基于线阵CCD的带钢对中纠偏检测装置设计
2019-03-28 05:34:04车海军马鲁飞周红星杨景明
仪表技术与传感器 2019年2期
车海军,马鲁飞,周红星,杨景明,李 良
(1.燕山大学工业计算机控制工程河北省重点实验室,河北秦皇岛 066004;2.浙江富日材料科技有限公司,浙江杭州 310000)
0 引言
纠偏检测装置在工业生产中应用广泛,大致分为以造纸、轻纺为主的轻型工业应用,以带钢生产为主的重型工业应用[1]。纠偏检测装置按纠偏位置可分为纠边检测(EPC)与对中检测(CPC);按检测方式分为光电纠偏检测,超声波纠偏检测,电磁纠偏检测。由于超声波对带钢穿透力强,会导致超声波纠偏检测装置产生很大的误差;同时带钢轧制过程中产生电离辐射会导致电磁纠偏检测装置不能正常工作,因此光电纠偏检测装置得到广泛应用。但在现场应用中,红外光敏[2]对中检测装置精度低,导致带钢宽度小于400 mm时与近距离测量时设备不能正常工作。基于线阵CCD[3]的纠偏检测装置可根据使用要求,既可以实现纠边检测和对中检测,又可以满足带钢在不同带宽与距离条件下偏移距离的测量,通过实验验证,该装置性能明显优于红外光敏对中检测装置。
1 对中纠偏检测装置设计
本文设计的纠偏装置可根据用户需求:按图1方式安装实现对中功能[4-5],单个装置可实现纠边功能。
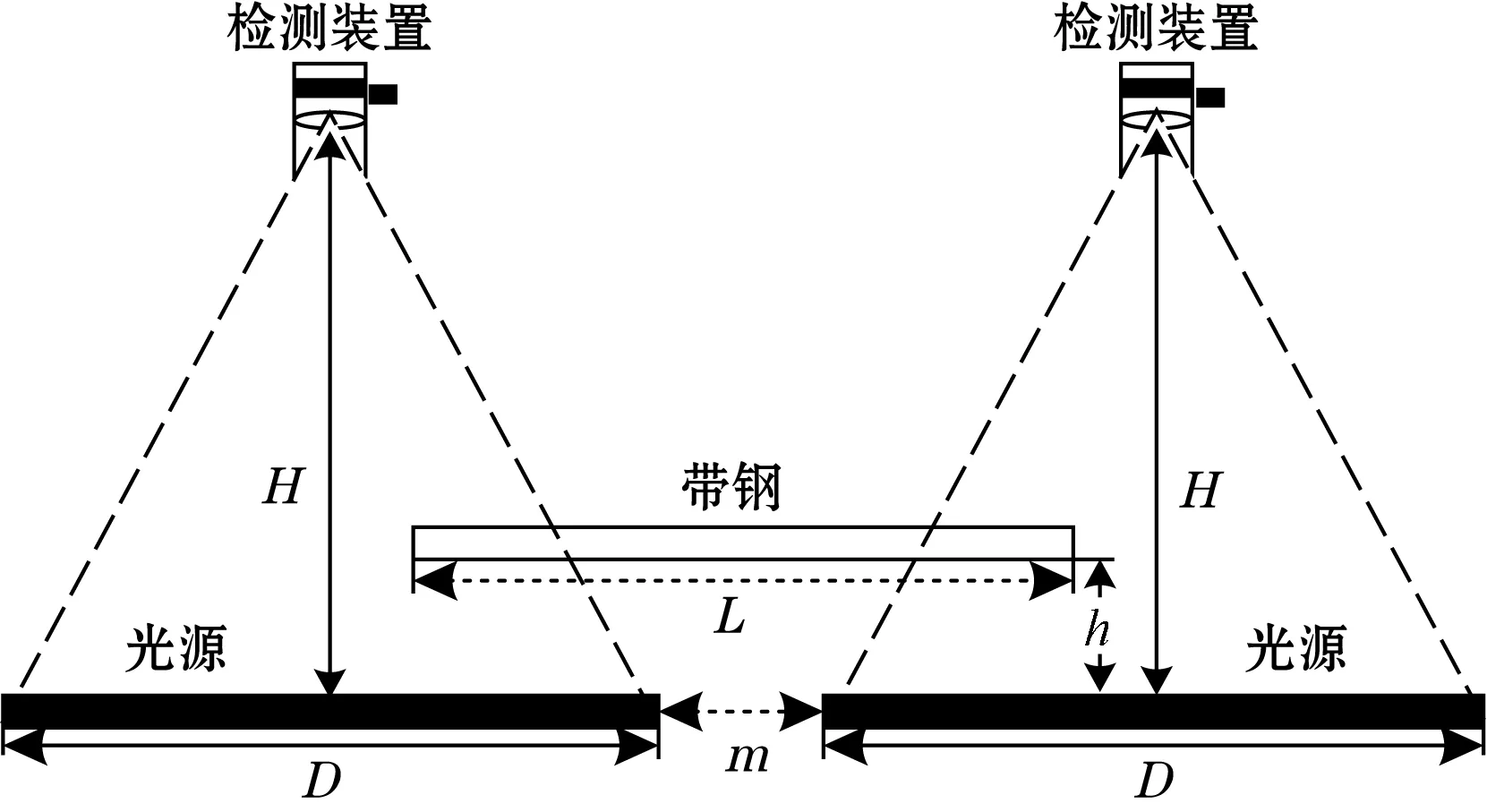
图1 对中原理
检测装置安装在单个光源的中心线上,各安装参数可根据现场要求进行调节,然后转动光检测部分的焦距调节旋钮,满足不同高度下接收的光照强度一致,检测装置输出信号的大小与带钢遮挡光源面积的大小成反比。
2 纠偏检测装置硬件设计
纠偏检测装置由检测部分、光源部分、电源部分组成:红外LED点阵提供光源,其驱动信号由ATmega8产生的PWM提供;检测部分用来接收和处理视频信号,选用ATmega16单片机为此部分的主控器,检测结果以模拟量与数字量两种形式输出,同时为方便现场安装调试与装置的故障检测,设计时用彩色LED实时显示检测信号;为减小高频噪声对装置的影响,设计时注意电源隔离,用来提高系统的稳定性,系统整体设计如图2所示。
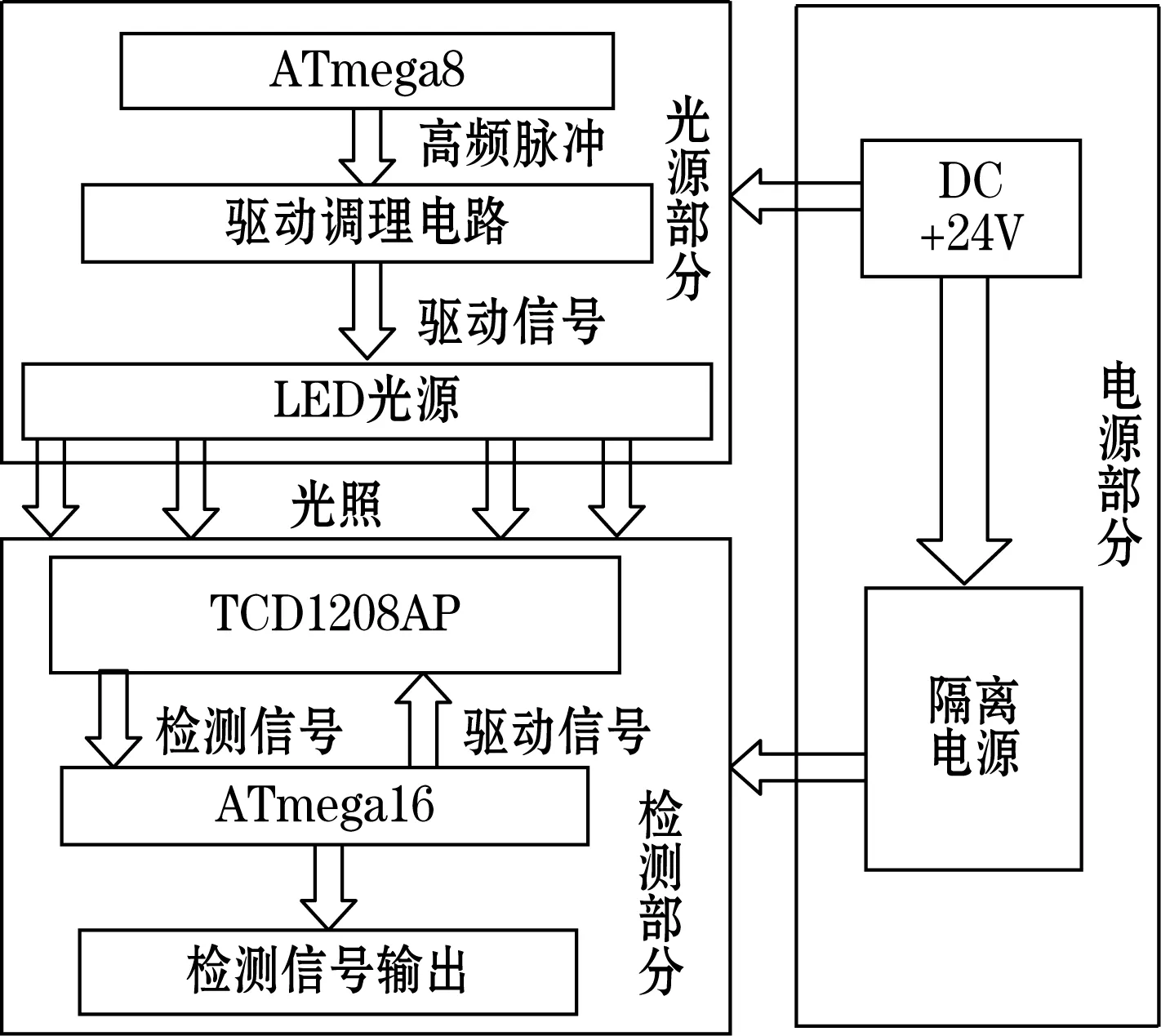
图2 系统整体设计
2.1 检测部分设计
检测部分在设计时分为光学单元与信号处理单元两部分。光学单元如图3所示将带钢成像在CCD接收面上[6-7],为使纠偏装置测量不同宽度的带钢,同时充分考虑镜头的焦距、光圈、景深及经济条件,选用焦距50 mm,光圈F8~F16,可以无限对焦的光学镜头,装置的焦距调节旋钮保证带钢物象的景深在设计范围内是清晰的,从而使CCD接收到稳定的光信号。

图3 光学单元设计
CCD选用线性图像传感器TCD1208AP,器件包含2 160个像素单元,敏感度高,暗电流低,极大地减小了噪声的影响和提高了纠偏检测装置的分辨率。此装置应用恒定频率红外光作为系统光源,因此在CCD前安装透光性较好的红外滤光片,使CCD只能接收到红外光,有效地减小了杂光的干扰。
信号处理单元设计如图4所示。由于轧制环境恶劣,干扰因素较多,因此信号处理单元设计时,选取8位AVR系列单片机ATmega16作为纠偏检测装置的核心控制器:该芯片为先进RISC结构,速度快,数据的吞吐率最高可到16MISP,可编程Flash容量为16 K;端口输出电压为+5 V,可直接驱动部分外围器件,本装置设计特色是很好的利用了控制器内置外设,应用模拟比较器做阈值比较,减少器件的同时可使纠偏装置对检测信号进行实时的处理;CCD属于精密光学器件,工作时对其驱动信号有严格的时序要求,因此通过软件编程,产生精确的脉冲驱动信号。设计时在驱动信号与CCD之间加一片SN74HC14,大大提高了脉冲信号的驱动能力,同时该芯片具有施密特触发器电路,有效的把脉冲驱动信号边沿整形为陡峭的直角,同时施密特触发器的回差电压电路提高了抗干扰能力,保证CCD输入的脉冲驱动信号为稳定的矩形脉冲。
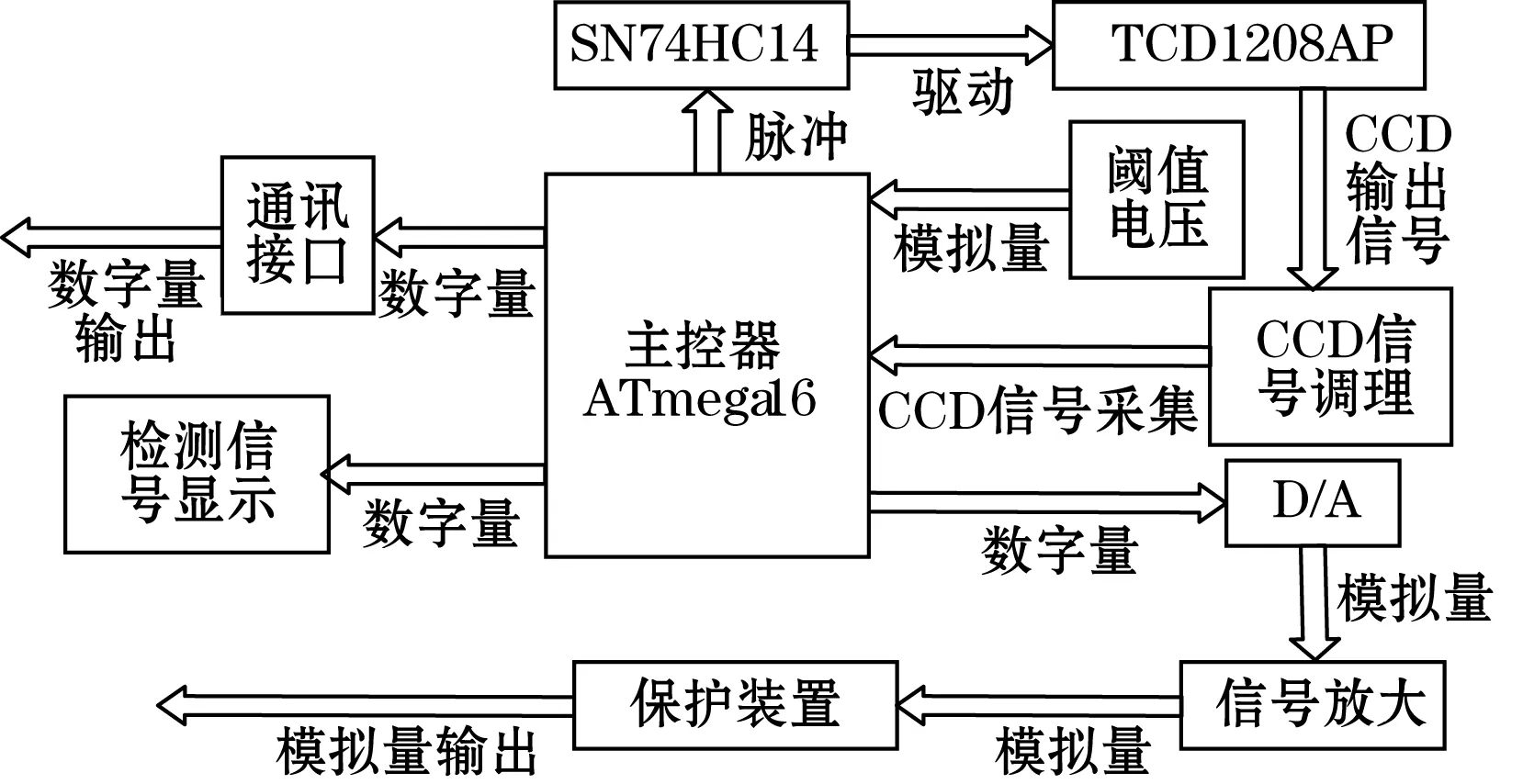
图4 信号处理单元设计
为方便安装调试与装置的故障检测,装置采用移位寄存器配合8支彩色LED,用LED点亮的数量来表示信号的强弱:当没有信号时,8支彩色LED均灭,强度越大,点亮的支数越多直至8支彩色LED交替闪亮;用单片机可直接驱动8支LED,但随着工作时间的增加,灌电流会导致单片机发热,影响控制器的性能及寿命,因此运用移位寄存器有效的解决了上述问题。为方便工业应用,纠偏检测装置输出的信号分为数字量和模拟量两种,分别配有RS-485通讯接口与模拟电压输出接口,同时为提高模拟输出信号的驱动能力,将模拟输出信号放大,接口处模拟量输出为0~+10 V;为防止工业现场的瞬间高压对纠偏检测装置的损坏,装置设计时选用SN65LBC184数字通讯芯片,既节省了传统应用的光耦隔离与MAX485器件,又有效的提高了抵抗传输电缆上高能瞬变噪声的能力;模拟部分采用自恢复保险丝,防止外界瞬变高压对装置造成损坏。
2.2 光源部分设计
根据CCD的光谱响应,同时为了减小杂光的干扰,选取了波长850 nm、半功率角45°、光谱半波宽度较窄的红外发光LED组成点阵提供光源,设计时如图5所示。

图5 红外发光LED电路
串联组成的红外发光LED点阵分为16组,驱动信号由2片稳定性好、抗干扰性强的ATmega8提供,由于输入电流与辐射强度成正比,辐射强度的大小制约红外发光LED的发射距离,从而影响纠偏检测装置的测量量程,而由ATmega8产生的PWM驱动信号只有+5 V,驱动能力不足且导致测量量程过小。为了使纠偏装置可以测量更大的范围,运用NPN三极管放大驱动信号,根据红外发光LED的参数计算出每一路驱动信号所能驱动的红外发光LED的数量,从而设计出本装置系统光源长度为500 mm。
2.3 电源部分设计
光源部分与检测部分如图2所示,由于工业现场电磁干扰、尖峰脉冲干扰等干扰因素较多,及+24 V加载到光源部分时,光源加载的高频脉冲会影响检测部分的稳定性,并且检测单元需要一个标准恒定的阈值电压,针对此问题,采用DC/DC隔离电源,使检测单元与供电电源不共地,提高了检测单元的稳定性及抗干扰能力。
3 纠偏检测装置软件设计
本装置软件设计分为光源驱动程序与检测单元程序两部分。软件开发环境为AVR Studio 4,光源部分采用ATmega8芯片,运用端口电平保持功能,编写8路相位相同,频率恒定的PWM驱动信号。
检测单元采用ATmega16芯片,系统程序主要分为:CCD驱动模块、CCD数据采集处理模块,DA模块、通讯模块、移位寄存器模块;此部分设计时也充分应用了端口电平保持功能,产生CCD四路驱动脉冲(转移脉冲为0.5 MHz,设备响应时间为3 ms),在CCD每次进行光电荷转移时进行数据的采集,由于该器件两列奇偶传输,所以每一帧信号共采集2 160次,将采集的信号处理后分别传输给DA模块、通讯模块、移位寄存器模块,对检测的数据进行输出与显示。该装置通讯模块程序基于Modbus协议,采取CRC校验方式,可减小了通讯的误码率。在程序编写时,四路驱动程序及采样程序优先级最大,保证了检测器的实时性与准确性。软件的主程序设计与中断程序设计流程如图6所示。

图6 主程序与中断程序设计流程图
4 实验测试及分析
按图1安装方式进行了大量实验,对装置性能研究。现列举(带钢宽度L=200 mm时)部分实验数据说明装置的精度、线性度、灵敏度、测量范围及安装条件。当无带钢放置时(初始状态:D=500 mm,H=1 365 mm,h=110 mm,m=50 mm)由于器件的制造存在工艺误差,所以导致左右两个装置在满量程时数值不等,操作侧传感器电压UL=10.013 V,传动侧传感器电压UR=10.043 V。
实验一:带宽恒定,带钢初始中心点位于两装置中心线上,向带材轧制方向操作侧偏移为负位移,向传动侧偏移为正位移,此条件下进行两组实验,第一组偏移距离(S)较大,输出电压值与偏移量的关系如表1所示。
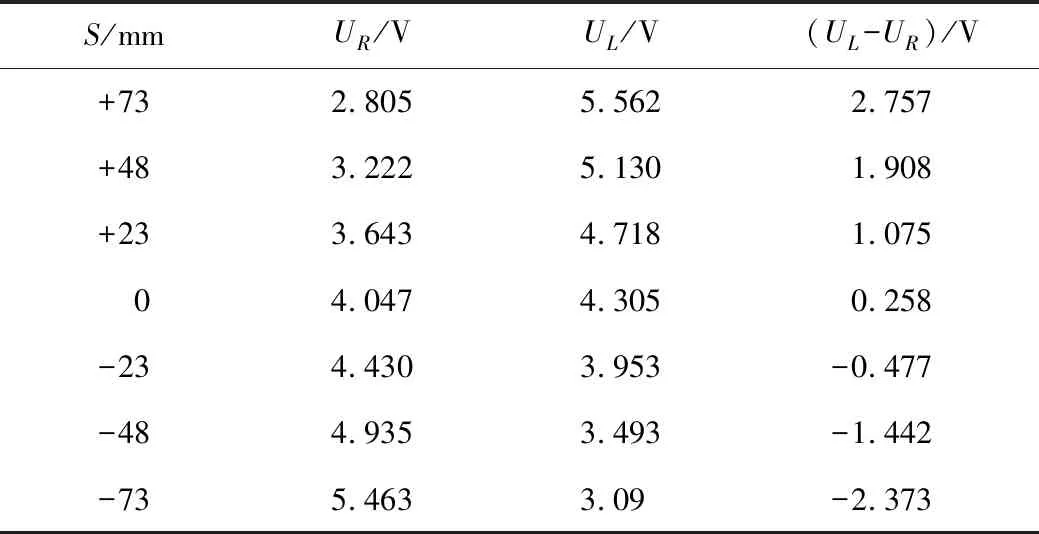
表1 第一组偏移量与输出电压关系
根据MATLAB提供的多项式最小二乘拟合函数polyfit()得:
(1)
第二组偏移量较小,每次偏移1 mm,传感器输出电压值的关系如表2所示。
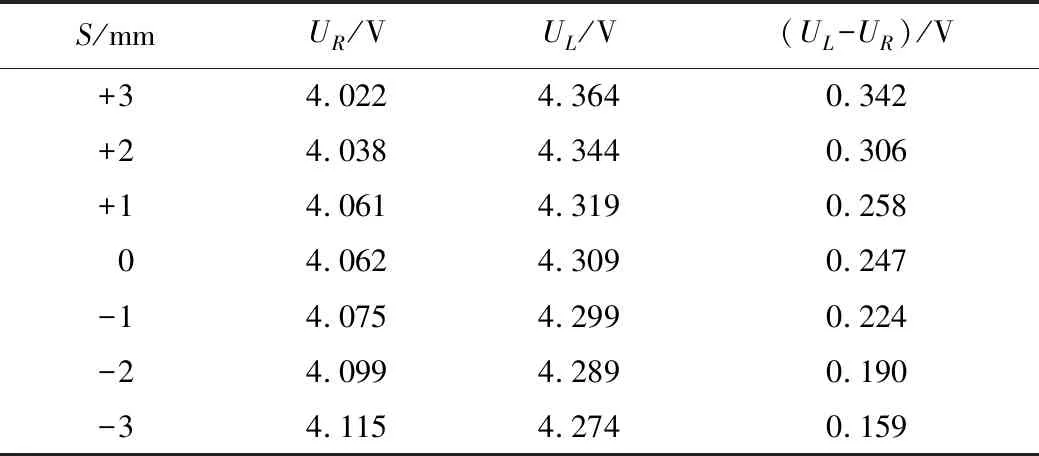
表2 第2组偏移量与输出电压关系
根据MATLAB提供的多项式最小二乘拟合函数polyfit()得:
(2)
分析:通过图7、图8可以明显的观察到在偏移量不同的情况下,装置具有很好的线性度;拟合函数(1)与(2)相同,说明装置的线性度在一定范围内是不变的。同时该实验证明装置在该实验条件下检测范围可达73 mm,精度可达1 mm。
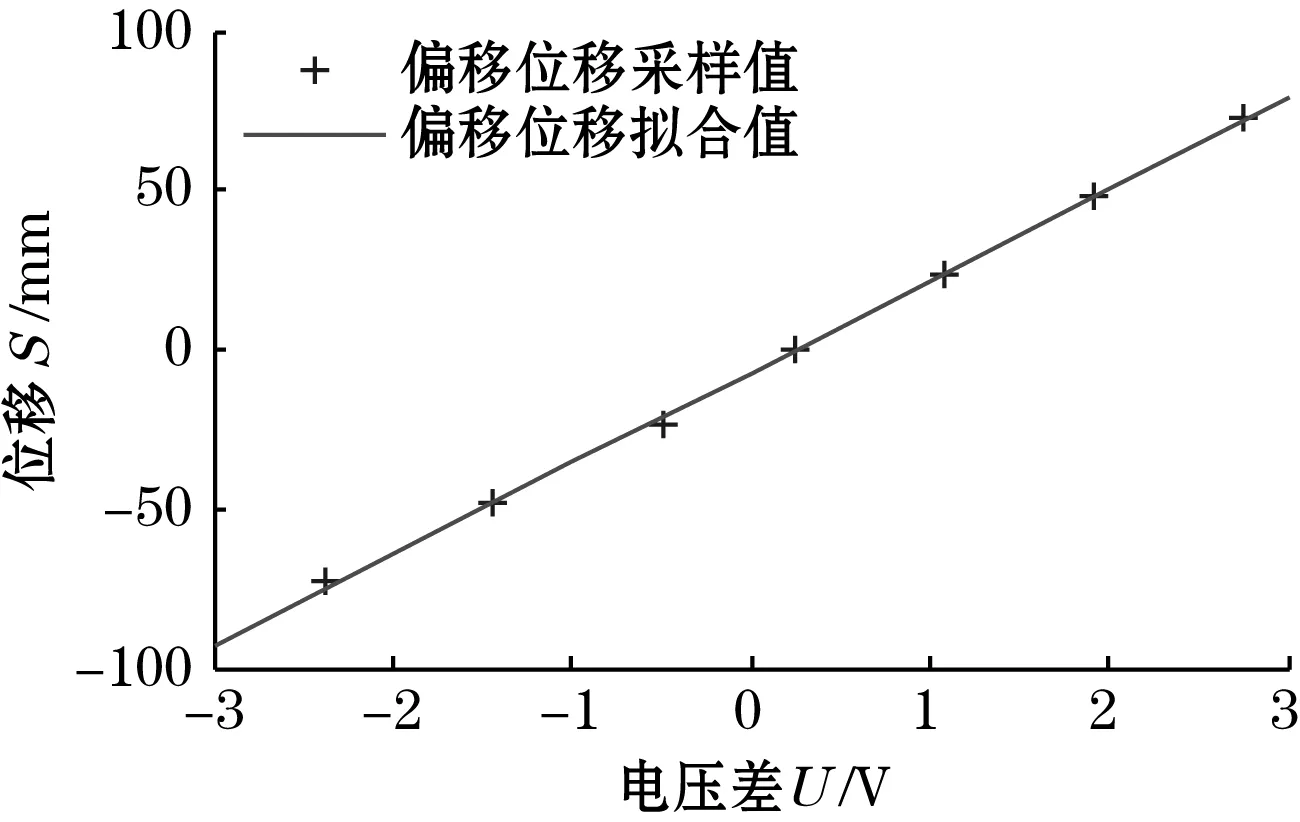
图7 位移与输出电压差拟合图
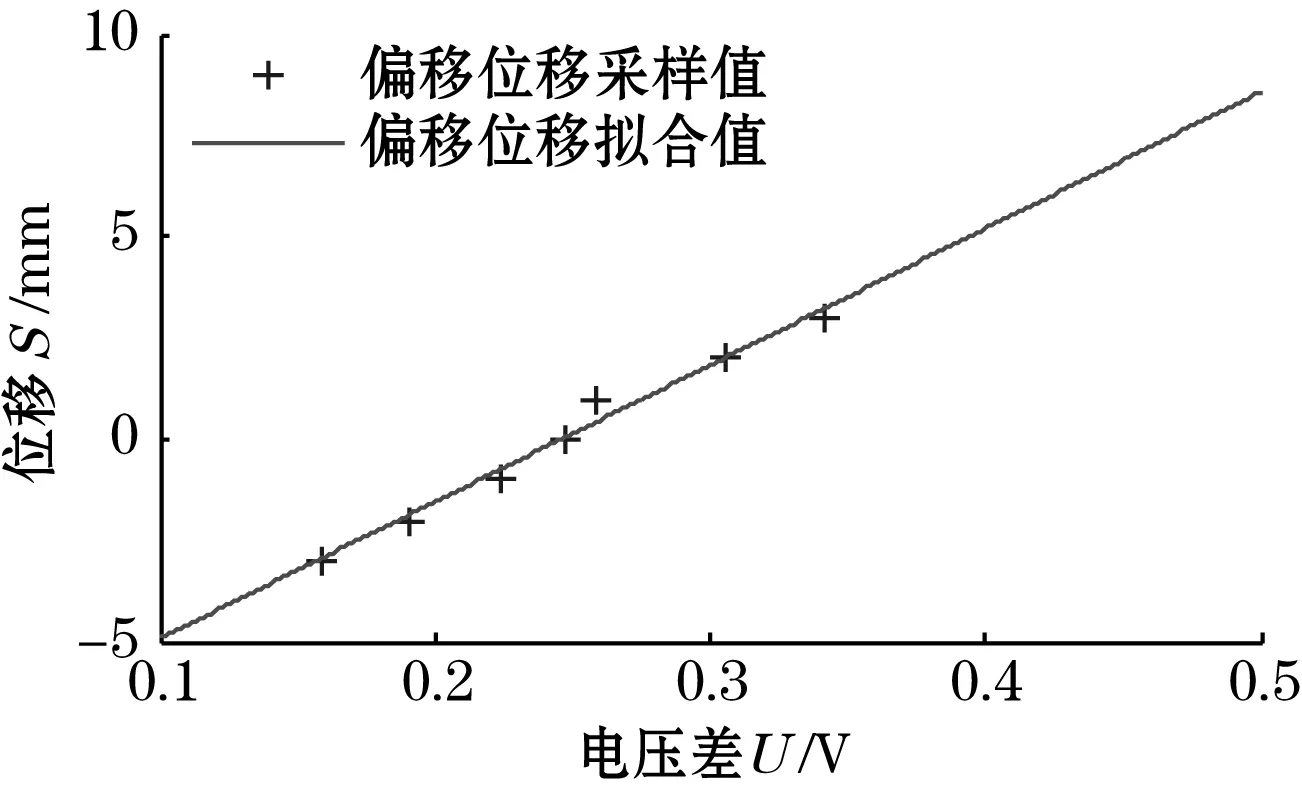
图8 位移与输出电压差拟合图
实验二:本组实验探究带宽恒定(带宽与实验一相同),安装高度与电压输出差值之间的关系。如表3、表4、表5所示。
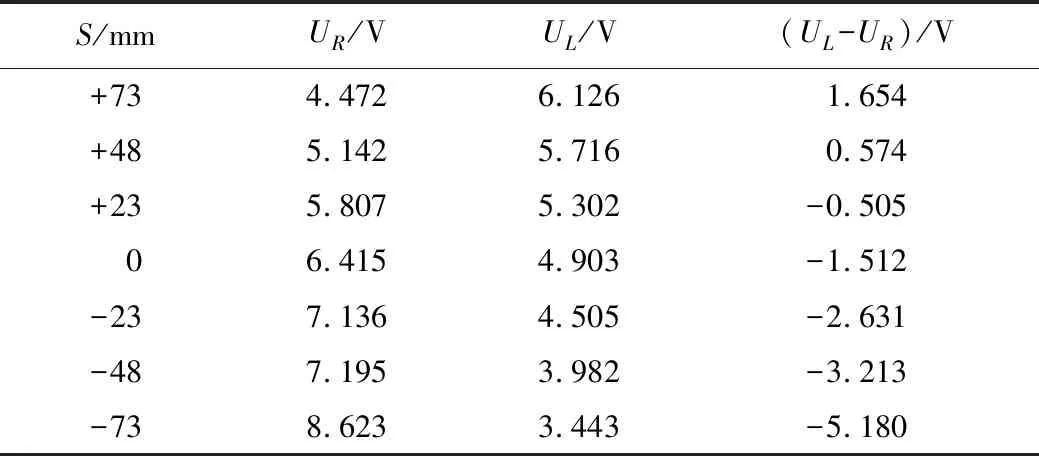
表3 H=1 340时偏移量与输出电压关系
根据MATLAB提供的多项式最小二乘拟合函数polyfit()得:

表4 H=1 315时偏移量与输出电压关系
根据MATLAB提供的多项式最小二乘拟合函数polyfit()得:

(4)
由根据MATLAB提供的多项式最小二乘拟合函数polyfit()得:
(5)
分析:根据以上3组数据与实验一第一组数据,可得图9,在不同高度下电压差有很好的线性度,从而证明装置在不同高度下线性度较高,进而得到表6。

表6 安装高度与公式中斜率的倒数之间的关系
根据MATLAB提供的多项式最小二乘拟合函数polyfit()得:
k=-0.003 654H3+0.001 6H2-2.116 2H+935.609 3
(6)

图9 不同高度时位移与输出电压差拟合图
从本组实验与表1数据分析可得,安装高度直接影响装置的灵敏度,斜率倒数K越大,灵敏度越高。图10反映了装置灵敏度跟随高度变化的趋势。实际安装时根据不同生产要求进行安装,如需较高的灵敏度,可选择安装高度在1 250 mm内。

图10 安装高度与斜率倒数拟合图
5 结论
本装置通过视频检测方式将图像信号转化为模拟信号进行处理,不同于以往用图像处理方式对数字信号进行处理,该装置灵敏度高,分辨率可达2048DPI、检测响应时间3 ms、检测精度为0.5 mm、检测范围可达1 000 mm,完全满足带钢纠偏需求,弥补了红外光敏纠偏传感器在带钢宽度较窄、近距离检测条件下不能正常工作的缺点;同时采取隔离措施,不仅有效的保护装置,也减小了噪声的干扰,提高了系统的稳定性。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
地理空间信息(2022年3期)2022-04-01 14:16:14
房地产导刊(2020年11期)2020-12-28 01:32:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
光源与照明(2019年3期)2019-06-15 09:21:04
制造技术与机床(2017年7期)2018-01-19 02:29:53
测绘工程(2017年3期)2017-12-22 03:24:50
数学小灵通·3-4年级(2017年3期)2017-04-16 04:41:11
通信电源技术(2016年1期)2016-04-16 04:57:31
资源节约与环保(2015年9期)2015-01-27 22:25:42