电磁轨道炮反后坐装置研究
2019-03-30 02:53马新科邱群先岳海波
舰船科学技术 2019年3期
马新科,邱群先,何 行,高 博,耿 昊,岳海波
(中国船舶重工集团公司第七一三研究所,河南 郑州 450015)
0 引 言
电磁轨道炮是一种靠电磁力将弹丸加速到超高速度的新概念武器,由于在军事领域具有广阔的应用前景,目前已有多个国家对这一电能武器开展研究[1]。由牛顿第三定律,电磁轨道炮推动弹丸向前运动时,炮身会受到一个反方向的后坐力[2 – 3]。美国ISL研究中心和TEXAS研究中心在试验中也验证了电磁轨道炮存在后坐力[4 – 5]。从美国公开的其位于达尔格伦海军水面作战武器中心进行的32 MJ电磁轨道炮发射试验视频资料中可以看出,在发射过程中,装置存在明显的后坐运动,同样验证了后坐力的存在。
随着研究的进展,电磁轨道炮的发射能级将不断提高,炮口动能越来越大,发射装置的后坐力也将越来越大。如果身管与炮架刚性连接,则将对炮架形成很大的冲击,为保证结构稳定,炮架需要设计的很大[6],这将不利于后续工程化应用。因此,为改善炮架受力,缩小架体结构尺寸,需在身管与炮架间设置起缓冲作用的反后坐装置,使二者间成为弹性连接方式。目前,常规火炮使用的反后坐装置已较为成熟,发展过程中形成了多种结构类型和布局方式的反后坐装置,如某57G火炮采用的是与身管同心的弹簧式复进机和带针式复进节制器的节制杆式制退机,某85J火炮采用的是液体气压式复进机和带沟槽式复进节制器的节制杆式制退机,上述2种火炮的复进机和制退机均分别布置在身管的上下两侧;美国M2A1-105榴弹炮采用了双筒式短节制杆制退复进一体机,2个外筒同样分别布置在身管的上下两侧[7]。相对于常规火炮,电磁轨道炮作为新概念武器具有其自身的特点,如后坐部分质量大、炮口动能大等,发射过程中,尤其是高射角发射时,后坐工况复杂,对反后坐装置结构类型和布局方式具有更高要求,而国内外在此方面的研究较少,因此对电磁轨道炮反后坐装置的研究十分必要。本文基于某轨道炮发射系统实体模型,分别对采用3种类型反后坐装置时的后坐规律进行仿真计算,从而研究反后坐装置结构类型和布局方式对后坐过程的影响。
1 发射系统模型建立
1.1 发射系统模型
发射系统简化实体模型如图1所示,包括身管、反后坐装置连接板、上下导电轨道和馈电装置,这些部件组成轨道炮的后坐部分。

图 1 发射系统简化实体模型Fig. 1 Simplified entity model of launch system
1.2 动力学模型
取后坐部分为研究对象,对射击时后坐部分进行受力分析。分析受力时,忽略弹丸对内膛的摩擦力,并假设所有的力均作用在射面内,且后坐部分为刚体[8 – 9]。射击时后坐部分受力情况如图2所示。后坐过程中,反后坐装置为后坐部分提供制动力直至装置停止后坐。

图 2 后坐部分受力示意图Fig. 2 Schematic diagram of recoil force
以炮膛轴线为x轴,轨道炮模型的动力学方程为:

2 3 种类型反后坐装置及反后坐效能分析
对于有后坐运动的发射器,其后坐规律取决于自身结构和所使用的反后坐装置,在自身结构确定的情况下,不同类型的反后坐装置和布局方式,会对后坐规律产生不同的影响。结合3种不同类型的反后坐装置,对电磁轨道炮的后坐规律进行仿真,并进一步分析3种类型反后坐装置的反后坐效能。
2.1 3种类型反后坐装置
2.1.1 反后坐装置布局图
结合图1所示的某轨道炮的简化实体模型,3种类型的反后坐装置布局图如图3所示。图3(a)所示的类型1反后坐装置(简称类型1)由1套复进机和1套驻退机组成,二者对称布置在身管的上下两侧;图3(b)所示的类型2反后坐装置(简称类型2),由2套与类型一具有相同结构尺寸的复进机和驻退机组成,两复进机对称布置在身管的上下两侧,两驻退机对称布置在身管的左右两侧;图3(c)所示的类型3反后坐装置(简称类型3),由4套相同的单筒式驻退复进机组成,均匀布置在身管的四周。

图 3 三种类型反后坐装置布局图Fig. 3 Layout of three types of recoil device
2.1.2 3 种类型反后坐装置结构方案
1)复进机结构方案
类型1和类型2的复进机为气压式复进机,结构方案如图4所示。其中复进杆端部与后坐部分相连,外筒与炮架相连,储气腔内气压可调,活塞的工作面积为0.013 m2,储气腔初容积为 0.018 m3,其工作原理是:后坐过程中,轨道炮后坐部分拉动复进杆使其与外筒产生相对运动,进而压缩储气腔中的气体储存复进能量。
2)驻退机结构方案

图 4 气压式复进机结构方案简图Fig. 4 Schematic diagram of the structure of recuperating machine
类型1和类型2的驻退机为带针式复进节制器的节制杆式驻退机,结构方案如图5所示。驻退杆端部与后坐部分相连,外筒与炮架相连,其工作原理是:后坐过程中,后坐部分带动驻退杆与节制杆产生相对运动,节制杆与节制环间形成变截面流液孔,液体流过该流液孔时形成液压阻力,复进过程中,液体流过针式复进节制器上的变截面沟槽形成液压阻力。
图 5 驻退机结构方案简图Fig. 5 Schematic diagram of the structure of recoil brak
3)驻退复进机结构方案
类型3的驻退复进机为带复进缓冲弹簧的驻退复进一体机,结构方案如图6所示。其中大活塞杆端部与后坐部分相连,外筒与炮架相连,储气腔内气压可调,活塞的工作面积为0.01 m2,储气腔初容积为0.002 m3,其工作原理是:后坐过程中,后坐部分带动大活塞杆与外筒产生相对运动,通过储油腔中的油液将压力传递到浮动活塞,使其压缩储气腔气体储存复进能量,同时液体流过节制杆与节制环之间的变截面流液孔形成液压阻力,复进过程中,浮动活塞通过油液将复进力传递给大活塞杆,使大活塞杆与外筒产生相对运动,通过复进缓冲弹簧进行缓冲。

图 6 驻退复进机结构方案简图Fig. 6 Schematic diagram of the structure of recoil and recuperating integrated machine
2.2 后坐复进过程仿真
对后坐复进过程的仿真计算就是对式(1)的求解计算,在VC环境下编制计算程序,时间步长设置为0.1ms,在相同的发射工况下,对某轨道炮分别使用3种类型反后坐装置时的后坐复进过程进行仿真计算。
2.2.1 输入条件设定
发射工况如表1所示。

表 1 发射工况Tab. 1 Launch condition
计算过程中,由于3种类型反后坐装置的储气腔数量不同,因此需设置不同的气压初值,所设置的气压初值为保证轨道炮在射角范围内均能够复进到位的最小值。储气腔气压初值如表2所示。

表 2 储气腔气压初值Tab. 2 Initial pressure value of gas storage chamber
发射时,电源装置传输到导电轨道上的电流值是电磁轨道炮的重要输入参数,通过电流值可计算出同一时刻弹丸推力值,仿真计算所采用的电流曲线和计算出的弹丸推力曲线如图7所示。

图 7 电流曲线和推力曲线Fig. 7 Current curve and thrust curve
2.2.2 仿真计算结果
在相同计算模型下,分别对0°射角和45°射角工况下的后坐规律进行仿真计算,得出采用3种类型反后坐装置时的后坐运动规律曲线。
1)后坐力曲线
0°和45°射角工况下的后坐力曲线如图8所示。
2)后坐复进位移曲线
0°和45°射角工况下的后坐复进位移曲线如图9所示。
3)后坐复进速度曲线
0°和45°射角工况下的后坐复进速度曲线如图10所示。
4)后坐过程中储气腔气压曲线
0°和45°射角工况下的储气腔气压曲线如图11所示。
仿真计算结果如表3所示。
图 8 后坐力随时间变化曲线Fig. 8 Recoil-time curve
图 9 后坐复进位移随时间变化曲线Fig. 9 Stroke-time curve

图 10 后坐复进速度随时间变化曲线Fig. 10 Velocity-time curve
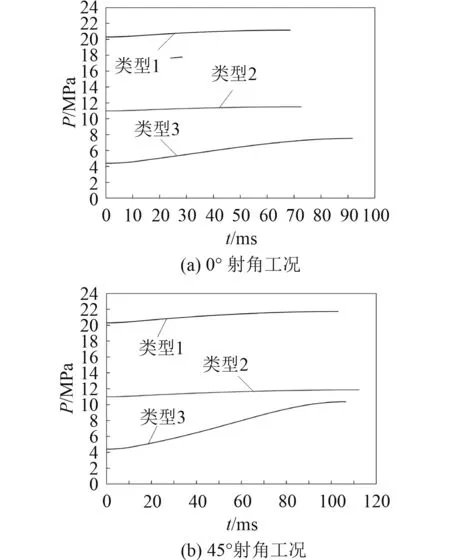
图 11 气压随时间变化曲线Fig. 11 Pressure-time curve
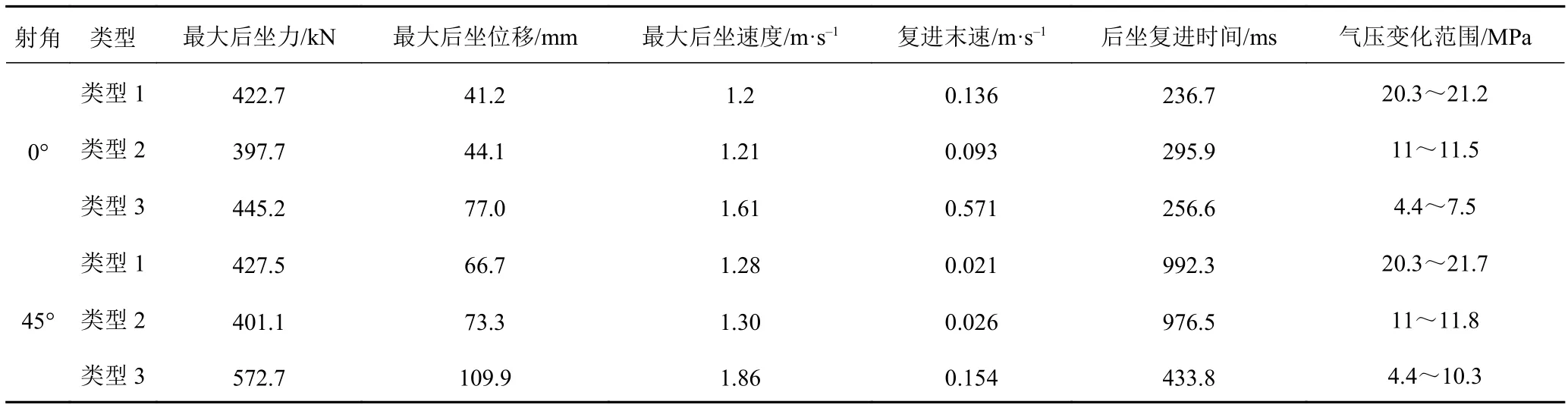
表 3 后坐复进规律仿真计算结果Tab. 3 Simulation results of recoil rule
2.2.3 反后坐效能分析
从后坐复进运动规律曲线和表3计算结果可以看出,在0°和45°射角工况下:
1)对于后坐力变化规律,类型1和类型2相对于类型3后坐力变化趋缓,类型2的最大后坐力最小,类型3最大后坐力最大,最大后坐力越小越有利于发射装置架体的受力状态;
2)对于位移变化规律,类型3后坐复进位移变化更为急剧,3种类型的最大后坐位移依次增大,最大后坐位移均未超过110 mm,而常规大口径火炮往往有数百毫米以上的后坐位移,可见电磁轨道炮的后坐位移较小,这与电磁轨道炮具有较大的后坐部分质量有关;
3)对于速度变化规律,3种类型的最大后坐速度依次增大,类型3的复进末速最大,类型2的复进末速最小,复进末速越小,后坐部分复进终了时的动能越小,对炮架的冲击越小;
4)储气腔气压初值设置与储气腔数量有关,因此类型1气压初值设置的最高,类型3设置的最低,而气压值越高,越不利于反后坐装置气体密封性能。
5)3种类型反后坐装置对后坐部分的受力和身管的扰动具有不同的影响,由于复进机力和驻退机力在后坐过程中不同步,因此类型1反后坐装置的1套复进机和1套驻退机布局,会导致后坐部分受到偏转力矩作用,并造成身管的扰动,而类型2和类型3反后坐装置的布局方式能够使后坐部分受力更均匀,避免产生偏转力矩作用。
3 结 语
结合前述仿真计算结果和分析可以得出结论,由于高射角时气压初值设置过高不利于密封,以及复进机力和驻退机力不对称导致后坐部分承受偏转力矩,类型1反后坐装置的结构类型和布局方式不能适用于具有后坐部分质量大、炮口动能高等特点的电磁轨道炮;类型3反后坐装置的结构类型和布局方式虽然能够改善后坐部分受力,并且具有较小的气压值利于密封,但是最大后坐力较大,并且复进末速较高,二者都对炮架带来更大冲击;而类型2反后坐装置结构类型和布局方式能够使最大后坐力和复进末速控制在最小,气压值虽然比类型3高,但是是在可行范围内。综上所述,类型2反后坐装置结构类型和布局方式在反后坐综合效能上具有更大的优势,更适合于电磁轨道炮。
本文进行仿真计算时,由于反后坐装置结构原因,对于不同的射角,气压初值取值相同(由于电磁轨道炮后坐部分质量较大,低射角和高射角工况所需的气压初值往往差别较大),这将不利于反后坐装置在低射角工况下的反后坐效能,在进一步的研究中,可考虑能够随射角自动调整气压的反后坐装置的设计。
猜你喜欢
装备环境工程(2022年7期)2022-08-10
装备环境工程(2022年7期)2022-08-10
燕山大学学报(2022年4期)2022-08-01
煤气与热力(2022年4期)2022-05-23
现代仪器与医疗(2021年1期)2021-06-09
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
火力与指挥控制(2020年11期)2020-12-26
兵器装备工程学报(2020年4期)2020-05-18
北京汽车(2020年1期)2020-05-07