舰载无人直升机自主着舰方法研究
2019-03-30 02:53:46吴鹏飞石章松闫鹏浩
舰船科学技术 2019年3期
吴鹏飞,石章松,闫鹏浩
(1. 海军工程大学,湖北 武汉 430033;2. 海军航空大学,山西 长治 046000)
0 引 言
舰载无人直升机是装备在舰船上的无人飞行器,主要用于执行战场侦察、电子对抗、炮火校正、瞄准打击、中继制导等危险任务[1]。舰载无人直升机具有重量轻、体积小、无人员伤亡、部署方便等优点,可在复杂的气象、海况条件下使用,且不受飞行人员体能消耗的局限。舰载无人直升机自主着舰是指无人直升机依赖机载的导航和控制系统来进行定位引导并最终控制其降落在舰船上的过程。自主着舰使无人直升机降低了对舰船辅助设备的要求,尤其在战场环境下,舰船遭受打击破坏时,更能体现出自主着舰具有的重要意义。
随着现代海战的发展,我国舰艇编队的日益成熟,无人直升机自主着舰的技术需求越来越迫切,而国内目前对无人直升机自主着舰的研究较多存在于理论研究中,工程应用较少,与国外存在很大差距,因此,更加成熟的舰载无人直升机自主着舰方法研究已经提上日程。
1 现 状
近年来,随着舰载无人直升机的迅速发展,相应的自主着舰技术也逐渐展开,无人直升机自主着舰系统复杂、涉及学科范围广、技术难度高,在全球范围内仅少数国家实现了无人直升机自主着舰[2]。典型的案例有法国SADA系统引导S100无人直升机在5级海况下于“蒙特卡姆”号驱逐舰上成功着舰(见图1);美国的火力侦察兵于2006年实现了自主着舰;奥地利S100无人直升机采用差分GPS在许多国家舰船上实现自主着舰。目前国外自主着舰的引导方法主要分为卫星引导、雷达引导和光电引导3类[3]。其原理是利用不同的传感器测量机舰相对位置,计算飞行控制所需的位姿参数,引导无人直升机顺利着舰。而国内目前没有无人直升机自主着舰的实例。
2 无人直升机自主着舰流程
2.1 总体流程
结合无人直升机自主着舰实际,可以将无人直升机自主着舰过程分为3个阶段:1)无人直升机自主返航接近舰艇,直至位于舰艇附近一固定点并与舰艇同速同向飞行;2)无人直升机以水平侧飞的方式飞行到降落平台正上方;3)无人直升机相对于航行中的舰艇择机垂直降落[4]。其着舰过程如图2所示。

图 2 无人直升机着舰过程Fig. 2 The process of unmanned helicopter autonomous landing
无人直升机着舰过程中着舰系统总体工作流程如图3所示。
2.2 各阶段工作流程
在着舰第一阶段,采用差分GPS引导无人直升机飞行,直至进场点,系统工作流程图如图4所示。
在引导无人直升机返航后,无人直升机联合多传感器对着舰环境进行感知,然后在着舰过程中根据环境特征信息对无人直升机进行相对位姿估计,并根据位姿信息控制无人直升机飞行,着舰第2和第3阶段系统工作流程如图5所示。
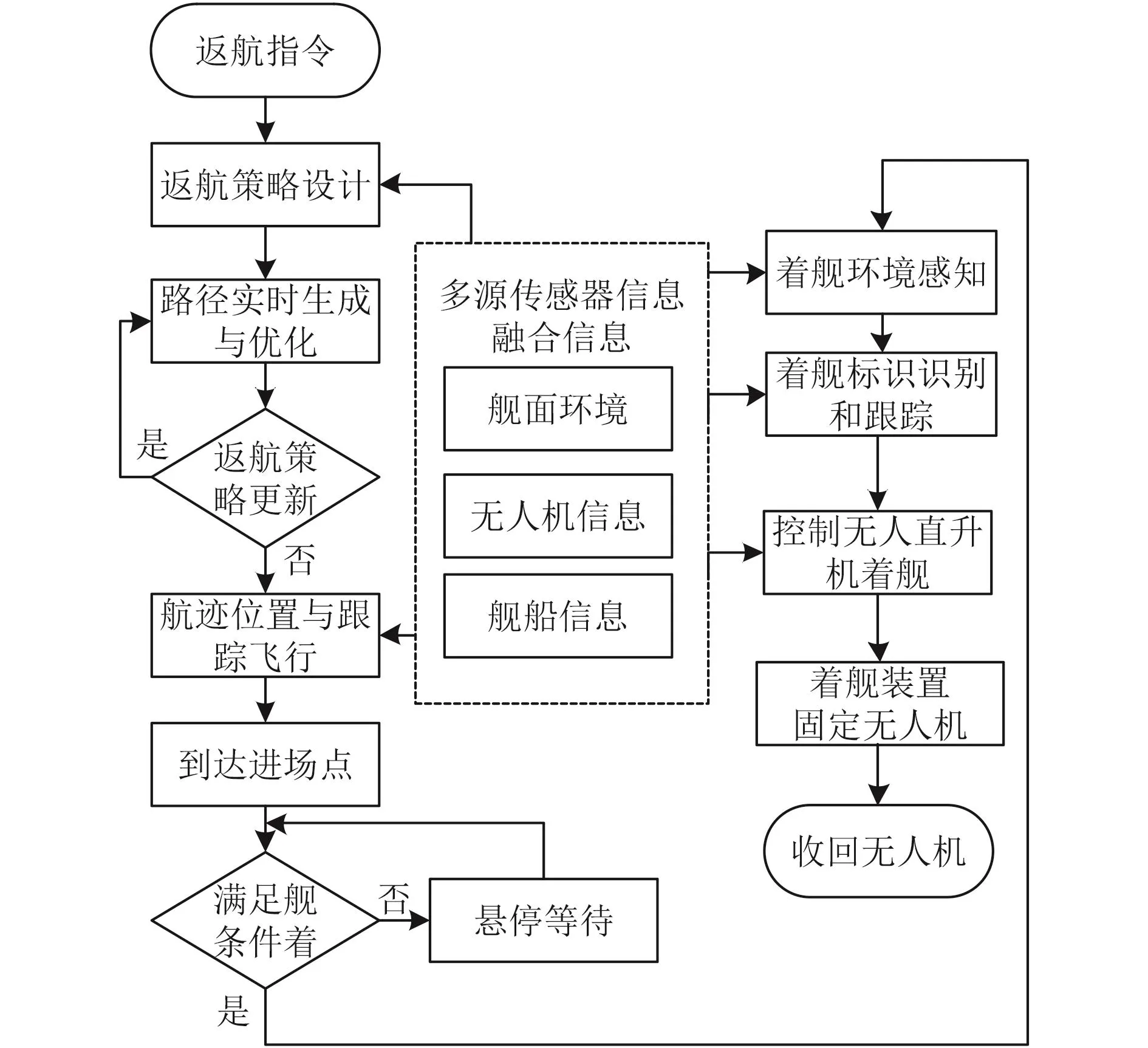
图 3 无人直升机自主着舰工作流程Fig. 3 The working process of unmanned helicopter autonomous landing

图 4 着舰第一阶段系统工作流程图Fig. 4 Flow chart of the first stage of landing system

图 5 着舰第2和第3阶段系统工作流程图Fig. 5 Flow chart of the second and third stages of landing system
3 系统模块组成
根据无人直升机自主着舰流程,可以将无人直升机自主着舰系统设计成几个模块(见图6),包括差分GPS引导模块、环境感知模块、位姿估计模块和着舰控制模块。
3.1 差分GPS引导模块
差分GPS是目前GPS测量中定位精度最高的定位方法,又叫相对定位。通过在降落舰船上安装基站,无人直升机在返航过程中接收基站发送的改正数,并对GPS测量结果进行改正以获得精密定位的结果。差分GPS引导模块其实是联合差分GPS和IMU(惯性测量单元)的引导模块,通过差分GPS和IMU对无人直升机进行位置和姿态估计,并将位姿信息传递给控制系统控制无人直升机飞行,图7为基本差分GPS系统组成。

图 6 自主着舰系统组成Fig. 6 Composition of the autonomous ship system

图 7 基本差分GPS系统Fig. 7 Basic differential GPS system
3.2 环境感知模块
环境感知模块将多个环境感知传感器集成到一起,包括激光雷达和视觉传感器等。它的作用是融合多传感器信息对舰艇环境进行感知,识别出着舰环境中的障碍物和着舰标志等环境信息,在环境信息中提取出可利用的特征信息对无人直升机进行导航[5]。联合多传感器可以提高环境感知速度和准确度,进而提高位姿估计精度。将多传感器进行集成可以减小传感器的重量和体积,以减轻无人直升机的负载。
3.3 位姿估计模块
位姿估计模块是根据传感器信息对无人直升机的位置和姿态进行解算,着舰第1阶段的传感器信息为差分GPS和IMU的量测信息,着舰第2和第3阶段的传感器信息为激光雷达、视觉和IMU的量测信息。无人直升机要真正实现自主着舰,必须在位姿估计模块中嵌入SLAM算法框架。“同步定位与地图构建(SLAM)”技术主要解决无人平台的位姿估计问题与环境特征的定位问题,是实现无人系统真正自主的关键[6]。一个完整的无人平台同步定位与地图构建问题处理过程如图8所示。

图 8 SLAM处理流程Fig. 8 The SLAM process
3.4 着舰控制模块
目前我国控制直升机着舰的方法大多为PID控制,这种方法设计过程透明,原理清晰明了,简单实用,设计人员依靠丰富的设计经验,使用多样化的调参方法,可以设计出性能比较好的飞行控制系统。但是,无人直升机自主着舰对控制系统的精度和鲁棒性要求很高,尤其在高海况条件时,经典PID方法难以满足控制性能的要求。要实现无人直升机安全地自主着舰,则要求其在保证环境信息感知准确的前提下能够结合自身运动状态完成对飞行轨迹的合理控制,考虑在控制模块中加入甲板预估器[7]。通过甲板运动预估器确定最佳的下降时间,然后控制无人直升机速率使之以最佳状态着舰。
4 关键技术
在无人直升机自主着舰3个阶段中,基于差分GPS的引导返航技术目前已经成熟,能够在开阔的环境下引导无人直升机实现较高精度的导航,后2个阶段中由于着舰环境时刻处于运动之中,且存在较为复杂的动态影响因素,因此面临较大的困难与挑战,目前还极少有成熟的处理方案,其中涉及的关键技术包括多传感器的数据融合技术、着舰环境的感知方法、无人直升机的相对位姿估计方法和着舰控制技术。
4.1 多传感器的数据融合技术
IMU、GPS、视觉和激光雷达等传感器,由于在无人直升机上的安装位置不同、探测原理差异等原因,获取的原始数据处于不同的相对参考系下,且数据的采样频率不一,因此需要进行数据的时空对准预处理。在对环境进行探测感知的过程中,核心传感器是视觉传感器,考虑处理器运算能力以及通信带宽,目前图像传感器的处理频率最高约10 Hz,GPS信号的采样与处理频率可以达到100 Hz,而IMU的采样处理能够达到更高水平。以视觉传感器获取图像信息的时间为基准,对最邻近时刻的GPS信号和IMU信号进行数据内插和外推,实现数据的时间对准。同时,以视觉传感器在舰载无人直升机平台上的安装位置为机体坐标系原点,将GPS设备与IMU设备获取的信息经特定的位移与角度变换,转换到统一的机体坐标系下[8]。
在着舰过程中要感知舰船环境,自主避开各种障碍物,构建联通区域。激光雷达和视觉传感器信息融合在一起,既能够提供周围环境的三维几何信息,又能够体现环境的颜色信息,还可以利用视觉传感器垂直视野大的优点来弥补激光雷达扫描线少的缺陷。通过建立激光雷达与视觉传感器多层融合算法框架,对激光雷达与单目视觉和双目立体视觉进行多层融合,可以提供周围环境的更加完善的描述,提高障碍检测的能力[9]。另外,自主着舰系统以先验模型识别出着舰标识后要对着舰标识进行跟踪,目前较为先进的基于视觉的目标跟踪算法融合了检测模块和跟踪模块,两者并行进行,但此类算法得到的目标在图像坐标系中存在一定位置偏差,并且逆透视到无人直升机坐标系时还存在一定标定误差,所以在视觉算法基础上融合激光雷达数据,可以有效提高定位精度[10]。
4.2 基于深度学习的着舰环境感知方法
在无人直升机自主返航后要对着舰环境进行感知,但由于海上环境复杂,直升机和舰艇的姿态处于动态变化之中,环境感知传感器探测到的着舰标志、护栏等环境信息也会随之变化,也有可能会出现环境特征被部分遮挡的情况,因此着舰环境感知比较困难。目前已有的目标识别方法,多数只能根据边缘和几何特征对着舰标志等环境信息进行粗略识别,一旦出现图像角度偏差过大或者部分遮挡的情况,识别准确率大大下降。因此,可以采用深度学习的方法,利用其特征学习能力解决对着舰环境进行准确感知的问题。首先利用大量有标签的训练样本进行目标特征的学习,然后通过无标签样本做测试,从而判断目标识别的效果[11]。该方法的具体流程如图9所示。
4.3 基于SLAM的相对位姿估计方法
SLAM问题本质上是状态估计问题,即通过机器人运动学和传感器信息对机器人位姿和地图特征进行估计。在无人直升机自主着舰过程中,基于GPS信息、惯性测量单元以及直升机搭载的视觉传感器和激光雷达,在对各个传感器数据进行时空配准预处理之后,即可构建位姿估计的状态模型与量测模型,借助非线性滤波方法,实现无人直升机的位姿估计[12]。融合多传感器信息的无人直升机位姿估计算法流程如图10所示。

图 9 目标识别流程图Fig. 9 Target recognition flow chart
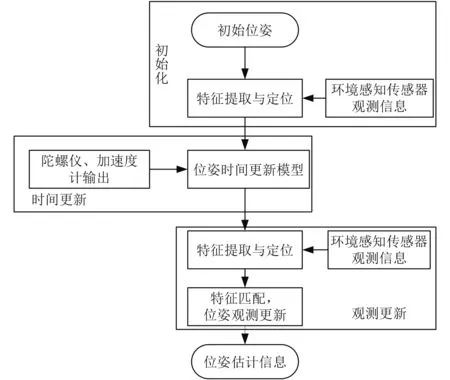
图 10 融合多传感器信息的无人直升机位姿估计算法流程Fig. 10 Estimation algorithm flow of unmanned helicopter with multi-sensor information
基于初始时刻的无人直升机位姿,采用环境感知传感器对环境进行探测,根据环境感知传感器的输出进行环境特征的提取,基于环境感知传感器的设备参数与探测特点,将环境特征描述为相对于导航坐标系的位置信息,然后无人直升机移动到下一采样时刻,根据惯性传感器对无人直升机位姿状态进行时间更新,再次根据环境感知传感器的输出提取环境特征,并与前一时刻的环境特征进行匹配,根据匹配信息得到在一个采样间隔里无人直升机位姿的变化量,以此变化量为观测值,对位姿状态进行量测更新,从而得到准确的位姿状态的估计值,重点解决以下2个方面问题[13]:
1)无人直升机搭载的处理器的处理能力通常有限,且平台的存储能力、通信带宽以及续航能力同样有限,综合考虑无人平台执行具体任务时的各种要求,需要在保证或者调高位姿估计精度的前提下,降低位姿估计的运算量。
2)姿态估计问题属于典型的非线性系统估计问题,为达到更好的估计效果,往往需要融合多个传感器信息,通过高斯假设的矩近似滤波算法如扩展卡尔曼滤波、无迹卡尔曼滤波、容积卡尔曼滤波等进行处理,这些方法实质上均是基于联合高斯分布假设的线性估计器。但随着传感器精度提高以及实际中系统状态的初始不确定性等因素,由于初始误差和/或精确测量条件下联合高斯分布假设的准确性下降,使得后验误差矩阵出现过估计,即滤波器给出的误差远低于实际误差,导致滤波发散。
4.4 基于甲板运动预估的着舰控制方法
由于风浪的影响,无人直升机着舰时要考虑舰艇甲板运动、阵风干扰、舰尾气流和地面效应的影响,因此无人直升机自主着舰第三阶段的控制要比进场阶段困难的多。要实现无人直升机安全地自主着舰,则要求其在保证环境信息感知准确的前提下能够结合自身运动状态完成对飞行轨迹的合理控制。首先根据传感器的量测和甲板运动的主要特性设计甲板运动预估器,然后通过预估器确定最佳的下降时间,并通过控制下降速率使无人直升机以最佳着舰状态着舰,亦即按甲板运动预测的最小状态着舰。这里要解决的难点问题是,普通的甲板运动预估器都是短时间的预估,时间过长会使预估器的误差变大,而无人直升机着舰是相对缓慢的过程,从开始下降到触舰时间较长,因此要改进现有甲板预估器,使之满足着舰条件[14]。另外,设计着舰中止控制系统,当着舰危险因子较高时无人直升机选择复飞。
5 结 语
在无人直升机自主着舰迫切的军事需求背景下,以无人直升机自主着舰为研究对象,针对国内研究的不足,设计一套无人直升机自主着舰方案,分析自主着舰流程,阐述系统组成,研究关键技术。鉴于国内还没有成熟的无人直升机自主着舰方法,本方案的研究具有重要现实意义,为实现无人直升机真正自主着舰提供了方向,为进一步工程实践提供理论和技术支撑。
猜你喜欢
环球时报(2022-09-15)2022-09-15 19:18:27
小猕猴学习画刊(2022年12期)2022-02-06 03:00:42
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
信息安全研究(2015年3期)2015-02-28 20:17:57
海峡姐妹(2015年3期)2015-02-27 15:09:59
太空探索(2014年1期)2014-07-10 13:41:50
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:51