钻 孔 轨 迹 探 测 实 验 仪 研 制
2019-04-02 09:31:28屈召贵龚名茂
实验室研究与探索 2019年2期
屈召贵, 龚名茂, 周 策
(1.四川工商学院 电子信息工程学院,成都 611745;2.中国地质科学院 探矿工艺研究所,成都 611734)
0 引 言
在矿产资源勘探和地质监测过程中,需要通过钻孔了解地质信息。钻孔倾斜测量是钻探施工中重要的测试项目,是保证钻孔顺利进行的依据。随着勘探工作逐渐朝着深部发展,钻井内的温度、压强也在不断增加,在一般地区,钻井深度达到8 km时,其温度将达到250 ℃,在地温梯度异常的干热岩地区,温度还将更高。而现有技术中用于测斜仪器只能适用于250 ℃以下的环境测斜,随着钻井深度增加,井内压力也在增加,仪器设备的功耗增加,极大地限制了深井资源的开采[1-5]。因此提供一种耐高温、高压、高精度、低能耗的钻孔轨迹探测仪十分必要。基于此,本文提出间歇式智能电源管理解决设备功耗,减小散热;利用高强度新型材料设计保温管和承压外管,解决280 ℃、120 MPa环境;选择光纤蛇螺、耐高温元器件,解决方位角测量范围与精度为0~360°(±1.5°,井斜>3°);井斜测量范围0~90°(±0.15°)的井孔轨迹测量。
1 干热岩地层钻孔测斜仪原理和构成
超高温钻孔轨迹测量仪系统主要分为地面部分和井下部分。地面部分主要包括地面计算机、测井绞车和深度计,其中地面计算机中安装有仪器配套测量软件,主要实现测量数据的显示和管理以及井身轨迹的绘制等功能。井下部分为仪器的核心部分, 主要包括存储式陀螺测斜探管、耐压耐温复合保温外管以及防震导向接头、扶正器等。系统主要涉及井下存储式陀螺测软硬件和地面软件。
1.1 钻孔测斜仪原理
陀螺寻北仪根据采样和解算方式不同可分为连续转动方案、多位置方案和二位置方案,其中二位置方案由于其寻北时间短,易于实现而广泛得到应用。二位置寻北仪是利用在相位差180°的两位置上对陀螺和加速度计采样,通过抑制共模干扰信号的算法消除陀螺和加速度计的常值漂移和零位误差,从而得到较高精度的载体与真北方向的夹角[7-9]。
建立姿态坐标系如图1所示。载体坐标系:横轴向右为Xb轴的正方向,纵轴向前为Yb轴的正方向,铅垂轴向上为Zb轴的正方向,原点为寻北仪的质心。地理坐标系:取东为Xg轴的正方向,北为Yg轴的正方向,铅垂轴向上为Zg轴的正方向,原点为寻北仪的质心。Ax和Ay为加速度计。
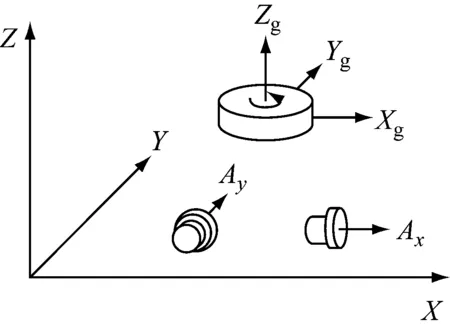
图1 寻北姿态坐标系
由导航学旋转变换中的欧拉定理可知,地理坐标系到载体坐标系的变换矩际如下式所示。
(1)
式中:绕方位轴Z轴旋转角度为Ψ(航向角),绕X轴旋转角度为θ(俯仰角),绕Y轴旋转角度为γ(横滚角)。依次对应井斜测量的方位角、倾角和工具面角。
载体坐标系和地理坐标系中的重力关系如下式所示。
(2)
式中:g为重力加速度;ax、ay、az分别为重力加速度在地理坐标系的投影。
式(3)为倾角,式(4)为工具面角。
真北方向计算,
(5)
式中:ωx、ωy分别X轴Y轴方向的角速度;φ为地球纬度。令Θ=ωiecosφ,其中ωie为地球自转角速度;φ为被测点地球纬度值[9-12]。
综上所述,通过角速度和加速度传感器分别测出ωx、ωy、αx、αy的数据,通过解算,即可获取载体的姿态,达到寻北目的。
1.2 测斜实验仪系统的组成分析
整个系统包括孔内探管和地面数据读取处理软硬件,如图2所示。孔内探管主要包括耐280 ℃高温和30 MPa压力的承压管、保温管和测量单元测斜仪机芯构成。机芯由光纤陀螺组件、温度传感器、控制器、电源、吸热体、存储器、通信电路等构成。
2 测斜实验仪的硬件设计与实现
主控器电路板结构主要承担光纤陀螺测斜测温探管的电源控制、数据存储、探管外温度测量等功能,如图3所示。
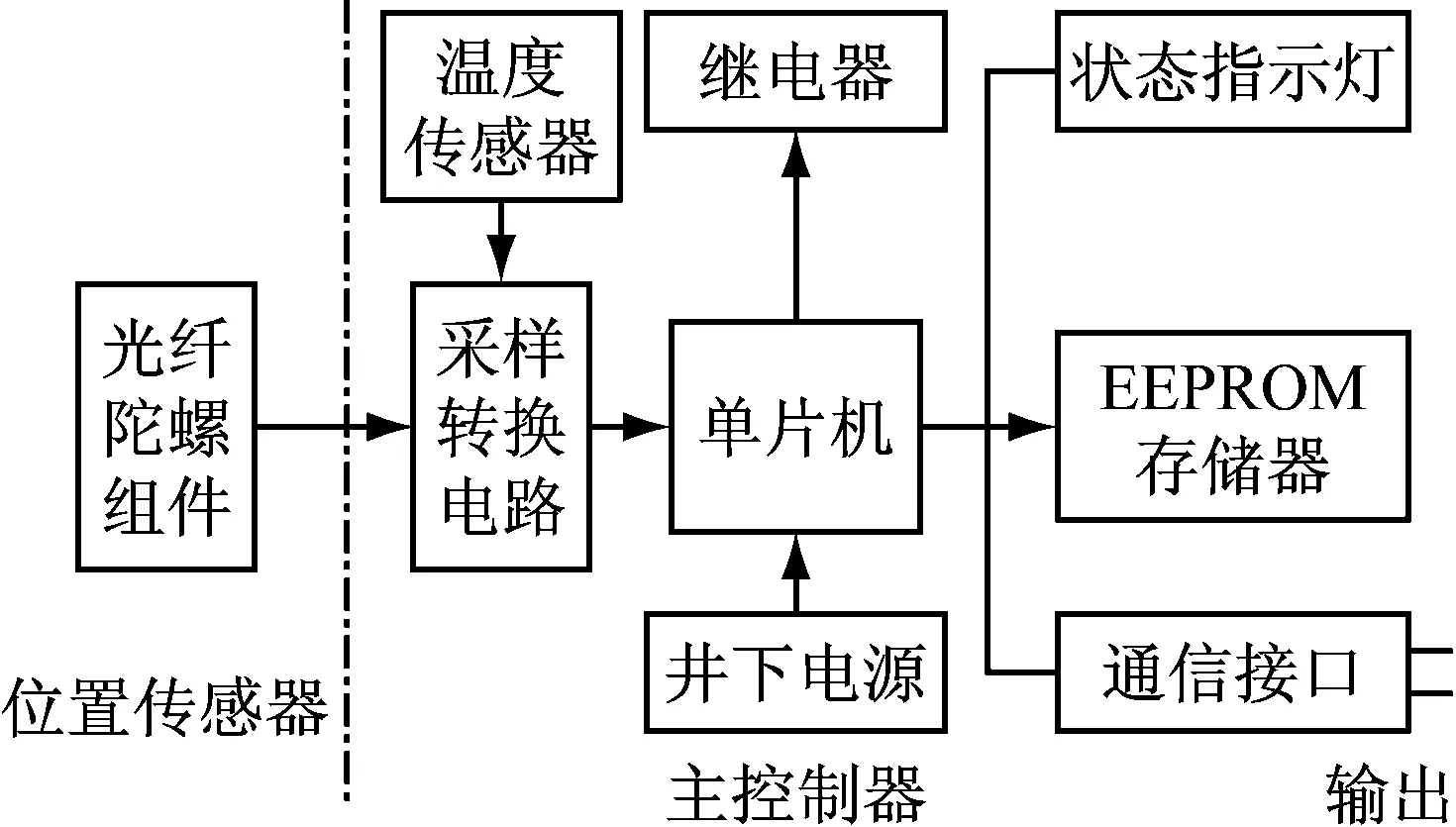
图2 系统框图
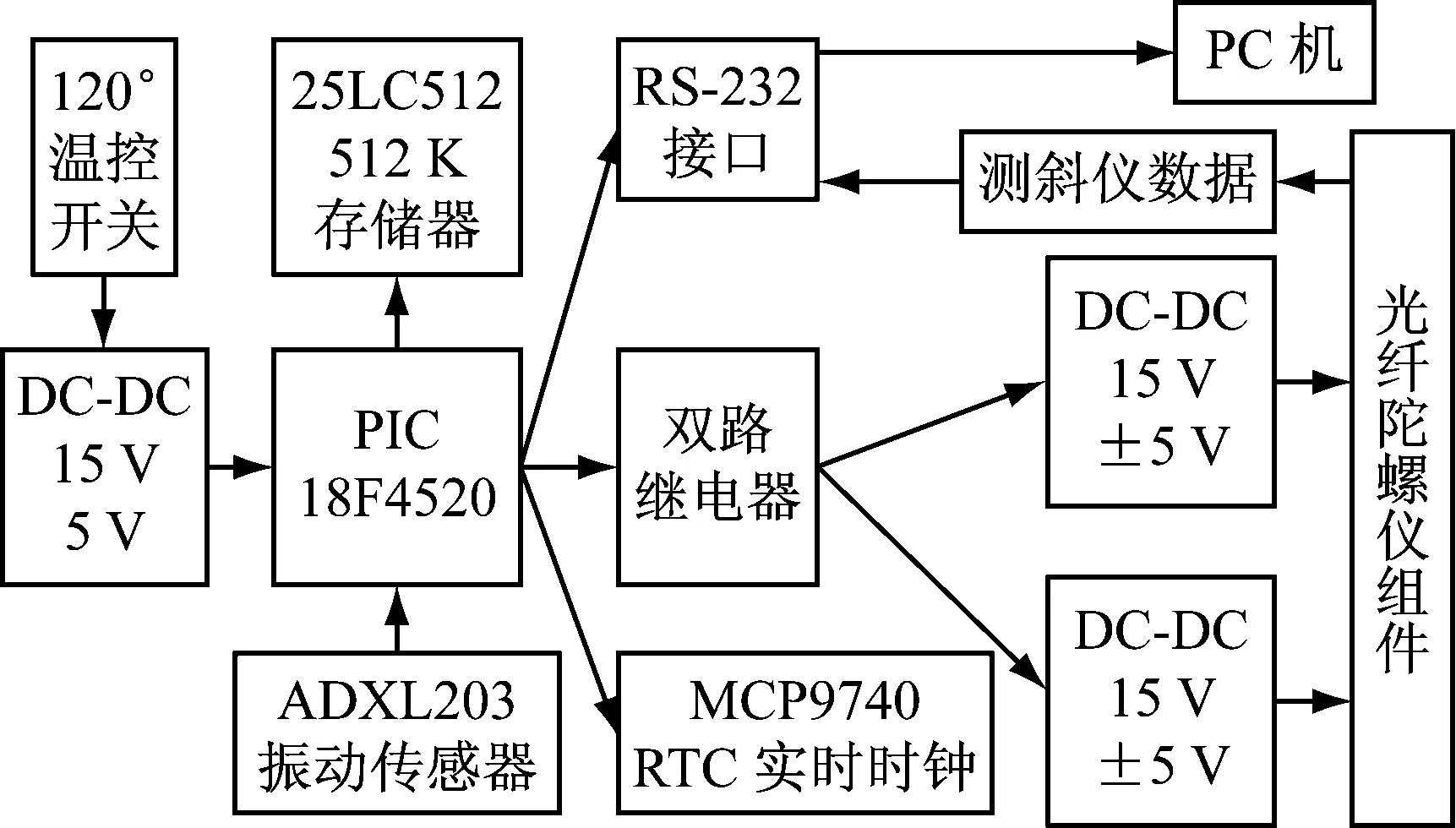
图3 主控电路图
2.1 主控制器元器件选择分析
单片机选用Microchip公司的PIC18F25K80单片机,其工作温度范围为-40~150 ℃。内置32 Kbyte Flash存储器、12 Bit ADC、16 Bit定时器等外设,能满足本项目的要求。通信接口使用RS-232通信,芯片选用ADI公司的工业级RS-232芯片,其工作温度范围为-25~125 ℃。实现主控制器与光纤陀螺组件通信和主控制器与PC机通信,其电路如图4所示。存储器选用MicroChip公司的SPI接口EEPROM存储器25LC1024,该存储器温度范围达-40~150 °C,容量为256 Kbits,按照测量模块每组数据42 Byte计算,一共可存储3 160组数据。存储光纤陀螺组件传送的姿态参数和温度参数,电路如图5所示。

图4 通信电路图
外部温度测量部分,使用高精度的Pt100温度传感器及专用Pt100测温转换器MAX31865芯片,该芯片可以直接通过SPI接口输出Pt100的实际温度所对应的二进制补码,通过转换即可输出温度。
2.2 电源管理电路设计与实现
电源管理主要是解决整个测量系统的供电。由于系统使用高功率、一次性、便携式电池,对于电池能量、体积要求非常高。采用智能化间歇供电方式,以降低功耗、减小温升、提高电池的使用时间。当探管机芯在下放的过程中,要求光纤陀螺组件处于断电状态,当下放到指定高度停止时开始供电,使其工作。光纤陀螺需要±5 V和±15 V电源,设计中利用ADXL203加速度计进行振动检测(静止与振动),通过继电器管理。继电器选用宏发的高温继电器HF-32-A,其电流可达2 A,温度范围为-25~125 ℃,符合环境要求。高温电池型号为4ER34615S,由4只锂/亚硫酰氯(Li-SOCl2)电池串接而成,其单只电池开路电压为3.65 V,容量达12 A·h,且工作温度范围-40~165 ℃。电路如图6所示。
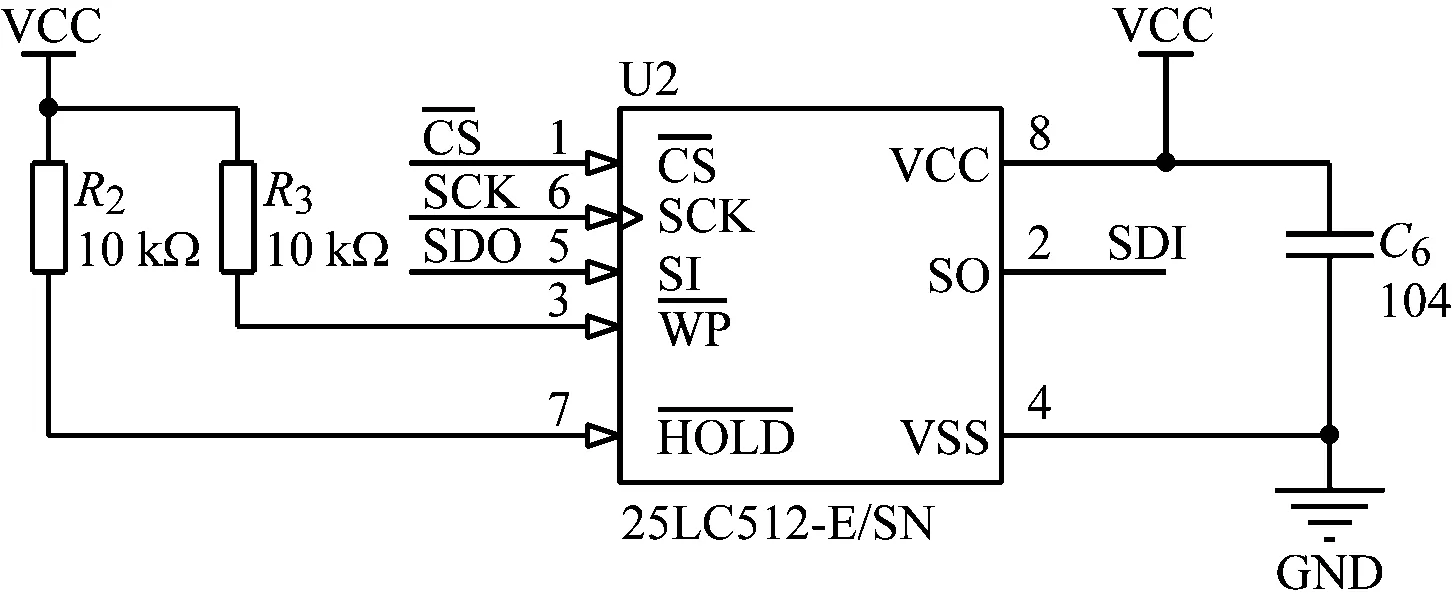
图5 存储电路图
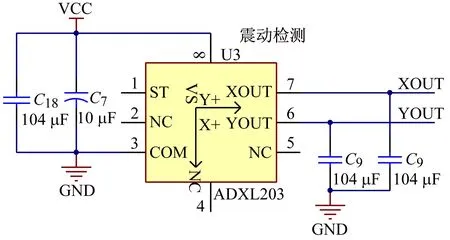
(a) 振动检测电路

(b) 电源控制电路
3 测斜实验仪的软件设计与实现
系统软件主要由上位机软件和探管机芯主控制器软件构成。上位机软件主要用于参数设置和数据导出等功能;探管机芯主控制器软件包括光纤陀螺参数获取、管外温度采集、电源管理、数据存储与通功能。
上位机软件功能模块主要包括:①用于连接和数据信息传输的串行通信模块;②用于读出存储在探管存储器中的姿态参数;③用于给测量探管的参数设置模块;④用于方便用户使用的使用说明模块。上位机软件系统结构如图7所示,主要包括串口通信、读取数据、参数设置、使用说明等6个模块。
主控制器程序主要包括自动测量、等间隔测量、定时测量3个流程。自动测量:连续测量;等间隔测量(时间间隔开关测斜机芯电源测量);定时测量3个流程(定时开关电源),如图8所示。
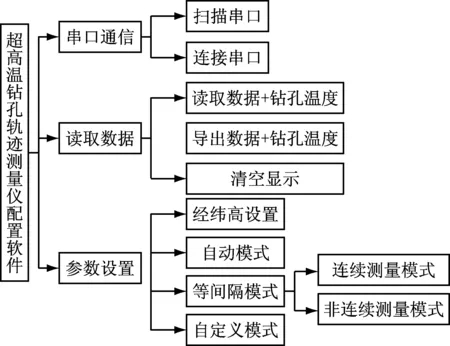
图7 上位机软件结构图

图8 主控制器流程图
4 承压管和保温管机械结构设计与实现
机械结构设计主要由承压外管、保温内管两部分,开展承压外管、保温内管的加工试制和室内测试。用于干热岩地层的钻孔测斜仪传感器组件装配。
①承压外管规格。内径φ60 mm、外径φ73 mm、有效长度2 680 mm;
②保温探管规格。内径φ45 mm、外径φ58 mm、有效长度2 440 mm;
③保温性能。环境温度300 ℃,工作4 h,管内温升<80 ℃;
④耐压120 MPa;
⑤内外壳直线度≤0.8 mm;
⑥使用寿命≮5 a;
⑦抗冲击:100 g,11 ms(1/2 sine);
⑧平均故障间隔时间(MTBF)≮1 000 h。
4.1 承压外管管体设计与校核
承压外管管体机械设计图如图9所示。
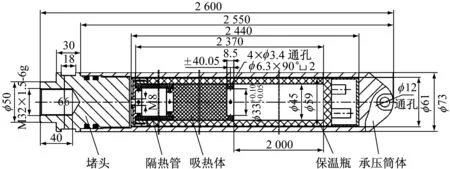
图9 承压外管图
承压探管壁厚计算公式如下式所示:
(6)
式中:σmax为承压探管材料屈服强度,MPa;D为承压探管外径,mm;d为承压探管内径,mm;p为承受外压,MPa;n为安全系数,值为1.2~1.5,一般取1.3。
承压外管尺寸外径D=73 mm,内径d=61 mm。承压外管选择17-4PH沉淀型硬化型不锈钢,弹性模量为200 GPa,泊松比为0.3,屈服应力为355 MPa,屈服极限为1 180 MPa。承压外管所需承受外压外压p=120 MPa;校核时安全系数取n=1.3。将以上所选取的参数值代入式(6),可得到σ=895.43 MPa。
所以σmax=1 180 MPa大于895.43 MPa,承受外压管材尺寸及相关参数选择是合理的。
建立承压探管模型进行有限元分析,可得到壁厚为6 mm时,承压探管的内部应力分析为合理,也满足外界环境条件要求。
4.2 保温探管设计与校核
保温探管机械设计图如图10所示。由压盖、堵头、隔热管、上吸热体、瓶体、下吸热体构成。保温探管对温度的控制效果是通过温度场与压力场进行耦合分析,确保设计的合理性。通过计算内管壁导热、隔热塞漏热、辐射漏热和残余气体漏热可得容器的总漏热φ=3.315 W。蓄热体长度为400 mm,经计算探管蓄热量Q=90.432 kJ。由此可计算机保温时间t(h),
(6)
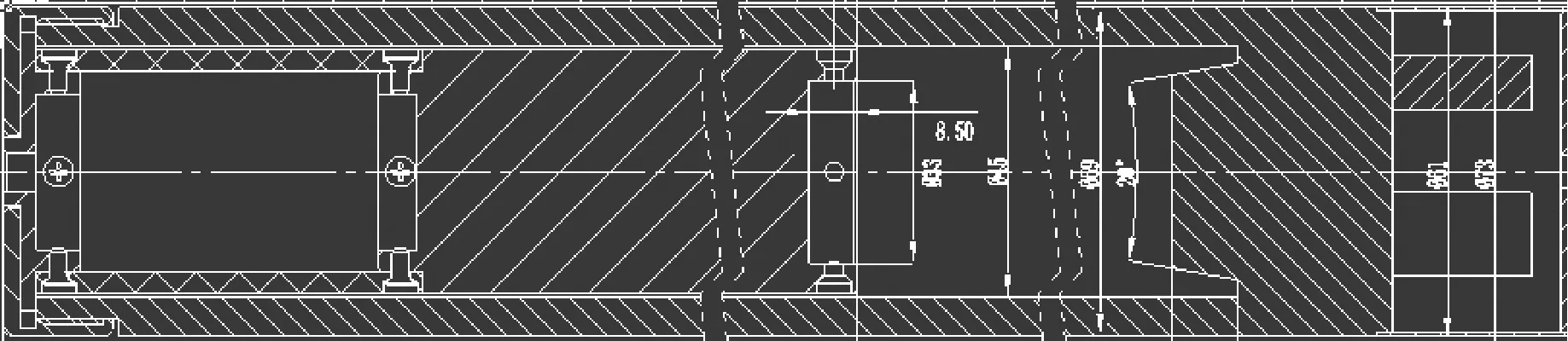
图10 保温探管图
理论上,蓄热体在保温时间4 h内,能满足Δt≤80 ℃。实际上传入保温瓶内的热量不可能立即全部被保温瓶贮存,所以设计应有足够余量。施加温度边界条件:温度300 ℃,求解温度场,并将温度场结果导入静力学结构分析;施加围压载荷30 MPa,并进行约束。通过有限元分析仿真,设计符合要求。
5 系统测试
5.1 姿态参数测试
现场测试姿态参数如表1所示。由于该井没有其他测斜数据参比,采用通过两次测试数据比较,可以看出仪器测量的顶角结果重复性较好,在0.2°之内,方位角数据在顶角小于3°时的误差是比较大的,在顶角大于3°时,方位角上测与下测的偏差在2.5°范围内。

表1 方位角和倾角实测值
5.2 井深与温度测试
通过仪器存储的数据和仪器到达井底的时间对应关系,测得该井井底3.7 km处的温度为207 ℃,加上起下钻和技术性停待,实际测量时间超过43 h。取样频率为1点/10 s,取得了测温原始数据15 427组;超高温温度测量单元由9 ℃上升至207 ℃,温升198 ℃,测得井底温度为207 ℃。将井深与井底温度对应,得到如图11的井深-井温的连续测量曲线。仪器已通过测试检定,测温精度达到±0.15 ℃,测量范围为0~280 ℃。
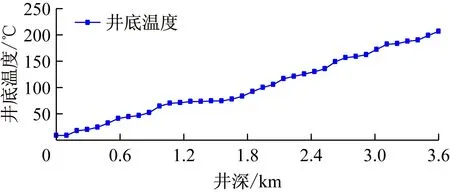
图11 井深-井底温度实测曲线
6 结 语
测斜实验仪机芯选用耐高温等高新技术产品作为其测量元件,采用间歇供电技术以减小能耗和散热。在设备外形结构上,采用新材料设计承压外管和保温探管,并利用ANSYS有限元分析软件对设计的承压外管结构进行强度校核,对保温探管进行温度场与压力场进行耦合分析。通过设计、校核与测试表明,设备能在环境温度280 ℃、压强120 MPa的条件下工作;顶角范围0~90°,精度小于0.5°,方位角测量范围在0~360°,精度小于2.5°;温度范围和精度:0~280 ℃,±1 ℃;消除了机械框架陀螺测斜仪的累计误差,提高了测量精度;并解决了供电节能和数据存储等问题,具有应用价值。
猜你喜欢
通化师范学院学报(2024年2期)2024-03-01 08:39:08
铀矿地质(2022年1期)2022-01-27 14:24:08
煤气与热力(2021年5期)2021-07-22 09:02:16
中国外汇(2019年10期)2019-08-27 01:58:02
模具制造(2019年4期)2019-06-24 03:36:42
石油钻探技术(2017年6期)2018-01-15 01:51:56
魅力中国(2017年34期)2017-09-11 10:49:34
化工设计(2017年2期)2017-03-05 10:04:30
时尚北京(2017年1期)2017-02-21 17:02:55
石油化工(2015年9期)2015-08-15 00:43:05