空域截获条件,否则判断不能被截获。
式中,Dr为视距,单位km;H1为侦察机高度,单位m;H2为辐射源高度,单位m。
3.1.2 信号跟踪行为
信号跟踪行为与静态建模中信号跟踪解算单元对应,用于根据预先设定好的隶属度阈值进行雷达信号参数(射频、重频、脉宽)匹配判断,确定该信号为新信号时,对新信号进行编批存储;判断该信号为已经截获的信号时,进行信号参数更新。行为的触发条件为收到被截获的雷达信号,终止条件为遍历已截获雷达信号存储区完成解算,具体行为过程如图5所示。
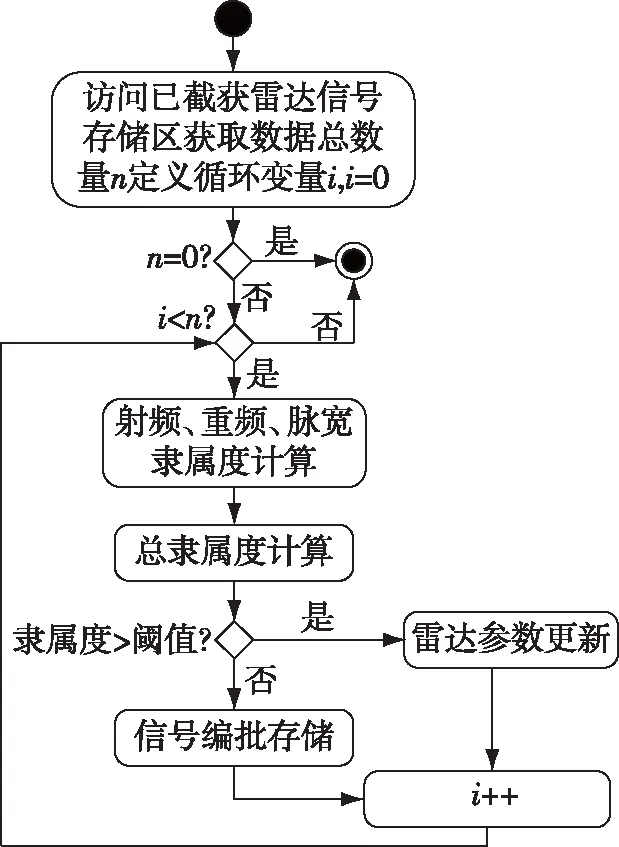
图5 信号跟踪行为过程
假设数据库中已有N条记录,循环计算N次,得到雷达信号与N个信号的隶属度,取N个隶属度的最大值为最终隶属度值,如果该最终隶属度值大于阈值,则得到最终隶属度时对应的数据库表中记录的雷达信号就是匹配信号。基于射频、重频、脉宽计算总隶属度,对每一个信号算法如下:
射频隶属度:uf=雷达信号射频中心值/某个信号射频(当值大于1时,取其倒数);
重频隶属度:uF=雷达信号重频中心值/某个信号重频(当值大于1时,取其倒数);
脉宽隶属度:ut=雷达信号脉宽中心值/某个信号脉宽(当值大于1时,取其倒数);
总隶属度:u=δ1·uf+δ2·uF+δ3·ut
其中,δ1、δ2、δ3分别为射频、重频、脉宽隶属的权重值,δ1+δ2+δ3=1。以某型雷达侦察设备为例,δ1=0.4,δ2=0.4,δ3=0.2。
3.1.3 威胁目标识别行为
威胁目标识别行为与静态建模中威胁目标识别单元对应,用于依据数据库或分析计算方式对已截获的雷达信号进行目标识别或威胁判断。行为的触发条件为收到被截获的雷达信号,终止条件为遍历截获信号存储区完成威胁目标识别解算,具体行为过程如图6所示。

图6 威胁目标识别行为过程
首先在侦察设备数据库中查找进行威胁目标判断识别,识别方法也采用隶属度计算识别方法;如果未能识别,则通过信号中目标类型进行分析;在不能获取雷达类型信息的情况下,可基于雷达信号的重频、方位、脉宽、载频参数,通过合理设置参数权重,计算出雷达综合威胁度,通过对综合威胁度大小的分级得出雷达威胁等级。
3.2 交互关系形式化
在对抗环境中,雷达侦察设备接收到外部辐射的电磁信号,内部经截获、分选、威判,之后上报威胁目标信息至电子对抗综合控制设备,整个工作过程中既有模型内部单元交互又有模型间的交互。时序图用于捕获系统运行中对象之间有顺序的交互,按时间顺序对消息的交互过程建模。它展示的是按时间顺序发生的消息传送,可以完整地表达对象之间信息的交互过程[6]。舰载雷达侦察设备模型内部单元间交互及模型间内部交互关系分别如图7、图8所示。
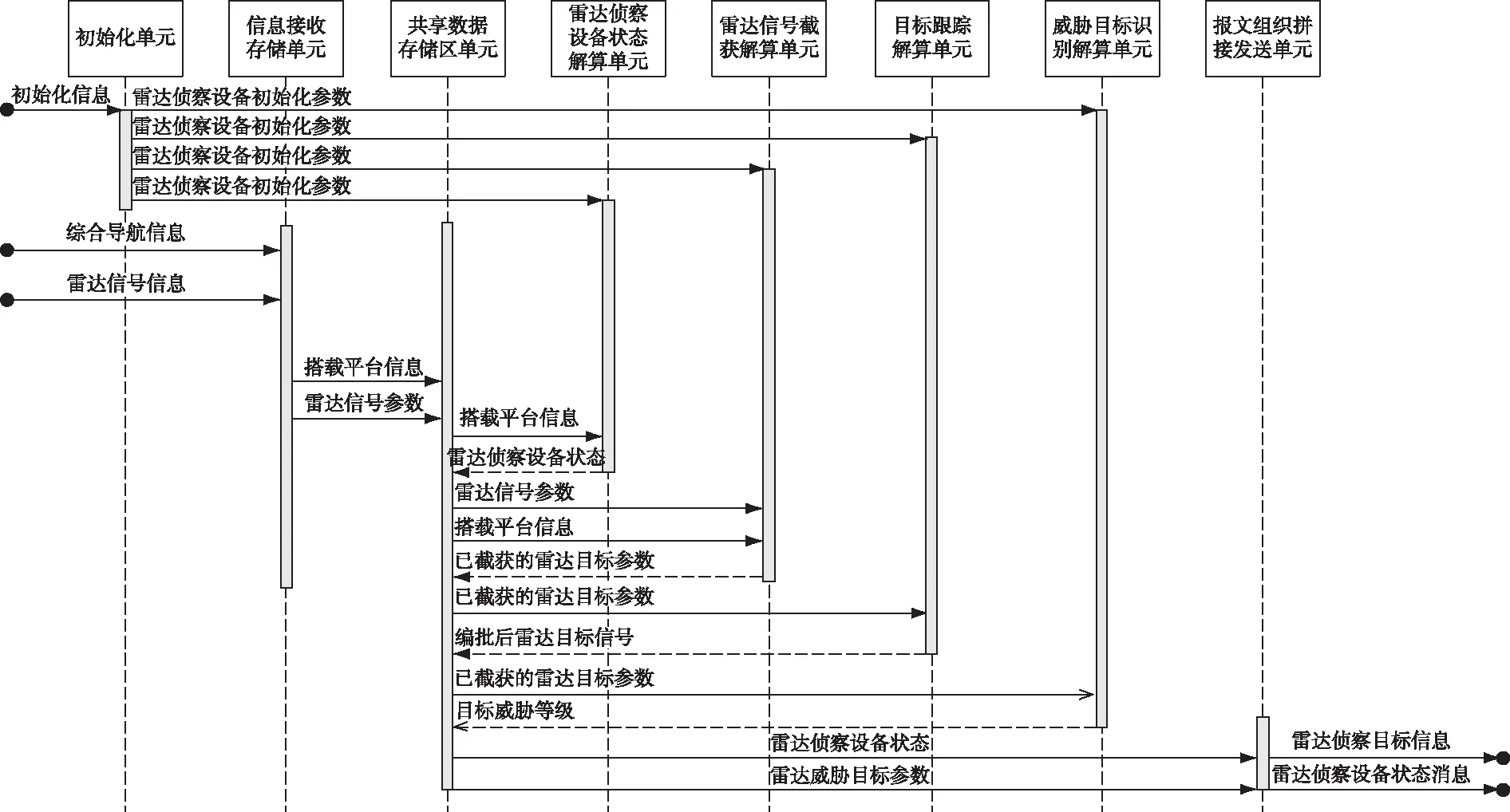
图7 舰载雷达侦察设备实体内部时序

图8 舰载雷达侦察设备模型外部交互的时序
4 结束语
本文基于UML技术开展了舰载雷达侦察设备仿真模型的可视化构建工作,采用用例图、类图、活动图和时序图对舰载雷达侦察设备模型的功能需求、静态结构、动态行为进行了详细分析和建模研究。该建模方法在提高建模效率、规范建模流程、优化模型结构及指导软件编写等方面具有显著优势。本文所建立的舰载雷达侦察设备模型已应用于某战术演习仿真推演系统的工作中,显著地缩短了模型开发周期,增强了系统的可靠性,取得了良好的效果。本文工作表明,应用UML技术进行仿真建模工作,可有效地提高模型的开发效率与质量。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30
天津外国语大学学报(2021年1期)2021-03-29
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
红领巾·探索(2020年5期)2020-05-19
初中生世界·九年级(2020年2期)2020-04-10
电子制作(2019年15期)2019-08-27
航天电子对抗(2019年4期)2019-06-02
小学生学习指导(低年级)(2018年12期)2018-12-29
小学生导刊(高年级)(2016年11期)2016-11-14
文理导航·科普童话(2015年6期)2015-07-29
