高级驾驶辅助系统对驾驶员表现的影响研究
2019-04-04 01:43:18孙兴智
汽车文摘 2019年4期
1 前言
随着道路上车辆和驾驶员数量的不断增加,由于更频繁和更严重的交通事故,社会面临着重大挑战。行驶时保持安全的车距和保持在车道上被认为是安全行驶预防事故发生的关键因素。为了提高驾驶员的警惕性和感知能力,研发人员开发了各种先进的驾驶员辅助系统(Advanced Driver Assistance Systems,ADAS)。
利用ADAS可以纠正驾驶行为。已经发现,如果正确及时地提供ADAS干扰功能,则可以有效地避免或减轻高风险情况。本文通过高级驾驶辅助系统对驾驶员表现的影响研究,介绍了不同情况下驾驶员行为的特点,为基于驾驶员表现的ADAS研发提供基础与参考。
2 ADAS与驾驶员表现
高级驾驶辅助系统采用车载传感器,收集车内、车外的环境参数,通过识别与传输、显示技术,提示驾驶人员可能遇到的危险。摄像头、雷达、激光和超声波等传感器已经大量应用在ADAS中。
ADAS作为一种为驾驶员提供辅助和支持的智能系统,与驾驶员有着密切的关系。除安全要求外,ADAS还应适应驾驶员的驾驶习惯。如果可以正确、及时地提供ADAS干扰功能,则能够有效地提高行车安全。例如前端碰撞预警(FCW)系统可以警告驾驶员避免或减轻与主车辆前方障碍物即将发生的碰撞。车道偏离预警(LDW)帮助驾驶员避免车道偏离,以减少相关事故。ADAS智能手机应用程序能够估计驾驶员的行为是否安全,可以通过仔细监测驾驶员的面部特征来估计驾驶员的疲劳程度,尤其是通过分析眨眼频率。通过使用双摄像头智能手机,可以监控驾驶员的注视和坐在车前的移动障碍物。基于智能手机的ADAS可用于检测驾驶员是否分散注意力,同时拍摄自拍照并将他们的注意力吸引到道路上[1],图1是Transilvania University of Brasov大学的Dumitru用模拟器研究ADAS与驾驶员表现。
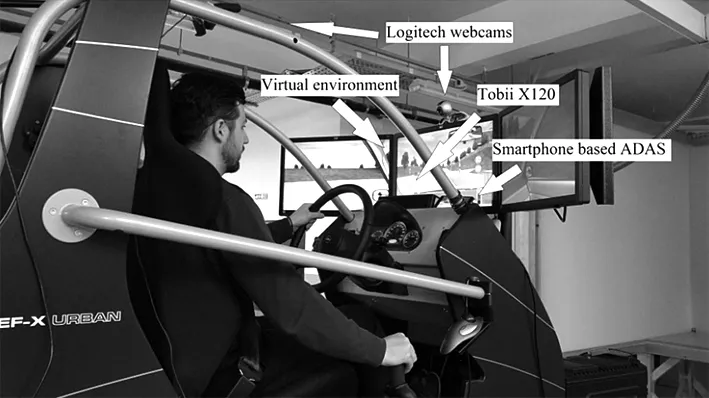
图1 驾驶模拟器(ECA-Faros EF-X)[1]
3 研究现状及目前存在的问题
由于ADAS与驾驶员有着密切的关系,因此,大量的研究者致力于开展与ADAS相关的驱动模型的研究。Alireza Khodayari建立了基于神经网络的车辆跟踪模型,并利用驾驶数据对模型进行训练[2](图2)。
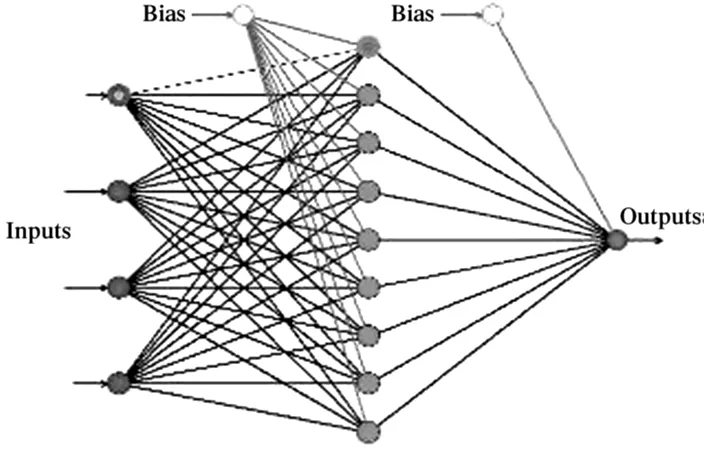
图2 ANN跟车行为模型[2]
在分析了车辆行驶数据后,王建强提出了一种基于特定行驶条件下的时间间隔和碰撞时间的自适应纵向驾驶辅助系统[3]。但由于目前研究人员缺乏对正常驾驶条件下驾驶行为的分析,这可能无法解释驾驶员行为的决策依据。
以往的研究发现,驾驶特征,如经验、性别和风格、以及道路环境都会显著影响驾驶行为。此外,道路环境和个体驾驶员的个人感受和特征会影响ADAS的接受度[4]。接受度是一个多方面的概念,研究人员在他们的研究中关注它的不同方面。有不同的方法用于建模和测试ADAS的驾驶员接受度。一种方法是基于理论框架,而在其他方法中,模拟驾驶[5]和现场操作测试(FOT)[4]也被用于现有研究。在驾驶员行为学习和适应方面,ADAS表现仍有改进的空间。虽然许多研究人员正在努力改善ADAS的性能和可接受性,但仍然存在适应个体驾驶员行为的挑战。最大限度地降低负面行为适应的可能性并最大化系统可用性和用户接受度被认为越来越重要。
车辆性能和安全性与驾驶员采取的控制动作直接相关,驾驶员充当车辆的自适应最佳决策控制器。该人体控制器在车辆运动控制、稳定性、驾驶安全性以及能量消耗和排放方面起着重要作用。ADAS的成功取决于系统与每个驾驶员合作的能力,并以与驾驶员驾驶风格相辅相成的方式与驾驶员共享控制。驾驶员模型提供了一种数学方法来定义驾驶员的驾驶风格/行为,并可以与ADAS进行交互。大多数现有的驾驶员模型已经被设计和评估用于标准的非紧急车道变换(LC)操作,这些操作有利于获得驾驶员模型的一组基线参数。然而,ADAS的主要优点是在高速、动态和具有挑战性的操作期间提供支持,其中驾驶员无法提供必要的控制输入以维持安全的车辆轨迹。为了使ADAS在这些紧急操作期间将控制干预与驾驶员无缝集成,需要越来越精确的驾驶员模型。
4 拟解决的关键技术
根据对研究现状及目前存在问题的分析,下面列举了当今在解决驾驶员行为分析及驾驶员建模方面的关键技术。
4.1 纵向驾驶辅助系统驾驶员行为分析[6]
为了理解驾驶员行为的原理,建立一个考虑驾驶员驾驶习惯的纵向驾驶辅助系统,文献[6]分析了驾驶员的响应延迟以及影响普通驾驶条件下驾驶行为的主要因素。为了分析驾驶员行为,作者选择了由NG⁃SIM提供的车辆轨迹数据。利用斯皮尔曼相关系数对影响驾驶员行为的主要因素进行了统计分析,并对筛选后的非平稳状态数据进行了分析。此外,文章还讨论了驾驶员反应延迟的特性。
文章基于指定驾驶状况中的115组车辆数据计算了与vf(跟车速度)-af(跟车加速度)相关的相关系数,并显示了显著的重要性。根据统计结果,作者认为驾驶员首先根据vl(前车速度)和D(距离)控制vf(跟车速度)的趋势,然后基于vr(相对速度)和TTCi(碰撞时间的倒数)实现特定的踏板操作。这意味着可以根据vl(前车速度)和其他参数的变化直接控制车辆的纵向运动,即认为vl和D是影响vf的主要因素,并且驱动器根据vr和TTCi的变化控制af。文章基于车辆轨迹数据分析了驾驶员的响应延迟,发现驾驶员的响应延迟与D正相关,并且驾驶员可能对D的变化比对vl更敏感。此外,不同驾驶员的响应延迟也不同。
4.2 驾驶员辅助系统对驾驶性能和制动行为的影响[7]
文献[7]评估了ADAS对中国驾驶员的有效性以及道路类型、性别和经验对驾驶性能的任何可能影响,这可以通过几个变量来测量,包括纵向、横向和制动行为。研究中使用的ADAS是具有前端碰撞预警(FCW)和车道偏离预警(LDW)功能的Mobileye M630,实验装置如图3所示。结果表明,ADAS显著影响制动行为。当驾驶员暴露于ADAS时,制动时间增加,相对速度降低。ADAS显著影响几种纵向行为,包括纵向减速和时间间隔(THW)。实验中发生了极低的THW。然而,对侧向行为没有显著影响。此外,驾驶员对FCW功能的接受程度远远高于LDW功能,高速公路的接受程度远高于城市道路。结果还揭示了道路类型和经验对驾驶行为的重大影响。

图3 ADAS实验装置[7]
4.3 用于高级驾驶员辅助系统的前馈与反馈集成横向和纵向驾驶员模型[8]
汽车驾驶员建模可分为两大类:纵向和横向控制建模。文献[8]提出了一种基于人体驾驶模拟器实验开发的横向和纵向驾驶员组合模型,该模型能够通过驾驶员模型参数识别出不同的驾驶员行为,见图4。横向驾驶员模型由补偿传递函数和预期组件组成,并与单个驾驶员所需路径的设计相结合。纵向驾驶员模型通过使用相同的期望路径参数与侧向驾驶员模型一起工作,以基于相对速度和到前车的相对距离来对驾驶员的速度控制进行建模。通过考虑驾驶员基于驾驶期望路径的曲率来调节驾驶员驾驶速度的能力,将前馈分量添加到反馈纵向驾驶员模型。纵向和横向驾驶员模型之间的这种互连允许更少的驾驶员模型参数和增加建模精度。经验证表明,所提出的驾驶员模型可以复制各个驾驶员的方向盘角度和速度以用于各种高速公路机动。
5 结束语
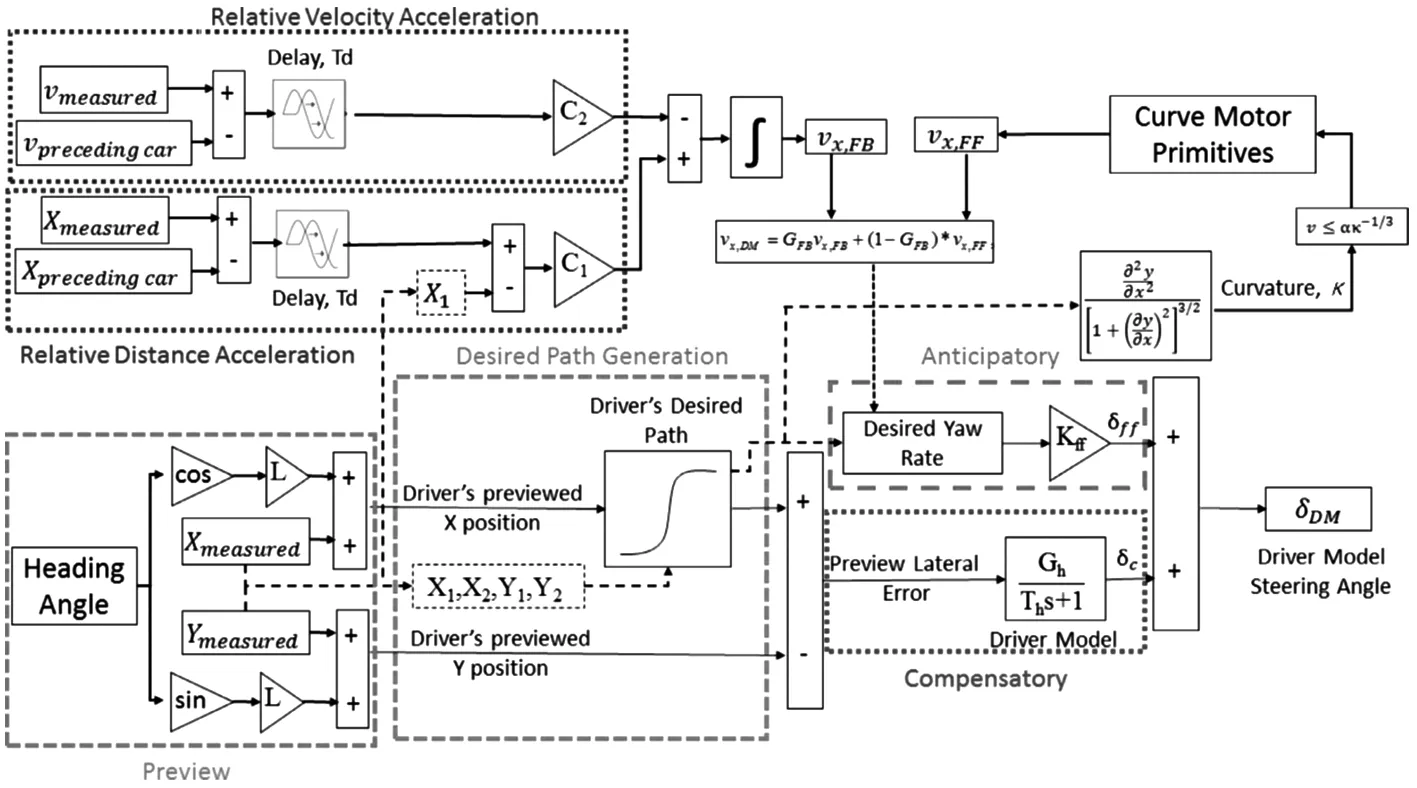
图4 前馈与反馈集成横向和纵向驾驶员综合模型[8]
在驾驶员-车辆-道路闭环驾驶系统中,人为因素造成的交通事故占90%以上,驾驶员疏忽造成的交通事故占70%以上[6]。通过提高驾驶员的驾驶能力,降低驾驶负荷,是减少交通事故的有效途径。先进的驾驶员辅助系统是实现这一目标的有力工具。本文通过高级驾驶辅助系统对驾驶员表现的影响研究,明确驾驶员行为的特点,从而使高级驾驶辅助系统更好地服务于驾驶员行车安全,提供理论基础与研究方向。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
河北理科教学研究(2021年3期)2022-01-18 05:34:24
发明与创新(2021年39期)2021-11-05 07:15:28
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
材料科学与工程学报(2016年1期)2017-01-15 13:33:48
公民与法治(2016年4期)2016-05-17 04:09:26
汽车文摘(2015年11期)2015-12-02 03:02:53