舰船自动舵教学训练辅助系统设计
2019-04-02 09:32:08马海瑞钟云海胡宏灿
实验室研究与探索 2019年2期
马海瑞, 钟云海, 胡宏灿, 蔡 烽
(海军大连舰艇学院 航海系,辽宁 大连 116018)
0 引 言
自动舵是舰船重要的助航仪器,可根据航差角(罗经等导航设备提供的舰船实际航向与指令航向之差)以及航速、海况和装载等参数进行适当的运算后,控制舵机摆动舵叶,从而自动保持或改变舰船的航向[1-3]。自动舵实验室用于训练学员熟悉自动舵的结构、原理及工作过程,掌握舰船操纵的一般规律,为作战训练航行中实施各种复杂机动奠定基础。但实验室条件下,一般较难具备舵机执行机构和实船参与的自动舵工作环境,缺少真实航向信号激励和舵角信号反馈[4-5],无法实现航向自动和舵角随动等基本操纵科目的训练[6-7],限制了装备教学效能的发挥。
为解决上述问题,以训练科目实战化为目标,设计自动舵教学训练辅助系统(以下简称辅助系统),通过调用舰船运动数学模型模拟自动舵在海上的实际操纵环境,与实验室现有某型自动舵装备联动闭环运行,能使学员熟悉舰船摆舵后的运动状态变化规律,理解自动舵各种操纵方式的适用时机,掌握舰船的基本操纵性能,锻炼应对复杂操纵情况的能力。
1 自动舵教学训练辅助系统工作原理
辅助系统主体功能结构如图1所示。基于便携式工控机构建教学训练控制台,在控制软件中调用舰船运动数学模型,以初始航向、航速和舰位(经纬度)为基础,通过设定舰船主机速级控制舰船航速变化,并利用采集的舵角反馈信号进行舰船运动参数解算,将实时更新的航向信息通过RS-422串口形式输出,经数字-轴角模块变换为自整角机转角信号并进行功率放大后,发送给自动舵主控制器参与操舵控制并输出舵令信号;设计适当的外围硬件接口电路和控制部件,采用直流伺服电动机作为执行机构带动模拟舵叶摆动,舵角信息经反馈发送器反馈至控制台和自动舵主控制器用于计算舵差角;将实时舵角、航向、舰位以数字和曲线图的方式在软件界面中显示,并按照NMEA 0183协议将经纬度、航速和航迹向等信息组织为标准语句,通过RS-422等串口形式向电子航海图系统等外部设备发送。

图1 辅助系统结构与功能框图
图1中,“自动舵”虚线框内为实验室原有装备组成,“电子航海图系统”可接收辅助系统生成的NMEA 0183语句,以便制定与执行计划航线,直观监视自动舵控制下的舰船航向、航速和航迹等运动响应,其余框图为辅助系统的软硬件功能结构。
2 硬件设计
2.1 教学训练控制台
教学训练控制台为辅助系统的核心,实现初始参数装定、车钟速级设置、舵角信息采集和舰船运动参数解算输出等主体功能。控制台工控机的多个串口分别用于执行采集舵角、输出航向和输出NMEA 0183语句等任务;HDMI双屏输出支持在显示器和投影屏幕上实时显示训练参数和舵角、航向等动态曲线;鼠标键盘用于人机交互时的点选或输入操作;双网口可用于模拟综合舰桥等后续网络化功能扩展。
2.2 罗经信号单元
为满足自动舵的接口要求,辅助系统中的舰船航向信号应与真实罗经装备具有相同的电气特性[8]。实验室某型自动舵主控制器仅能接收自整角机转角形式的航向信号,而控制台根据舰船运动模型解算出的航向信息为包含在串行通信语句中的数字量,需经变换后才可发送给自动舵。
图1中航向信号转换模块用于接收来自控制台的数字航向信号,通过微处理器解析并转换成12位并行数字量后送给DSC模块形成自整角机信号,发送给航向信号功放模块。
航向信号功放模块将来自航向信号转换模块1°/转的自整角机信号经耦合变压器送入放大板的输入端,经放大后通过变压器输出至分罗经控制绕组的连接器端,驱动自动舵上的航向分罗经工作。放大板输出回路中装有保险丝,可防止功放器件因过载而损坏。
2.3 模拟舵机和舵叶
实际舰船多采用液压舵机系统,通过2个电磁阀控制液体流向,从而控制舵叶的摆动方向[9]。辅助系统通过2个多触点继电器代替电磁阀控制直流伺服电动机带动模拟舵叶转动,从而模拟舵机油泵及活塞的正反向运动;舵角的大小和方向通过舵角反馈发送装置检测并转换为RS-485形式的信号,输出至自动舵主控制器和教学训练控制台参与控制和解算。在模拟舵叶摆动行程两端设置左右限位开关,用于将舵叶摆幅限制在左右35°的满舵舵角范围内。
3 软件设计
控制软件内嵌运行于教学训练控制台,其界面可根据功能划分为初始参数装定、车钟速级设置、参数监视和运行控制等区域,如图2所示。该软件在图形化编程环境LabVIEW中开发,并采用状态机设计模式。各状态分支在执行某项操作后,通过向While循环的移位寄存器传递指令的方式指定状态机的下一个状态。初始化完成后,状态机转移至“等待事件”状态,该状态通过事件结构等待用户界面操作。如用户单击“装定航向”按钮或改变“左车”速度等级时,会切换至事件结构的相应分支,继而由该分支按照预定的决策逻辑发起状态转移。该模式便于定义各代码段的执行序列[10],且代码段可按需随意增减,可避免功能扩充时程序结构的大幅改动。
控制台软件完成的主要任务如下:

图2 控制软件主界面
(1) 参数装定。装定初始航向、航速和舰位等舰船初始参数,设置主机速级,支持分车或错车运行。
(2) 舵角信号采集。通过RS-485串口接收舵角反馈发送装置送来的舵角信号。
(3) 舰船运动参数更新解算。根据舰船运动数学模型计算航向、航速、航迹向及推算实时舰位。
(4) 航向信号发送。通过RS-422串口向航向信号转换模块中的单片机系统发送数字航向信息。
(5) 运行控制。通过界面中的相应的功能按钮控制辅助系统在运行、暂停和停止等状态间切换。
(6) 综合显示。用数值控件显示各种装定参数、实时运行参数;用图形控件显示舵角变化曲线、航向变化曲线和舰船航迹线等。通过RS-422串口输出的符合标准协议的语句可用于激励电子航海图系统或导航仪,便于执行设计的计划航线并监视自动舵控制下的舰船航迹。图2中航迹线为模拟某型舰在舟山海区占领阵位和旋回机动时的运动轨迹;图3为“两车进三”速级时自动操纵方式下航向受舵角控制的PID曲线。
3.1 舰船运动参数解算
舰船运动参数解算是通过调用舰船运动数学模型实现的。辅助系统采用舰船5自由度机动模型[11],调用的主要函数见表1[12]。


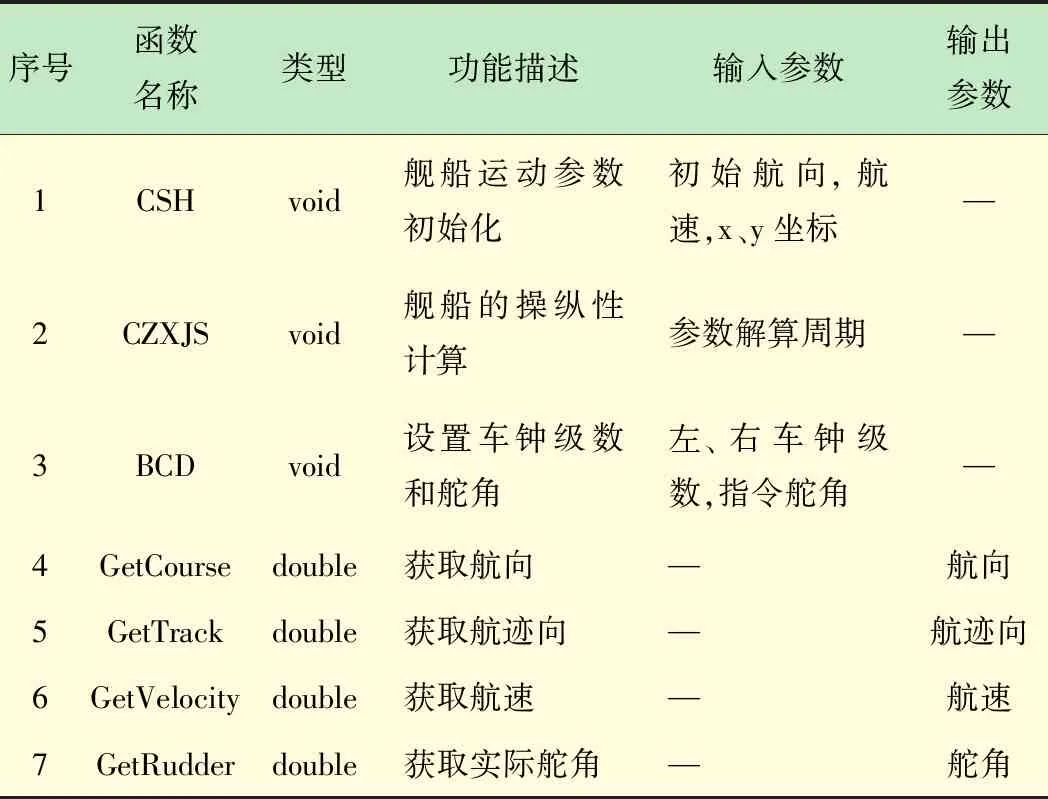
图3 舵角与航向曲线
舰位更新模块根据墨卡托投影海图的特点,将航速按航迹向的正余弦分解为北向和东向分量,在参数解算循环周期内,将东西距与中分纬度进行运算,得到本周期的舰位纬差和经差,与循环起始时刻的舰位叠加得到舰船实时经纬度,其LabVIEW程序代码如图4所示。
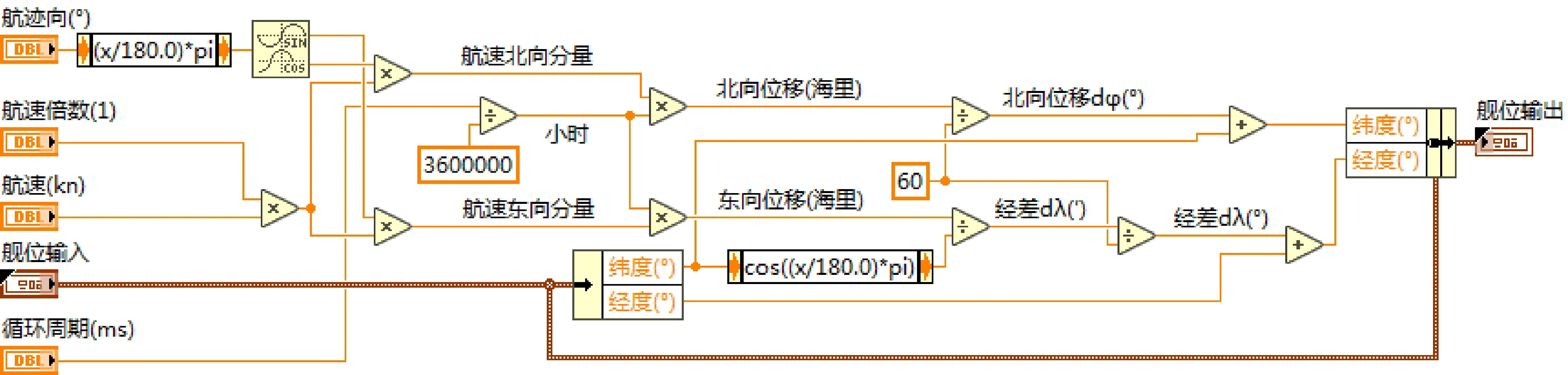
图4 舰位更新解算程序代码
3.2 计划航线执行与监视
为便于设计计划航线,辅助系统的输出信息兼容卫星导航仪和电子航海图系统。通过与二者的有机整合,可在充分研究海区的前提下,直接在其海图显示区根据海区情况和想定方案准确、方便地制订航行计划,还可进行高效的航线档案管理和航线安全性评估。
实验室某型电子航海图系统的数据接口采用遵守NMEA 0183协议的GPRMC语句,形如[13]:
$GPRMC,113842.00,A,3610.11167,
N,12046.14011,E,18.059,124.6,
080817,5.0,E,A*0F
该语句包括时间、纬度、经度、航速、航向、日期、磁差、定位状态和校验码等数据段。
程序调用数值函数将经纬度分离为度分秒并转换为构造语句所需格式,配合字符串函数将其他信息整合并校验[14],其LabVIEW程序代码如图5所示。

图5 GPRMC语句生成程序代码
针对开阔海域直航、狭水道、离靠码头、频繁机动和导弹火炮攻击等不同时机,可结合自动舵的自动、随动和简单等多种操纵方式灵活地设置训练科目内容。在计划航线执行的训练过程中,支持到达报警、偏航指示与报警功能,使学员掌握航线执行、偏航处理、到达转向点处理和航线临时调整等各种态势下的应急处置能力[15]。
3.3 串口通信
串口是辅助系统信息交互过程中采用的主要通信方式,包括教学训练控制台采集自动舵反馈舵角、向航向信号转换模块发送航向以及向电子航海图系统发送NMEA语句等。以舵角采集程序为例,利用LabVIEW VISA串口函数读取舵角反馈发送装置以RS-485协议发出的舵角语句。因每次舵角更新时语句均以CR/LF(回车/换行)字符结尾,故在“VISA配置串口”函数调用时启用了终止符0xA(换行符的16进制表示)[10],以保证每次均能读得完整语句,其基本程序框图如图6所示。

图6 采集舵角串口通信程序
此外,在状态机的“错误处理”分支,针对串口数据帧异常、读取超时等常见错误进行处理,必要时直接迁移至“初始化”或“等待事件”分支并向用户发出提示,提升串口通信模块的可靠性和人机交互的友好程度。
4 结 语
辅助系统通过科学合理的设计,将自动舵、电子海图等实验室装备无缝整合,显示直观、操作简便、运行稳定,可通过控制台显示器和投影屏幕实时显示舵角及自动舵控制下的舰船航向、航迹变化曲线,直观感受舰船操舵响应,还可通过电子航海图系统细致观察航线执行情况,选用不同的舰船运动模型即可在实验室中实现不同舰型的操纵体验,有效地实现了“自动舵-舰船-罗经”的闭环联动运行,在不破坏自动舵装备原有结构的前提下,从根本上解决了实验室无实船环境条件下进行操舵训练的难题,为自动舵操作使用和实战化训练提供了良好平台。已应用于舰艇航海指挥等专业的课程教学训练,明显提升了相应科目教学的科学性和有效性,对于提高学员的任职能力具有很强的实用性。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:07:10
江苏船舶(2021年4期)2021-09-28 08:09:10
舰船科学技术(2021年8期)2021-09-18 08:36:06
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
舰船科学技术(2021年12期)2021-03-29 01:28:44
舰船电子工程(2020年4期)2020-06-19 06:14:48
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
电子制作(2017年24期)2017-02-02 07:14:16
舰船科学技术(2016年1期)2016-02-27 15:39:26
中国水运(2015年2期)2015-04-23 15:04:07