具有载荷扰动抑制的卫星姿态控制方法及验证
2019-04-04 06:16:18李明群雷拥军牟小刚
中国空间科学技术 2019年1期
李明群,雷拥军,* ,牟小刚
1.北京控制工程研究所,北京 100190
2.空间智能控制技术重点实验室,北京 100190
随着空间任务需求的不断增长,卫星将要承载的有效载荷种类越来越多,其中有很大一部分载荷在正常工作时需要保持旋转,如海洋水色仪、扫描微波辐射计、微波散射计、微波成像仪、扫描镜等。旋转的载荷将会给卫星姿态带来干扰[1-10],若不进行干扰补偿,则卫星姿态稳定度和指向精度都会下降,影响卫星的任务,这种干扰严重时甚至会激发挠性附件(如太阳翼)的振动,导致卫星的姿态震荡。为此需要研究具有针对旋转载荷的扰动抑制的卫星姿态控制方法。
刘蕊等[1]分析了载荷扫描镜运动与翼板步进运动对卫星姿态的影响。王新民等[2]分析了载荷干扰力矩的特性及对卫星姿态的影响,说明了周期波动的干扰力矩必将导致姿态的周期波动。张庆君等[5]主要从微振动方面进行研究,从微振动的传递路径设计、振动源抑制、降低载荷敏感性等方面介绍了微振动抑制方法。于哲峰等[6]针对扫镜运动对卫星姿态的影响作了分析和仿真;雷静等[7-8]采用特征系统实现算法对扫描运动的干扰进行估计。王雪冰等[9-10]设计了基于干扰观测器对卫星干扰力矩进行估计,并加以前馈补偿。Liu[11]将周期干扰基波的幅值参数作为状态量,设计了状态观测器对干扰力矩进行估计,并做前馈补偿。
本文利用李亚普诺夫方法,在反馈通道设计了基于参数辨识的自适应控制算法,该算法可确保干扰力矩的参数未知情况下闭环系统稳定,并实现干扰力矩的估计和补偿。本文最后利用真实卫星的控制部件展开了物理试验验证。
1 星体动力学及载荷扰动描述
对于一类带有绕星体固定轴周期转动大型载荷航天器,由于动、静不平衡特性的存在,载荷转动时会对星体产生相应的扰动力矩。将卫星中心体视为刚体,考虑载荷运动扰动的卫星动力学方程可表示为:

式中:ω为卫星角速度;J为星体转动惯量,为正定对称阵;hw为角动量交换装置的合成角动量;τc为姿态控制力矩;τd为载荷运动时对星体产生的干扰力矩;(·)×表示对应向量形成的反对称矩阵。
由载荷运动的周期性,其产生的扰动力矩可表示为:

式中:Ad为扰动力矩幅值;ωd为载荷运动角频率;βd为扰动力矩的相位。
式(2)所示扰动力矩可进一步表示为:

式中:ad、bd为常系数。
2 具有扰动抑制的姿态控制
2.1 载荷周期干扰的影响分析
在对地稳定运行时,星体相对轨道坐标系的姿态可采用欧拉角参数描述,记星体三轴欧拉姿态角分别为φ、θ与ψ,通常称之为滚动角、俯仰角和偏航角,对应的星体角速度ω可表示为:
式中:ωbo为星体相对轨道系的角速度;Cbo为星体系相对轨道系的方向余弦阵;ωo为轨道角速率,对于近圆轨道可近似看作为常数。
当三轴姿态φ,θ,ψ为小量时,ωbo可近似表示为且有
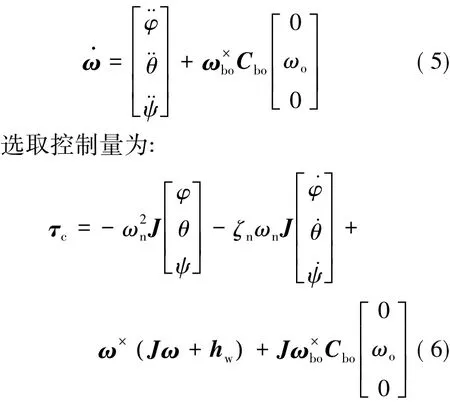
式中:ωn、ζn>0为选取的控制参数,其决定闭环系统动态特性,可按各通道控制性能要求进行设计。为了描述简洁,本文中给出3通道对应变量参数均为相同。
在式(6)所示控制下,由式(3)与式(1)可得闭环系统的动力学方程为:
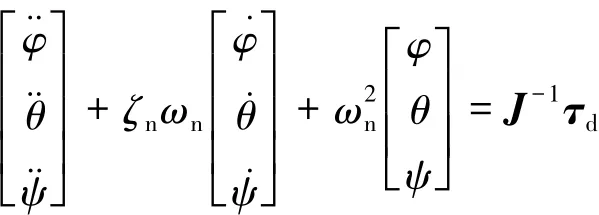
由上可知,在载荷有界扰动下系统姿态将存在偏差。
2.2 具有扰动估计的自适应控制律设计
在式(3)所示扰动力矩基础上考虑系统常值扰动cd,式(3)改写为:

于是式(1)表示为:


式中:^ad、^bd与 ^cd分别为ad、bd与cd对应的估计值,相应的参数自适应律为:
式中:参数更新增益 γ1、γ2、γ3为大于零的常数。
2.3 系统的稳定性分析
将式(9)代入式(8),有

针对式(8)与参数自适应律式(10)组成的闭环系统,以下采用李亚谱诺夫稳定性直接分析方法对系统稳定性进行分析[12]。


综上可得闭环系统稳定,其中姿态角及姿态速度角误差趋于零,且估计扰动力矩参数^ad、^bd与^cd均有界。
3 物理试验
本文所述的干扰力矩补偿方法在气浮台进行了试验验证,鉴于负载质量和惯量较大,非水平姿态条件下会对驱动机构产生较大的影响,因此本文试验采用单轴气浮台试验,则本文算法的公式中可不考虑轨道角速度ωo。
3.1 单轴气浮台试验系统
试验系统如图1所示,由单轴气浮台、台上仿真控制系统、地面控制台等组成。其中台上仿真控制系统的控制部件、计算机、载荷均为星上真实设备。
高精度单轴气浮台主要由气浮轴承、仪表平台和测角装置组成。仪表平台台面直径为2.2m,转动惯量 450 kg·m2,台体扰动力矩小于0.002N·m,台体测角装置绝对位置精度优于1″,测角分辨率优于 0.2″,角速度精度可优于0.0001(°)/s。

图1 单轴气浮台试验系统Fig.1 Single axis air-bearing table
载荷转动惯量 140 kg·m2,标称转速为45(°)/s,平台配置一个动量轮作为执行机构。星上软件驱用动量轮产生与载荷角动量大小相等、方向相反的角动量,对载荷角动量进行抵消,保持整个气浮台的零动量,同时以台体的姿态角和角速度作为反馈量,采用PD控制方法对卫星平台进行姿态控制,控制周期为0.25s。
3.2 试验结果
(1)无干扰力矩补偿
当载荷稳定在标称转速旋转时,由于动不平衡、静不平衡、以及转速不稳定的影响,会对平台产生干扰,图2为载荷的实际转速。
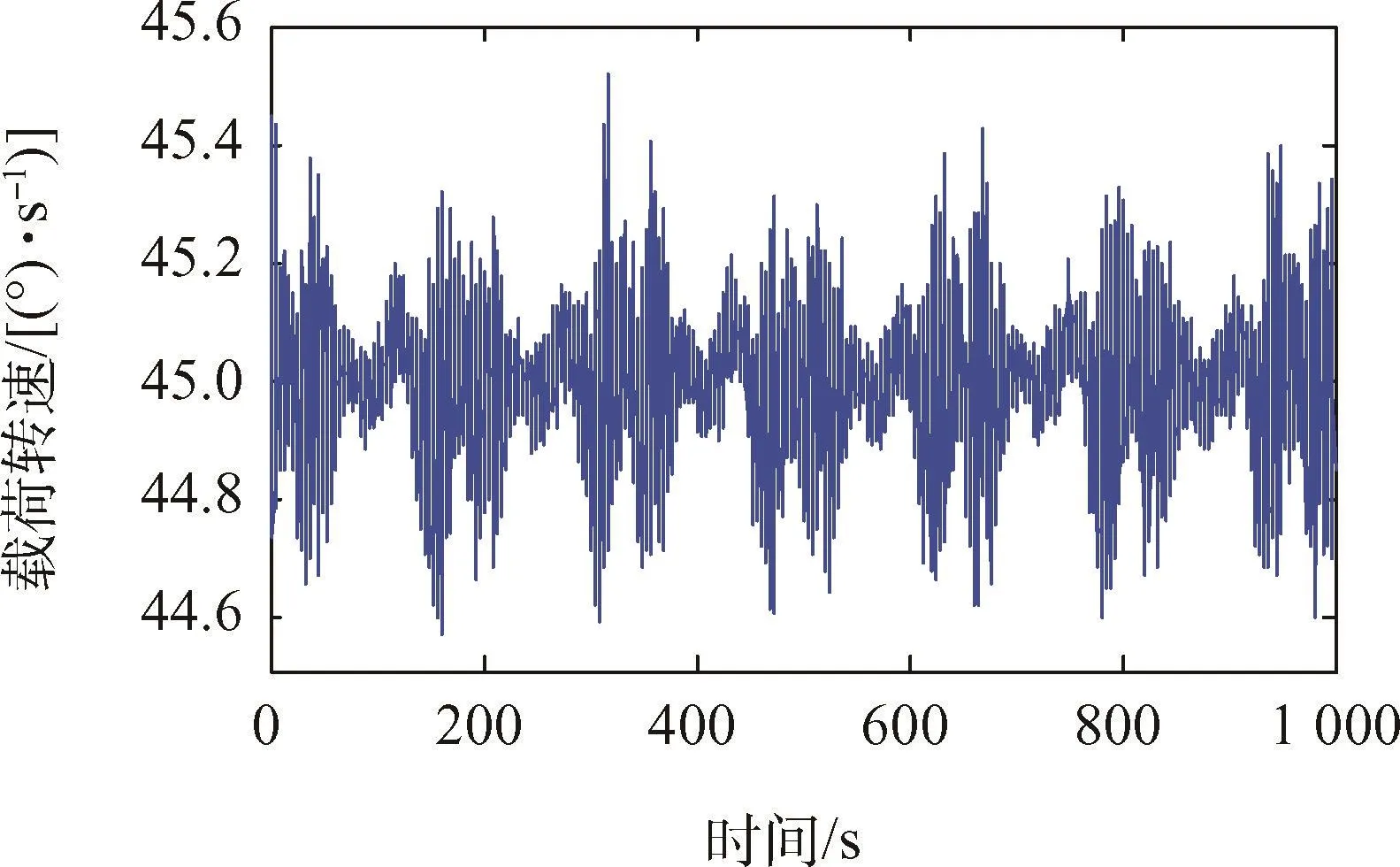
图2 载荷的转速Fig.2 Speed rotor of load
在不进行干扰力矩补偿的情况下,PD控制器的控制参数选择为 kp=10.24、kd=122.93,得到平台的角度及角速度曲线如图3、图4所示。
对角速度的频谱分析如图5所示。
可以看出,在不做干扰力矩补偿时,转台角速度主要集中在0.125Hz频率上,说明在这个频率上存在较大的干扰力矩,这恰好与载荷旋转的频率相同,其他几个次要的频率分量都是载荷转速的0.5倍频、2倍频、3倍频,这就说明转台所受的干扰力矩主要与载荷旋转相关。
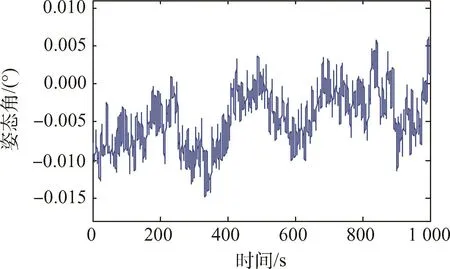
图3 无干扰力矩补偿的姿态角Fig.3 Attitude angular without interference suppression
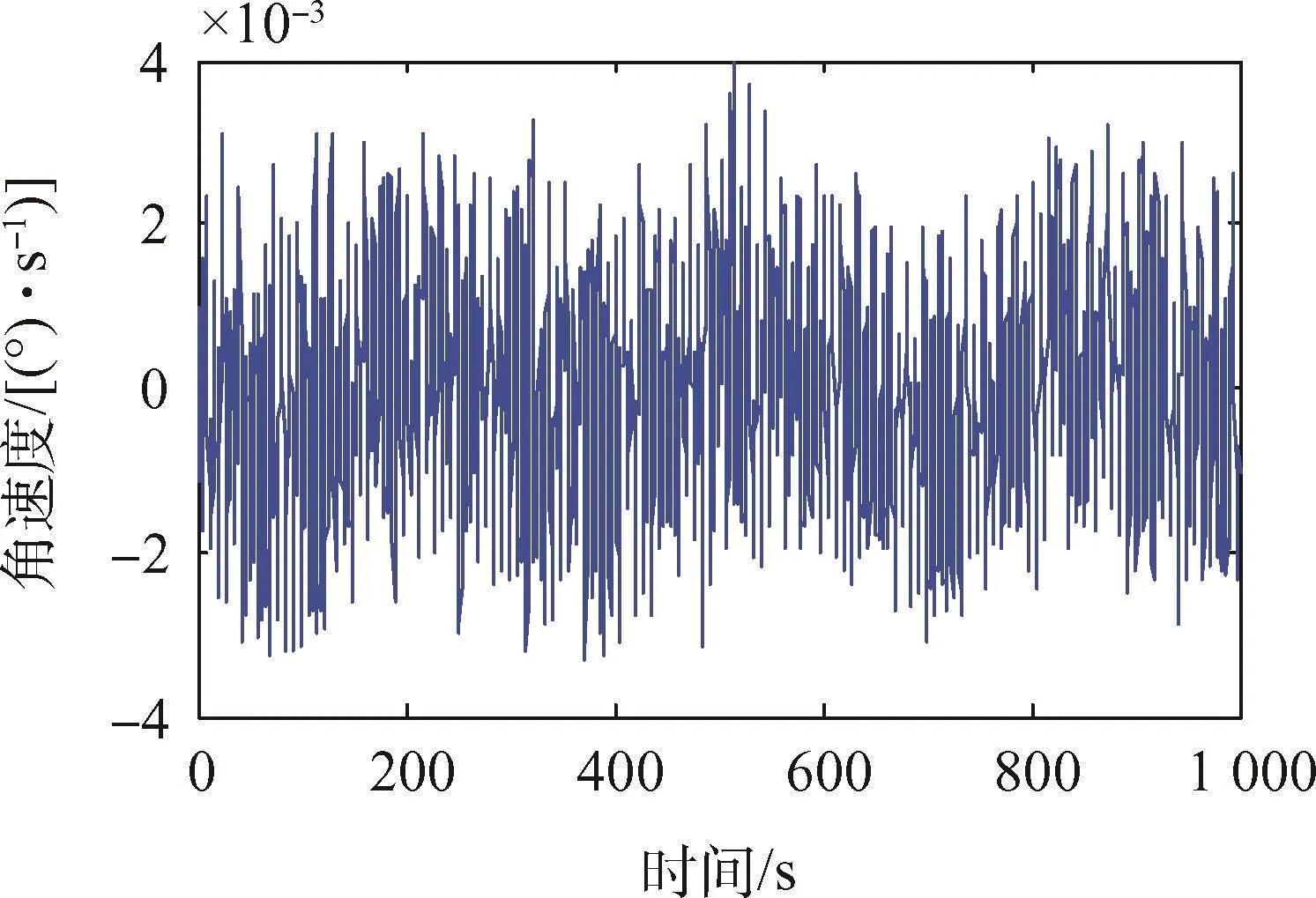
图4 无干扰力矩补偿的角速度Fig.4 Attitude angular rate without interference suppression
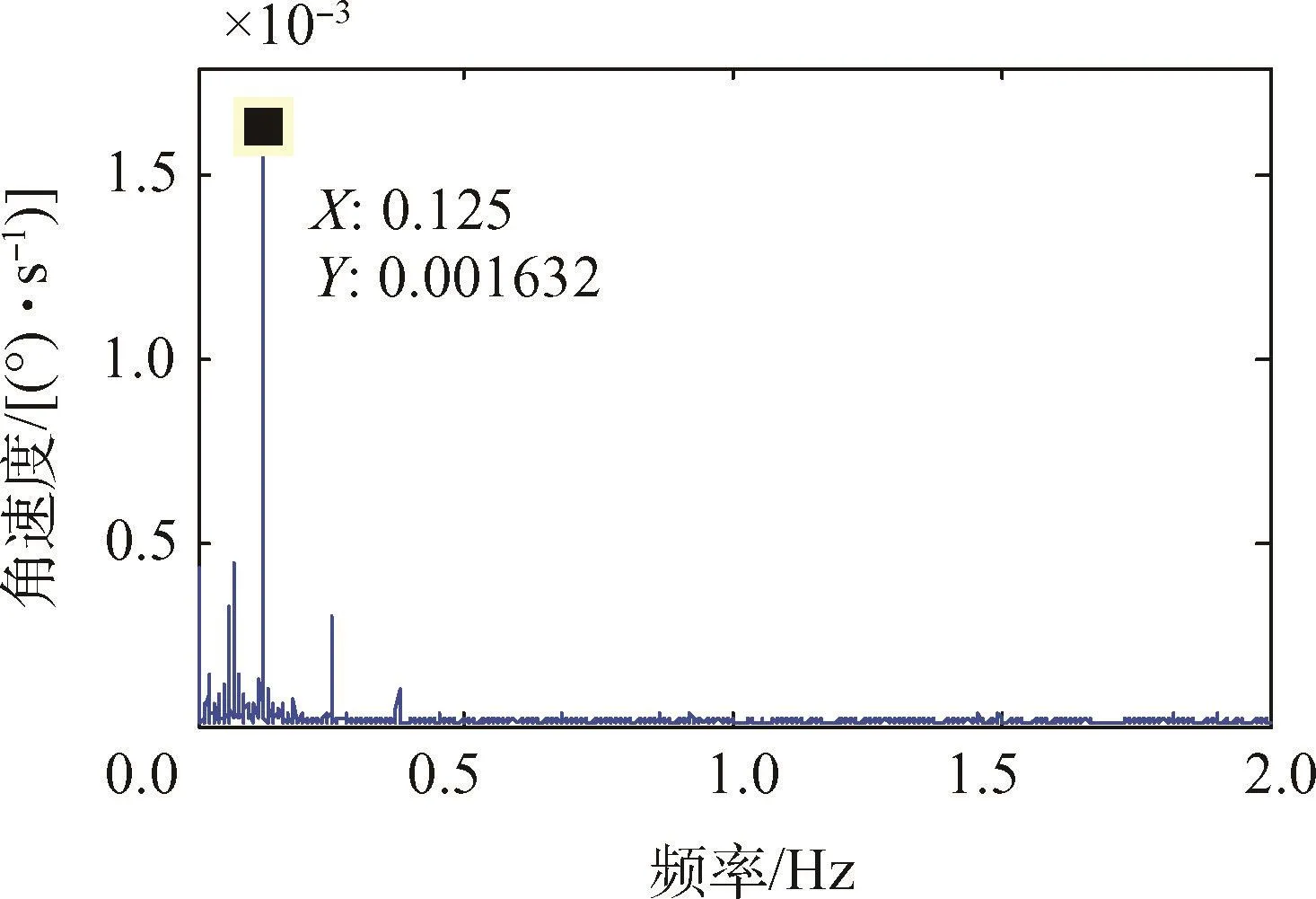
图5 无干扰力矩补偿的角速度频谱Fig.5 Frequency spectrum of attitude angular rate without interference suppressio
(2)基于参数辨识的自适应控制
根据频谱分析,选择载荷旋转的频率,即选择0.125Hz为干扰力矩估值的频率,利用第2.2节式(9)(10)描述的自适应控制率,设置参数kp=10.24、kd=122.93、λ =0.05、γ1=100、γ2=100、γ3=100,控制效果如图 6、图 7 所示。
对比图2、图3和图6、图7,可以看出自适应控制提高了姿态角控制精度、减小了角速度。对转台角速度作频谱分析如图8所示。
对比图5和图8,可以看出经过自适应控制算法得干扰力矩补偿,角速度在0.125Hz的分量被有效的抑制,说明该算法对干扰力矩辨识准确,补偿有效。
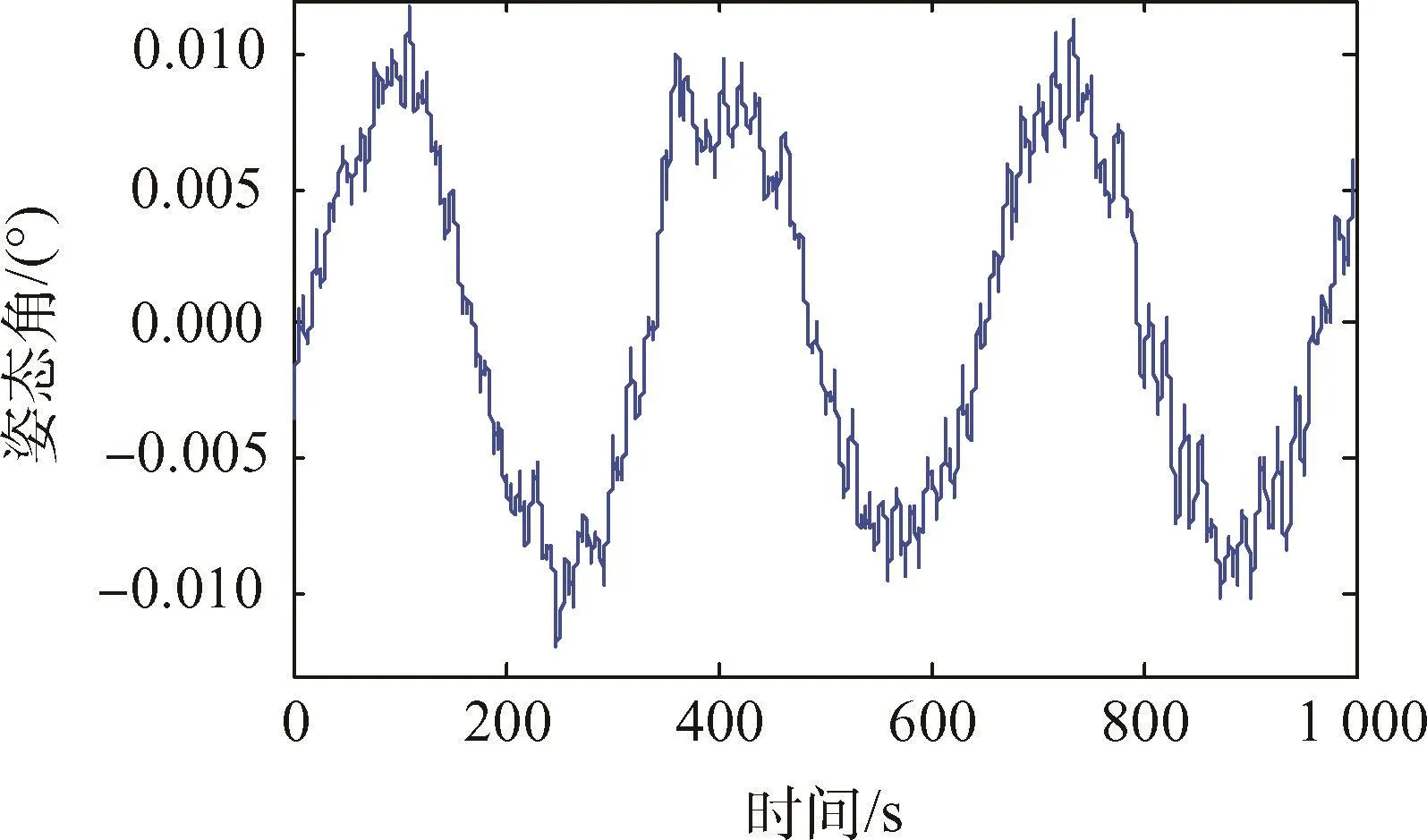
图6 自适应控制的姿态角Fig.6 Attitude angular with adaptive control
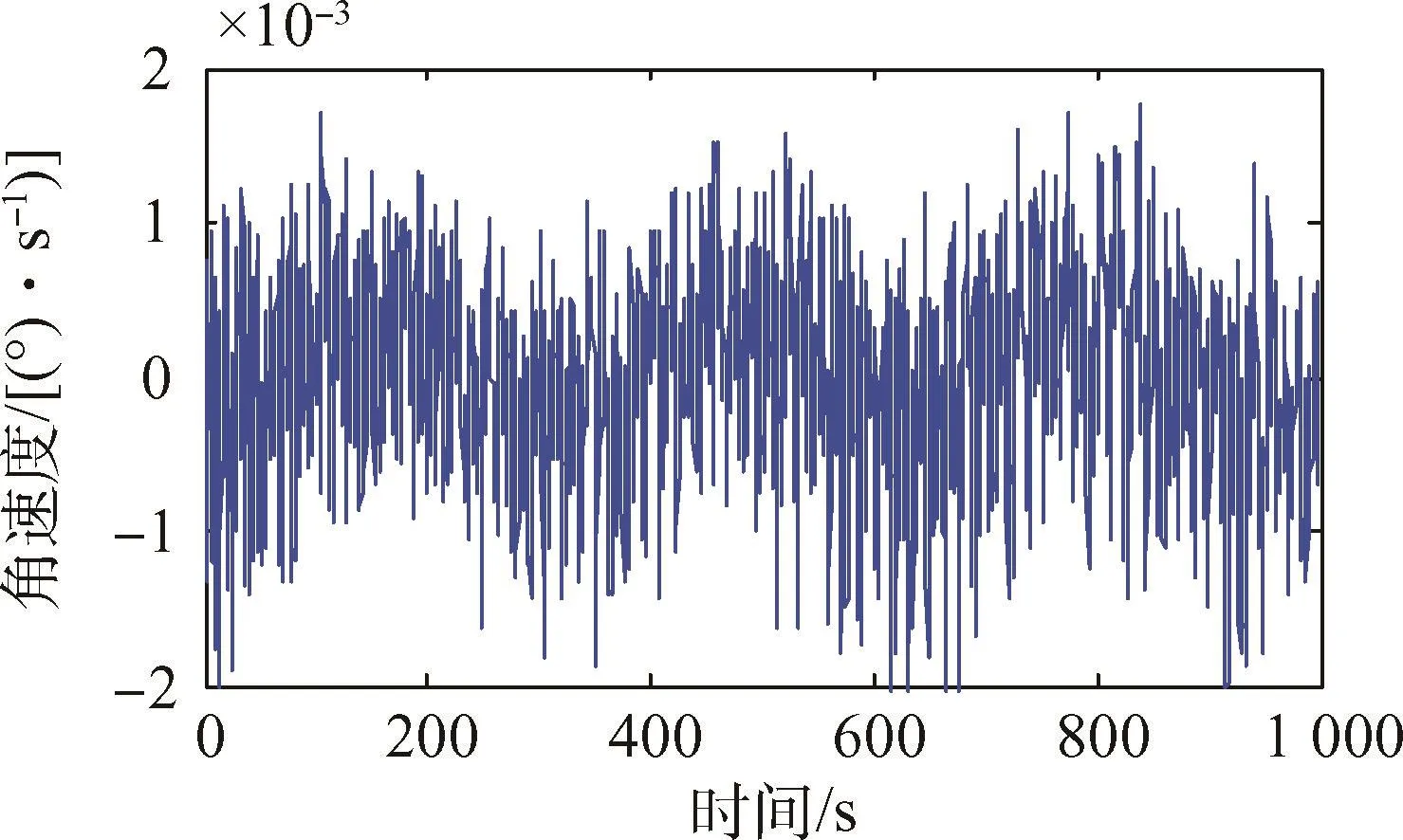
图7 自适应控制的角速度Fig.7 Attitude angular rate with adaptive control

图8 自适应控制的角速度频谱Fig.8 Frequency spectrum of attitude angular rate with adaptive control
4 结束语
本文研究了卫星姿态控制中对旋转载荷产生的干扰的抑制问题,针对干扰的周期特性,设计了对干扰进行参数辨识的自适应控制方法。本文最后利用真实的卫星控制部件,基于单轴气浮台作了物理试验验证,通过控制效果的比较及频谱分析,表明本文的方法对干扰进行了正确的估计和补偿,具有明显的干扰抑制作用,且本文算法的形式简单,易于星上软件实现,有较好的应用前景。
猜你喜欢
数学物理学报(2021年5期)2021-11-19 07:00:58
数学物理学报(2019年5期)2019-11-29 07:46:24
小学科学(2019年9期)2019-10-18 09:33:23
电子测试(2018年15期)2018-09-26 06:01:04
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
自动化学报(2016年8期)2016-04-16 03:38:51
火控雷达技术(2016年1期)2016-02-06 02:18:01
西北工业大学学报(2015年1期)2016-01-19 03:29:56
物理教师(2015年8期)2015-07-25 08:03:04
中国铁道科学(2015年4期)2015-06-21 06:46:06