粒子群蛙跳模糊神经网络的PMSM转速控制器设计
2019-03-29 03:15乔维德
微特电机 2019年3期
乔维德
(无锡开放大学,无锡 214011)
0 引 言
永磁同步电动机(以下简称PMSM)使用高能永磁体代替电励磁,无励磁线圈及电刷,体积小,损耗低,运行效率高,可靠性强,适应外界环境及抗干扰能力强,它的技术性能明显优于永磁无刷直流电动机、感应电动机等,在电气传动系统以及数控机床、工业机器人等小功率应用场合已获普遍应用。但因PMSM系统具有高阶、参数时变、多变量、严重非线性及强耦合性等特点,很难用精确数学模型描述其动态运行过程,且易受负载干扰等不利因素影响,致使抗干扰性能减弱,对PMSM系统控制性能带来极大影响。PMSM调速系统一般采用PI控制方法,尽管PI控制算法简单,且能满足并实现相应的控制需求,但是PI控制毕竟是一种线性控制方法,应用于PMSM这类严重非线性系统时,要实现较高精度和快速响应的控制要求还存在一定的困难。目前,有关学者和专家提出PI控制与人工智能相融合的设计方案,设计模糊PI、神经网络PI等相应的复合控制技术方案,基本实现了非线性系统一定的控制要求。模糊控制具有较好的鲁棒性,但控制精度不高;神经网络具备较强的容错及自学习能力,但其学习过程明显变慢、延缓。因此,本文综合考虑模糊逻辑和神经网络各自的长处和不足,融合模糊逻辑、神经网络以及PI控制技术和方法,设计一种递归模糊神经网络PI控制器,以该控制器替代PMSM系统中的速度调节器功能,采用一种新型的粒子群蛙跳算法来调整和优化控制器结构参数。经计算机仿真与现场试验分析,应用该复合控制策略,PMSM系统响应快、无超调,控制精度高,鲁棒性及其抗干扰能力强,能精准实现PMSM系统的转速控制。
1 PMSM控制原理
PMSM控制系统的结构原理如图1所示。它的主要功能部件包括电流内环和速度外环,其中,电流内环中的电流调节器仍按常规PI控制规律设计,而速度外环则由原来的常规PI调节器重新设计成一种RFNN PI控制器,换言之,即PMSM系统速度外环中由RFNN控制器和常规PI调节器复合构成速度控制器。在不同运行条件下,该速度控制器具有在常规PI控制器和RFNN控制器两者之间自行切换的功能。PI控制器中的比例、积分系数的取值遵照常规整定法设计(本文略),一旦PMSM控制系统的速度给定值出现瞬时变化,比如外界干扰引起系统结构参数变化而使系统产生振荡现象(即∑|ei|=|∑ei|),或者系统出现超调(即e=0,而de/dt≠0)等异常情况时,开关S会立即自行转换至RFNN控制器的控制运行状态。开关S的自动切换任务由智能协调器负责协调完成,智能协调器中主要保存两种不同控制器分别运行的不同误差域,以及它们切换运行条件的相关模糊规则等。
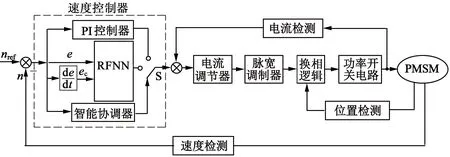
图1PMSM控制系统结构原理
2 RFNN控制器设计
根据PMSM系统控制要求,速度控制器的设计应用常规PI和RFNN复合控制策略。考虑普通模糊逻辑与静态前馈神经网络均无法呈现动态映射过程及辨识动态特性,本文引入一种RFNN,其核心就是设计一种递归环节,并将其应用于普通模糊神经网络的模糊化层,通过该递归环节中神经元的功能作用,及时动态地反馈相关信息并加以保存。所以,RFNN由现在输入值、以往输入值和以往输出值的共同作用来决定RFNN的输出值,形成有效覆盖RFNN网络局部以及全局的递归单元结构,较好地克服和避免PMSM系统在运行过程中频繁出现的严重非线性映射等瓶颈问题。RFNN含输入层、模糊化层、模糊规则层、输出层共4个功能组成部分[1],如图2所示。
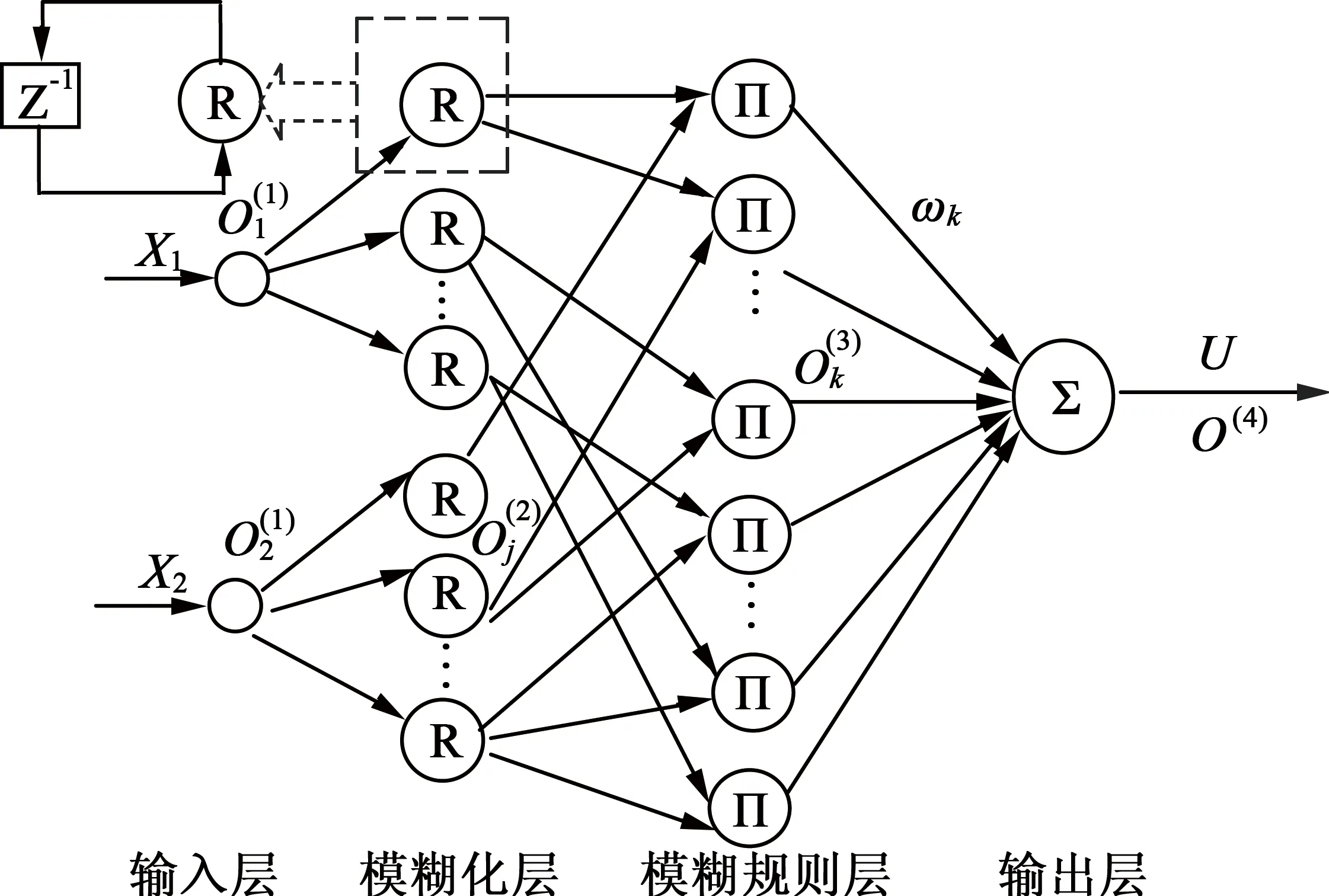
图2RFNN控制器结构图
RFNN输入层的输入量X1,X2需要换算成-1至1之间范围的取值。输入层中的节点输出值:
(1)
式中:i=1,2。x1=e,x2=ec。
RFNN模糊化层的输入变量源自输入层的输出,按要求对其作模糊化运算处理。各输入变量的模糊语言变量表示为FB(负大),FS(负小),ZE(零),PS(正小),PB(正大)。按公式推算各输入模糊变量的隶属函数,这里隶属函数选取为典型的高斯基函数。本层有2×5个输出节点,各节点输出规则如下式:
(2)

考虑本文的RFNN模糊化层的10个输入节点中,都设计了相同功能的递归环节结构,于是模糊化层各节点的输入:
i=1,2;j=1,…,5(3)
在RFNN的模糊规则层结构中,主要实现各模糊语言变量“与”运算操作功能。该层输入和输出分别按下式计算:
(4)
式中:k1=k2=1,2,…,5;k=k1k2=1,2,…,25。
RFNN的输出层为网络的最后环节,因为该层输入为上层模糊规则层经运算后的输出值,为此将该层所有输入量进行去模糊化操作和数据归一化处理。该层的输入量与输出值按下式计算:
(5)
式中:ωk是模糊规则层和输出层之间的连接权值。
在以上设计的RFNN中,参数aij,bij,rij,ωk均需要通过反复调整和连续优化方能取得满意的RFNN结构。
3 粒子群蛙跳算法优化RFNN控制器参数
RFNN结构中的aij,bij,rij,ωjk,ωk等参数对系统控制性能存在很大影响,假如仍然以传统的BP算法学习训练并优化这些参数,往往出现低速收敛、易陷入局部最小值等瓶颈问题。本文将粒子群算法(以下简称PSO)和混合蛙跳算法(以下简称SFLA)两者融合为一种粒子群蛙跳算法(以下简称PSO-SFLA),对RFNN进行训练和在线学习,可以克服传统BP算法的不足,增强神经网络的泛化能力,加快网络的全局收敛。对于PMSM转速控制系统,速度调节器由本文设计的RFNN控制器取代,RFNN控制器的输入变量分别设定为系统的给定转速nref与电机实际检测转速n间的转速误差e,以及e的转速误差变化率ec。通过PSO-SFLA对RFNN的学习训练,实时调整并在线优化aij,bij,rij,ωjk,ωk等结构参数,以增强RFNN转速控制器的控制能力。
3.1 PSO
PSO源自对鸟群捕食行为的一种模拟与研究。假设每个待优化问题的解均相当于搜索空间中的一只鸟,命名为“粒子”,在搜索范围空间中每个粒子所处的位置代表一个潜在的解。在一个D维搜寻空间范围内,由N个粒子共同形成一个“粒子”群体,处于D维搜寻空间第i个粒子位置假定为Xi=(xi1,xi2,…,xiD)( 其中i=1,2, …,N),第i个粒子的速度设定为Vi=(vi1,vi2,…,viD);搜出的第i个粒子的最好位置设定为Pi=(Pi1,Pi2,…,PiD),群体中所有粒子搜寻到的最优位置设定为Pg=(Pg1,Pg2,…,PgD)。每个粒子通过跟踪Pi,Pg及时更新当前速度及位置。即:
(6)

对于标准PSO算法,ω增大时粒子全局搜索能力增强;ω减小时,粒子局部搜索能力减弱;而ω=0时粒子便失去记忆且容易出现“早熟”,粒子后期也极易在全局最优解附近产生振荡现象。这里的惯性权重ω的设计能自适应跟踪粒子的适配值[2],即:
(7)
式中:f为粒子适配值;fave为每代粒子平均适配值;fmax为最大适配值。
3.2 SFLA
SFLA由Eusuff等学者在2003年首次提出,该算法属于模仿青蛙群体搜索食物过程的一种智能优化策略。在SFLA中,首先设置一个待搜索的D维目标空间范围,在此空间由T只青蛙共同构成初始种群,每只青蛙代表一个问题解,其中第i只青蛙所对应求解问题的解设定成Xi=(Xi1,Xi2,Xi3,…,XiD)(其中i=1,2,…,T)。然后全部青蛙按照各个体适应度从低到高按次序排列,且均等划分成m个族群,每个族群又分别拥有n只数量青蛙,即T=m×n。对于每个族群,Xb代表族群中的适应度最优解,Xw表示族群中的适应度最差解,Xg表示所有m个族群中的适应度最好解。SFLA在不断进化寻优进程中,需要对m个族群范围中各族群的适应度最差解(青蛙)Xw按下式进行更新计算:
(8)
式中:R表示[0,1]区间上的随机数;Dj表示在第j维上移动距离;Dmax为青蛙一次更新位置的最大值。徜若原来解Xw适应度比Xw(new)的适应度好,那么式中Xb值就由整个蛙群最优个体Xg替换,然后按式(8)执行更新操作。假设通过更新计算后的Xw(new)适应度仍然没有变优,那么就随机产生一个新解(青蛙)来替代原来的解Xw(即最差青蛙)。此操作不断重复更新,直至达到规定的迭代次数后停止。
3.3 PSO-SFLA及其实现
粒子群算法寻优过程容易陷入局部最优,SFLA也存在着收敛速度慢和易陷入局部最优等问题。为发挥以上两种算法各自的优点并弥补它们的缺陷,这里采取PSO算法和SFLA融合而成PSO-SFLA的寻优策略。首先,将所有粒子划分成Tnum组数量相等的子群,每个子群依据PSO算法的运行流程和模式不断进化。然后,从各子群中选出最好粒子共同构成新群体,按照SFLA算法流程模式进化,直至搜寻出最好粒子。因为SFLA的进化过程,更新各子群最好粒子位置,丰富各子群多样性;同时SFLA算法也能通过精细搜寻得到更好的潜在解。SFLA算法子群中的最好位置反馈至粒子群的速度更新公式,从而有效克服粒子群算法陷入局部最优的不足。PSO-SFLA速度和位置更新公式如下[3]:
(9)
式中:λ1和λ2为影响因子,主要是避免速度过大,并且降低对最优粒子产生的影响,从而保持粒子多样性,防止陷入局部最优。PSO-SFLA流程如图3所示。
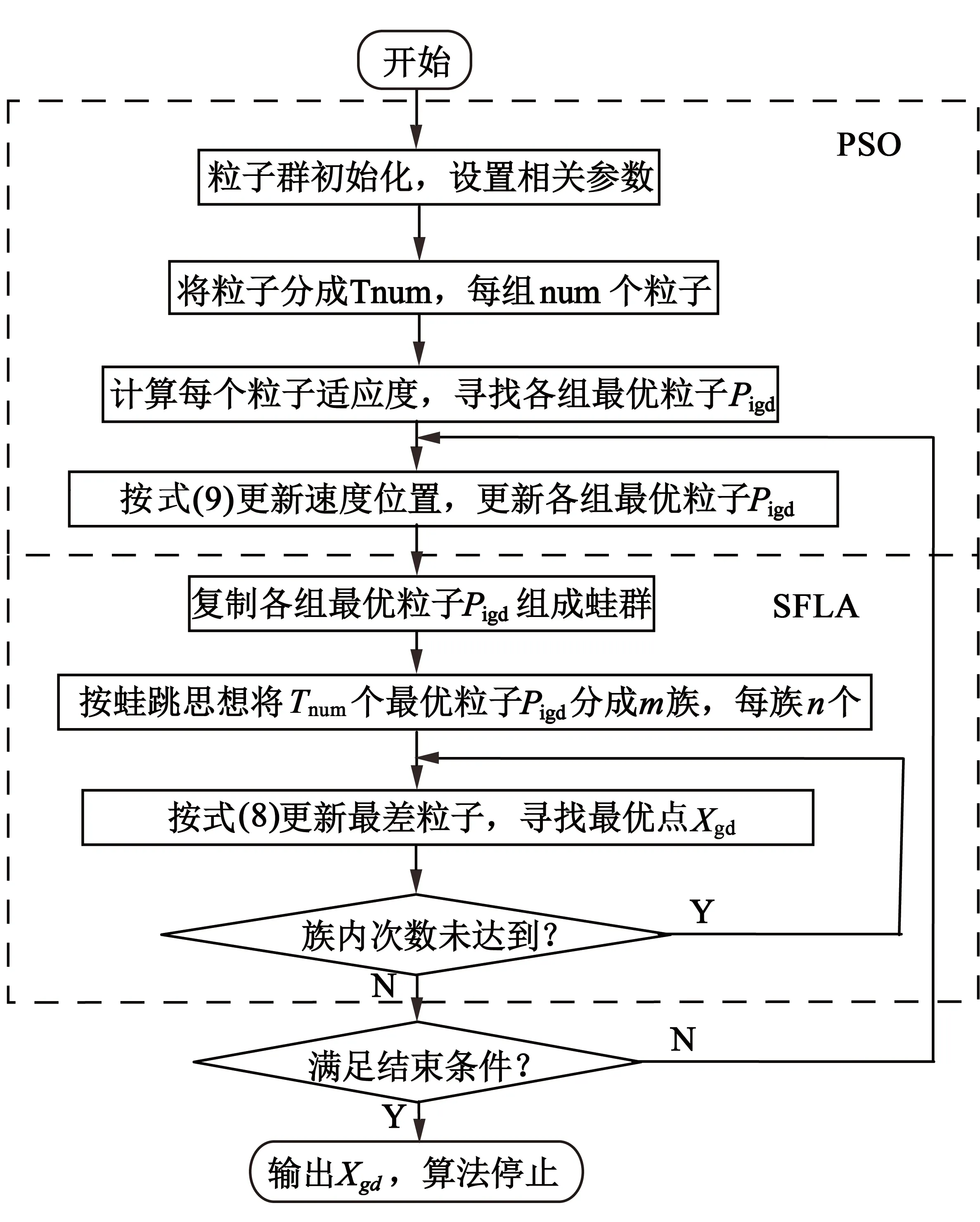
图3PSO-SFLA流程
3.4 RFNN参数转化为粒子群蛙跳算法参数
设计RFNN控制器的关键步骤是确定其结构参数。本文将RFNN结构中aij,bij,rij,ωjk,ωk等参数都放置在一个多维空间向量中,每个参数类似于PSO-SFLA中的青蛙。在初始化种群时,首先随机产生n只青蛙。每只青蛙个体便形成一个RFNN,选取并输入相关样本数据对每个RFNN进行训练和参数寻优。每个RFNN在训练集上的均方误差(目标函数)MSE设定:
(10)
式中:n为选取样本数;Yk,p为训练样本p在第k个输出节点的实际输出;Qk,p为对应的期望输出。设定PSO-SFLA的适应度函数为F=1/(MSE+1),以此来评价每个青蛙个体的适应度,最终搜索出最佳个体。如果均方误差MSE位于系统给定的最小误差范围内,或者PSO-SFLA算法的进化次数超过最大进化次数时,PSO-SFLA便中止结束[3]。所以,当RFNN结构参数aij,bij,rij,ωjk,ωk以及均方误差MSE、适应度函数F确定后,便可以通过PSO-SFLA进行优化处理。
4 仿真与实验验证
4.1 仿真分析
搭建PMSM控制系统的仿真模型。选取的PMSM仿真参数:额定功率500W,额定转速ne=1 500 r/min,定子相电阻Rs=4.475 Ω,定子相绕组自感L=0.025H,互感M=-0.0075H,转动惯量J=0.001 87 kg·m2。粒子群蛙跳算法参数设置:种群大小为20,加速因子C1=C2=C3=2,影响因子λ1=0.5,λ2=0.25,ωmax=1.2,ωmin=0.1;全局最大迭代次数为500次,变量维数30,青蛙总数为200只,平均分为20个子群,子群体内迭代次数为10。传统PI控制器和RFNN控制器各自用作PMSM控制系统的速度控制器。控制系统中电流调节器仍采用PI调节器(Kp=3 ,Ki=37)。在给定转速nref=1 500 r/min条件下系统运行,且当t=0.6 s时突增10 N·m负载,转速变化曲线如图4所示。曲线①代表传统PI控制器作用时的速度曲线,曲线②为RFNN控制器时速度曲线,曲线②在响应速度、超调量及抗干扰能力等方面均优于曲线①,表明经PSO-SFLA优化的RFNN控制器可以得到更优指标和更好控制成效。
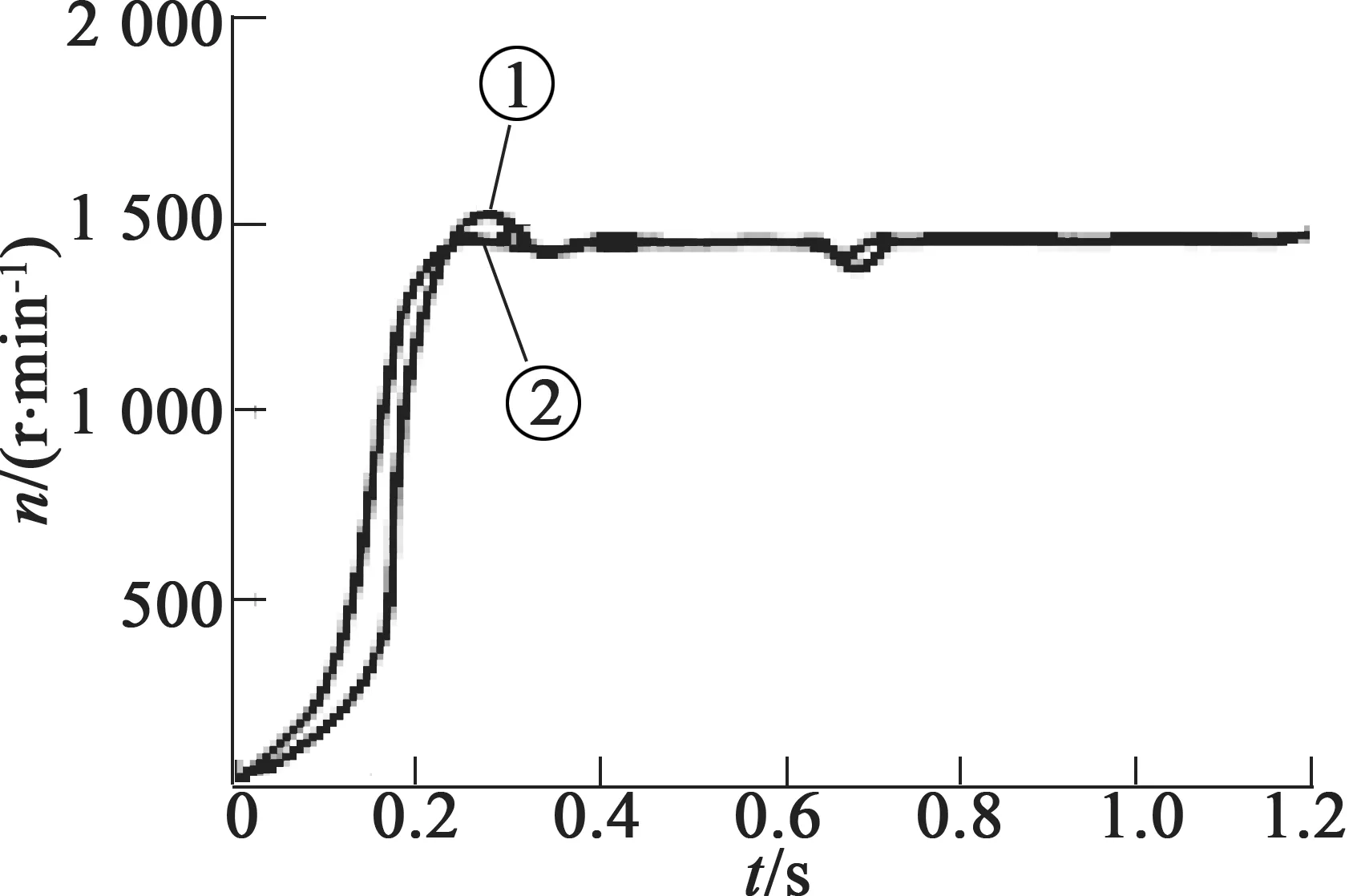
图4PI和RFNN控制器速度曲线
4.2 实验结果
为进一步验证PSO-SFLA优化RFNN控制器的控制性能,建立PMSM控制实验装置并进行验证分析。实验中DSP芯片选取TMS320F28035,系统数据采集、信号处理与控制等功能均由该DSP芯片处理完成。系统控制的外围电路主要包括功率驱动器、逆变器电路、电流采样与检测电路、示波器、PC上位机、CAN通信线路等。系统的给定速度为1 500 r/min,且在0.7 s时突加10 N·m负载。图5为转速响应曲线,图6为转矩响应曲线。由图5可见,电机在稳态运行时的转速约为1 448 r/min,转速误差非常小;突加负载干扰时转速波动影响不大。图6的转矩输出变化较为平坦,即使外界负载突然出现变化,电机输出转矩变化波动较为平缓,出现的超调量也很小。通过实验分析,经PSO-SFLA优化的RFNN控制器响应速度快、稳态精度高、抗扰动能力强,具有较强的鲁棒性。
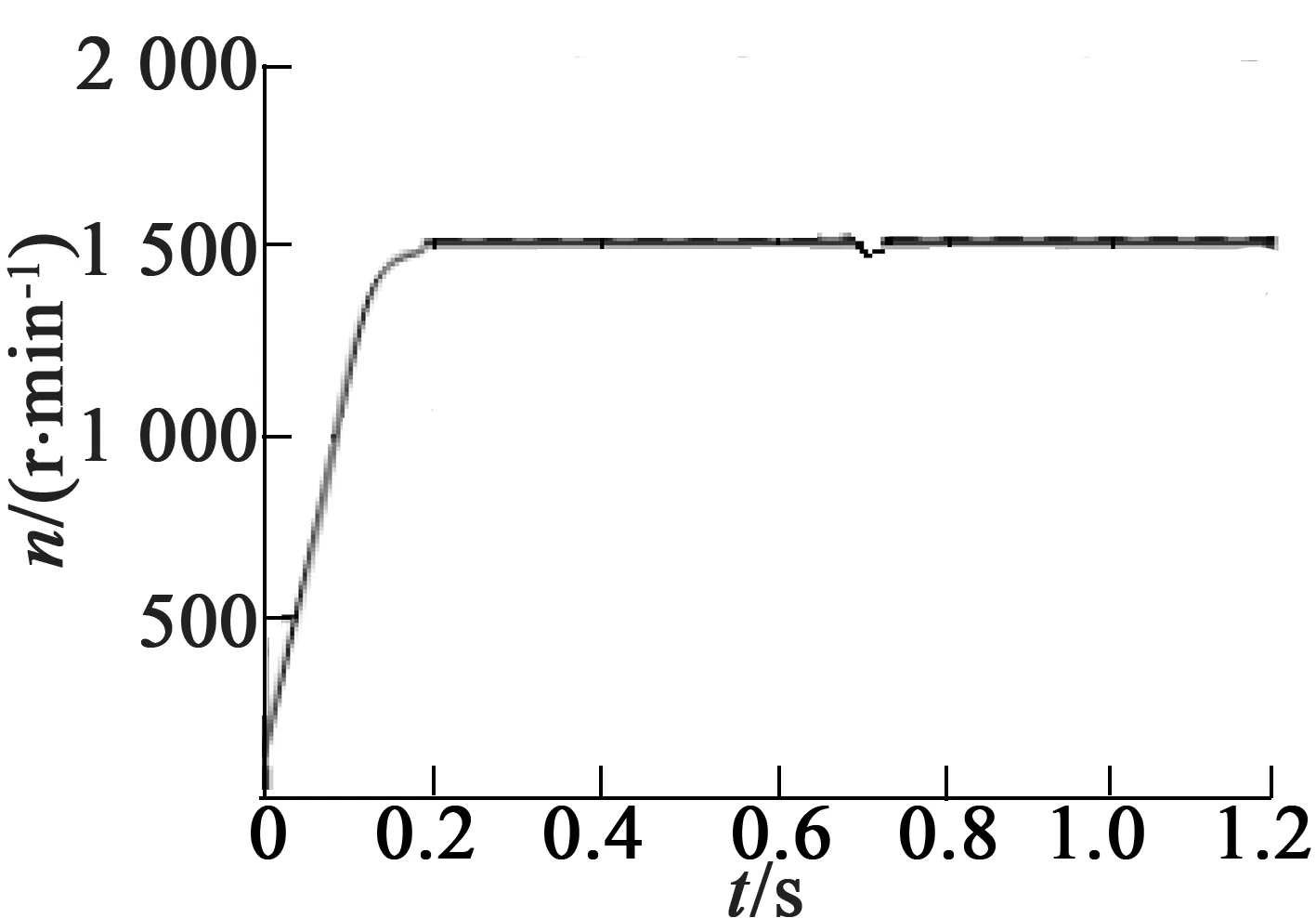
图5基于RFNN控制器的
转速响应曲线
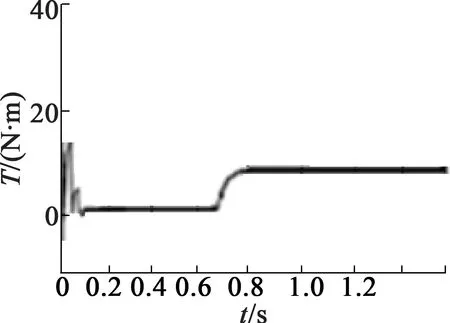
图6转矩响应曲线
5 结 语
本文设计了一种RFNN PI控制器,作为PMSM控制系统的速度控制器,且以PSO-SFLA在线优化RFNN的结构参数,增强PMSM调速系统动态品质。通过仿真分析与实验验证得出,RFNN PI控制器的优化效果良好,在工程应用中具有一定的借鉴应用与推广意义。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
厦门大学学报(自然科学版)(2022年4期)2022-07-15
体育教学(2022年4期)2022-05-05
现代装饰(2020年7期)2020-07-27
汽车实用技术(2018年5期)2018-03-20
当代旅游(2016年10期)2017-04-17
商(2016年28期)2016-10-27
娃娃画报(2016年5期)2016-08-03
财经理论与实践(2015年2期)2015-04-16