同轴电缆电容感测式水位传感器设计
2019-03-28 05:34张红娟靳宝全
仪表技术与传感器 2019年2期
薛 瑄,王 宇,王 东,张红娟,高 妍,靳宝全
(1.太原理工大学,新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024;2.太原理工大学电气与动力工程学院,山西太原 030024)
0 引言
水位监测技术广泛应用于工业生产各个领域。水位传感器作为水位监测的核心,直接影响整个监测系统的可靠性[1],因而受到了许多研究者的关注。钟慧琴等设计了一种矿井智能静压力式水位监测仪;O. F. Ameen等提出了一种基于光纤光栅的水位和温度测量方案;徐鸿等提出了一种可测量密闭容器内液位的非浸入式超声导波液位测量方法[2-5]。在上述方案中,光栅液位传感处于实验研究阶段,其余几种传感手段的技术相对成熟。这些方案多借助各种非电参数将水位信息转换为电压信号经A/D转换后进行处理,在模数转换环节引起的误差和干扰不可避免[6];还需指出的是,这些技术在实际工业应用中显现出一些不足,在恶劣水质场合可靠性不高。因此,设计一种能较好适应复杂水质环境、稳定性好的水位传感器仍具重要的现实意义。
本文提出一种以特殊构造同轴电缆作为传感介质的电容式水位测量方法,通过探究同轴电缆的水位-电容传感机理[7],基于单芯片PCAP01电容数字转换方案,实现了测量电容与数字形式放电时间之间的转换,再运用最小二乘拟合与标定算法,设计出一种同轴电缆电容感测式水位传感器,为水位测量技术的多元化提供了新思路。
1 传感电缆的结构与传感机理
水位传感器的传感敏感元件由末端固定不锈钢配重柱的圆筒形同轴电缆构成,其剖面示意图见图1。在传感电缆末端,铜芯固定于配重柱腔内底部,保证铜芯与配重柱的导通,铜丝屏蔽层与铜芯、配重柱可靠绝缘。配重柱腔内注有固化后起绝缘防水作用的胶黏剂。在传感电缆首端,铜芯和铜丝屏蔽层之间经可靠绝缘处理后引入传感处理单元。

图1 传感器的结构与传感机理示意图
Cm=C0+C1+CX
(1)
由同心圆筒形电容的计算公式可知[8],传感电缆内铜芯与铜丝屏蔽层构成的电容为
(2)
式中:ε0为电缆内铜芯与铜丝屏蔽层之间绝缘介质的介电常数;H0为配重柱底部至传感处理单元的电缆总长度;d1、d2分别为电缆内铜芯和铜丝屏蔽层的直径。
传感电缆末端铜丝屏蔽层与配重柱构成的电容为
(3)
式中:ε1为电缆铜丝屏蔽层与配重柱之间胶黏剂等绝缘介质的介电常数;h0为配重柱的高度;D0为配重柱的直径。
以浸入水中部分的传感电缆铜丝屏蔽层与液体作为内外电极板的电容为
(4)
式中:εw为电缆铜丝屏蔽层与水之间电缆绝缘外层的介电常数;H为实际浸没水位。
旅游业的持续发展的前提条件是旅游资源的可持续利用,其基础是环境保护,关键是协调旅游业的发展和资源环境保护的关系,形成旅游业生态系统的良性循环。民族传统体育旅游资源开发的过程中,避免盲目的追求经济效益,过分商品化,加强对民族传统体育旅游资源开发的规划管理,提高对民族传统体育文化的保护和发展意识,形成有利于保护资源、降低成本的运营机制以及有利于资源优化配置的市场运行机制。云南民族传统体育旅游的持续发展,必须把民族传统体育旅游的开发和保护紧密集合起来,使民族传统体育旅游业成为与自然和谐发展的环保型产业[4]。
分析可知,C0、C1均为常量,CX与实际水位H呈正比例关系。测量电容Cm与实际水位H之间的关系可表示为Cm+kH+b的线性关系,且Cm、CX与配重柱高度h0等其他常量、水质环境等外界因素无关。因此,作为传感敏感元件的同轴电缆可将实际水位直接转为与之呈线性关系的电容参数,设计适当的电容测量系统,经转换处理,即可得知水位值。
2 传感器系统的硬件设计
水位传感器的硬件系统由主控MCU与PCAP01电容测量单元、显示单元、红外遥控单元、信号输出单元等外设资源构成,其框图如图2所示。MCU选用基于CIP-51内核的芯片C8051F040,可配合各外设实现对PCAP01电容测量的配置与数据读取、数据转换与标定存取、水位显示与信号输出等功能。

图2 水位传感器的系统硬件框图
2.1 PCAP01电容测量单元
PCAP01是一款基于电容-数字转换(capacitance to digital convert,CDC)单元的电容测量方案,支持单一漂移、单一接地等连接模式。在单一漂移模式下,可补偿芯片内、外部的寄生电容;在单一接地模式下,只能实现芯片内部寄生电容的补偿[9-10]。根据两种连接模式的特点和本传感器的应用环境情况,本系统采用PCAP01单一接地的连接模式实现对传感电缆测量电容的测量。
电容测量单元的原理示意见图3,已知容值的电容Cref一极连接于PCAP01的电容测量端口PC0,另一极与电缆首端的铜芯相接;电缆首端的铜丝屏蔽层连接于PCAP01的电容测量端口PC1,铜芯接于配重柱,通过水与大地相接。

图3 电容测量单元的原理示意图
测量时,PCAP01基于放电时间测量的原理,将Cref、Cm依次与芯片内部的放电电阻相连,构成RC充放电回路。根据电容放电时间τm、τref与电容Cm、Cref的关系式:
(5)
PCAP01在一个转换周期内得到τm、τref的测量结果,并将二者之比以放电时间数字转换(TDC)标准化的数字量,经SPI传输至C8051F040,通过读寄存器Res1读出。对Res1的值进行换算,求出测量电容Cm。根据测量电容Cm与实际水位H的线性关系,可推出当前水位测量值Hm。
2.2 红外接收单元
传感器硬件的红外遥控接收单元用以接收红外遥控按键发出的水位标定标识信号[11],其原理图如图4所示。
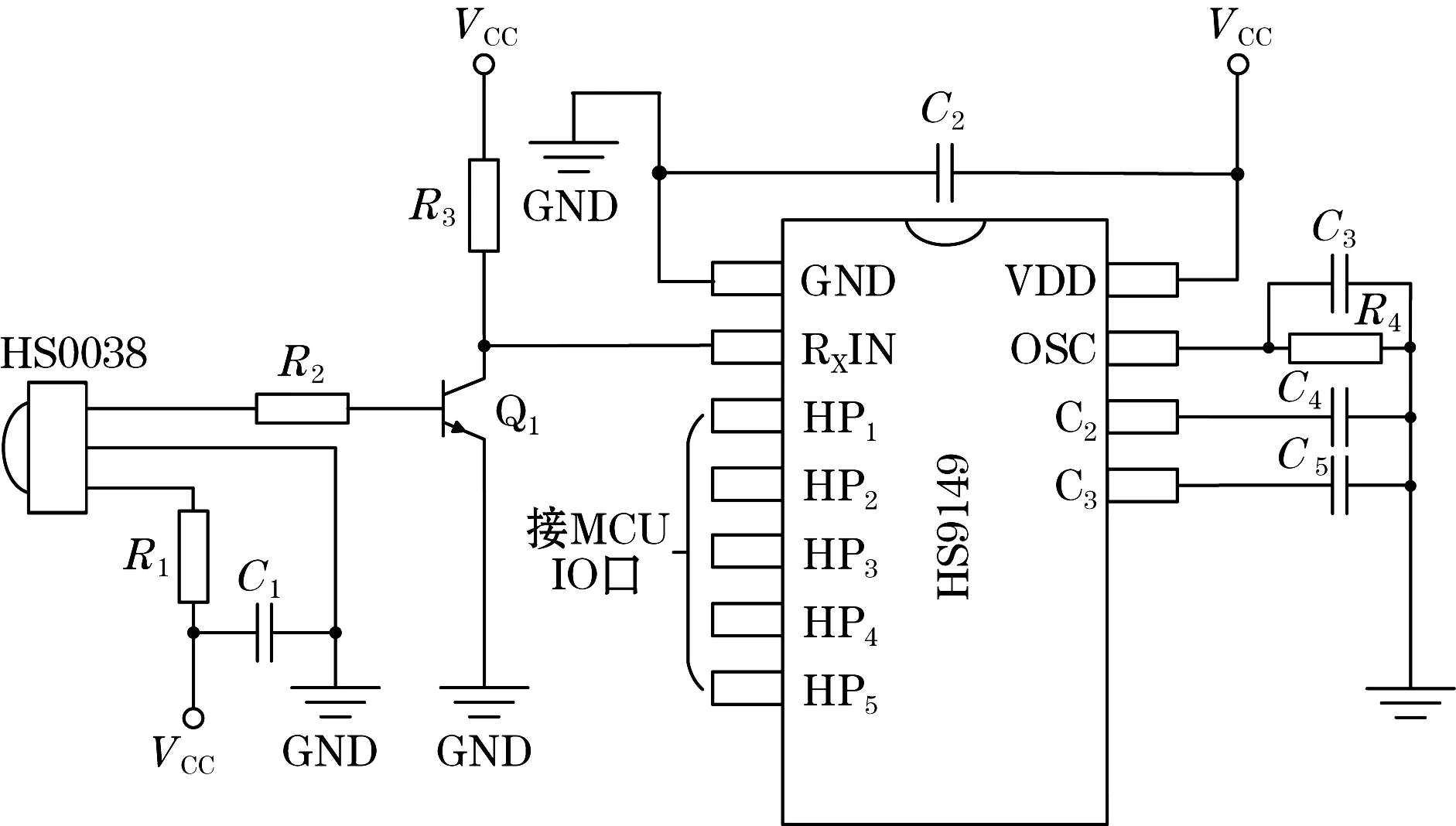
图4 红外接收单元的原理图
本单元依托红外解码芯片HS9149,其引脚C2、C3分别经电容C4、C5接地用以设置其用户码,实现与内嵌对应用户码编码芯片HS9148的红外遥控器相匹配。OSC引脚并联电阻R4和电容C3到地,以产生芯片工作所需振荡电路。引脚HP1~HP5为连续信号输出端口,与MCU 5个IO相接作为标定标识信号的输入端,在对应发射信号输入期间,输出保持高电平。
红外遥控某一按键按下后,接收单元工作时序见图5。HS9148将其用户码、连/单发码、键码信息编码成12位/组的发送命令,调制于38 kHz载波上连续发送。接收端红外接收头HS0038收到载波信号后,对其进行放大、检波,再经三极管Q1取反传至解码芯片的信号输入端RXIN。HS9149对接收到的相邻两组12位命令数据进行逐位比较,在两组数据相同的情况下,使相应锁定选通置位,对应输出引脚的电平由低拉为高,实现对应水位标定标识信号的置位。

图5 红外接收单元逻辑时序
2.3 显示单元
系统采用LED驱动专用集成电路TM1650控制传感器的四位数码管显示,主机通过两线制串行IIC总线协议与TM1650通讯,传递待显示的水位信息,并可实现辉度软调节[12]。
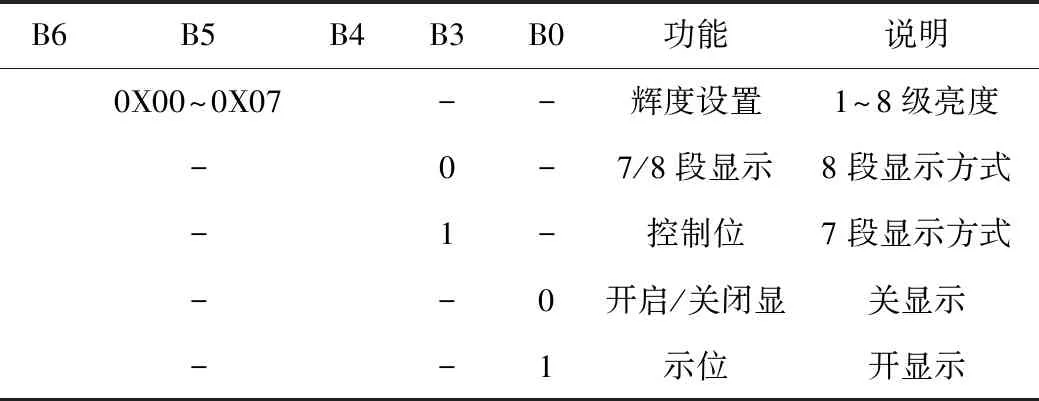
表1 TM1650的显示命令配置表
注:Bi代表一个字节数据的第i位;B7、B2、B1可任取0或1。
显示单元的原理框图如图6,C8051F040的2个IO口被配置为IIC串行同步通信的SCL、SDA端口,用于与TM1650通信。水位显示的具体实现过程是:主机向TM1650发送0X48数据指令后,发送按照表1配置的8位显示命令,完成显示开启、显示方式和辉度的配置;主机将水位数据Hm完成分位处理,并将各位对应的8位标志码按照从高位至低位的顺序依次写至0X68、0X6A、0X6C、0X6E4个地址,即可完成水位显示。

图6 显示单元的原理框图
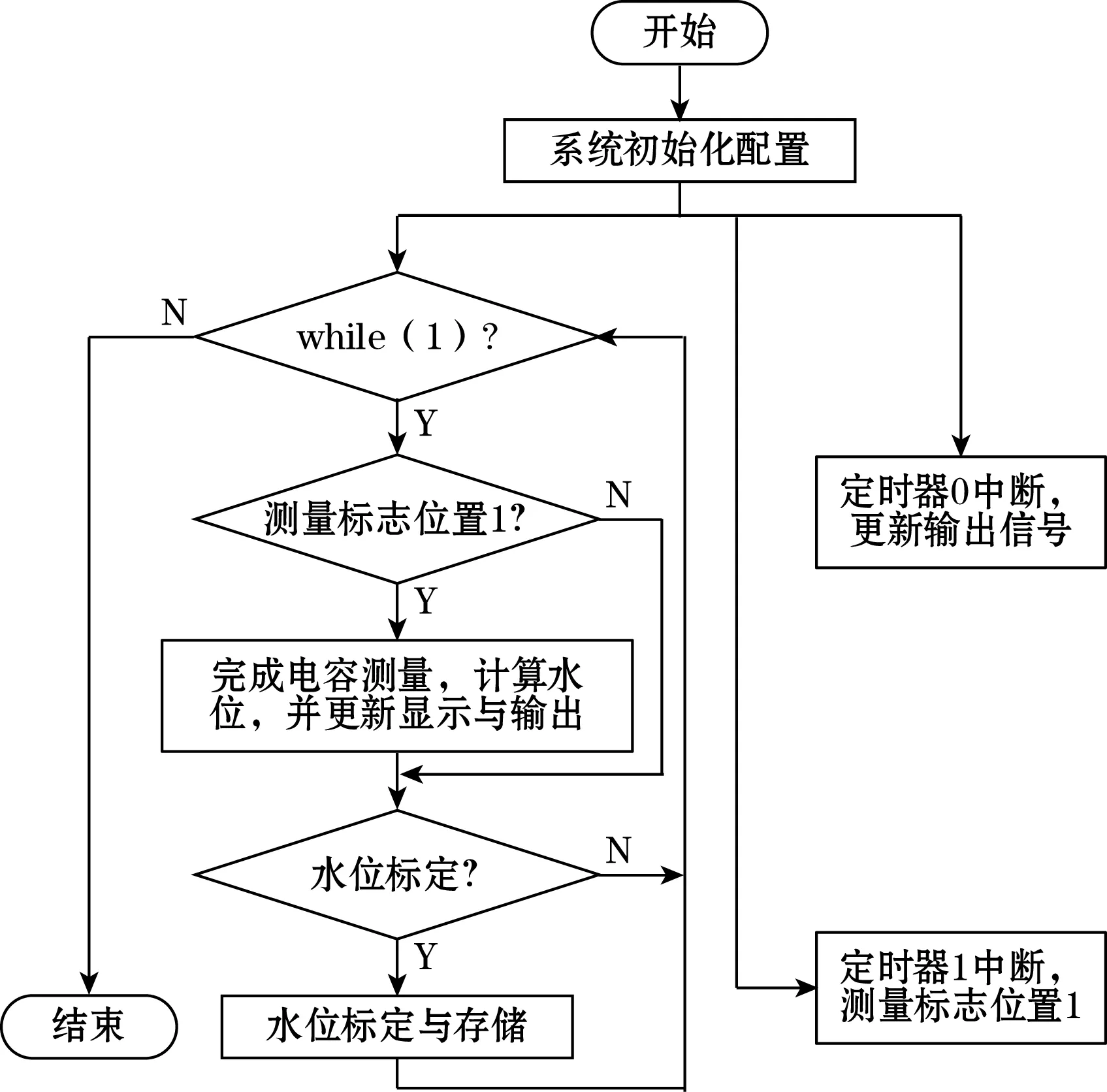
图7 传感器的软件流程架构框图
3 传感器系统的软件设计
传感器的软件设计采用中断-轮询的前后台程序设计思路,系统软件总体流程架构如图7所示。前台中断级程序由用于信号输出的定时器0中断和用于水位测量标志置1的定时器1中断构成,后台任务级程序主要完成电容测量、水位计算与频率转换、显示输出、水位标定与存储等任务。
上电后,进入系统初始化配置阶段。首先完成对MCU时钟、IO交叉复用、定时器模式的初始化;读取系统前次掉电前水位标定点的电容存储值;根据IIC时序规则驱动显示单元的起始显示;采用软件模拟SPI通信的思路实现与PCAP01的通信测试之后,向芯片依次写入标准固件指令和配置电容测量寄存器参数,完成测量初始化,复位开启电容测量。
测量时,后台程序等待水位测量标志位置1。在定时器1定时时间到达后,发生前台定时器1中断,水位测量标志位置1。后台程序在下次主循环起始时进入水位测量任务,测量过程见图8。

图8 水位测量过程框图
水位标定旨在标定传感器水位测量的满度、中位度和零度,提高传感器在不同水质环境的适应性。采用水位标定法计算水位时,测量水位Hm与所测电容Cm满足以下关系:
(6)
式中:Hl1、Hl2、Hl3分别为3个标定点的真实水位;Cl1、Cl2、Cl3分别为3个标定点对应的电容测量值。
本系统利用后台程序扫描HS9149引脚HPi电平状态的方式实现对不同水位标定标识信号的辨别,从而执行对应操作。
当HP1对应的红外遥控器按键按下时,HP1输出电平变为高,识别为标定入口标识符Calibra_In置1,进入水位标定任务,LED显示‘0000’;之后按下HP2对应按键,第一标定点标识符Calibra_Fir置1,LED显示‘0001’,此时将传感电缆置于零度标定水位Hl1,记录电容测量值Cl1;继续按下HP2对应按键两次,依次识别为第2、第3标定点标识符Calibra_Sec、Calibra_Thir的置位,LED依次显示‘0002’、‘0003’,依次将传感电缆置于中位度、满度标定水位Hl2、Hl3,并记录电容测量值Cl2、Cl3;继续按下HP3对应按键,识别为标定完成标识符Calibra_Ext,LED显示‘0004’,此时将三个标定点的水位参数Hl1、Hl2、Hl3和电容参数Cl1、Cl2、Cl3存储于MCU的非易失性数据存储区用以掉电后标定数据的保存,完成水位标定与存储后退出标定任务。
4 实验与测试
系统设计完成后,为对传感器的性能进行评估,在实验室环境下搭建了如图9所示水位测量实验平台,其中,积水底部沉积有淤泥杂质。首先完成对带配重柱传感电缆的电容测量,之后进行了水位-电容线性关系验证实验、0.1~1.0 m测量范围内拟合法与水位标定法测量精度对比实验。

图9 传感器实验测试实物图
本实验所用传感器的传感电缆(含配重柱)总长为2.98 m,在不放入水中的条件下,本测量系统测得的电缆电容值为246 pF,即C0、C1之和的测量值为246 pF。
根据传感机理分析可知,浸于水面以下的传感电缆长度即为水位高度。考虑实际测量条件,进行水位-电容关系验证实验前,在电缆上每隔10 cm作刻度标记。实验时,依次使水浸没传感电缆的标记刻度,记录处理单元在对应刻度电容测量值,作出测试结果的散点分布,如图10所示。
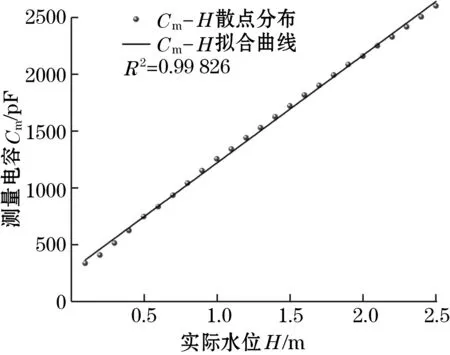
图10 Cm-H关系散点分布与拟合图
由图10可以看出,在0.1~2.5 m的水位测量范围内,传感电缆所测电容Cm随实际水位H增加而增加,不受沉积淤泥的影响,测量结果数据见表2。采用最小二乘法对所测数据进行拟合,拟合结果的线性相关系数R2的值为0.99 826,说明Cm与H之间的线性相关性很高,传感电缆的传感机理理论得到论证。

表2 不同水位的电缆电容测量结果
传感器根据最小二乘法得到的Cm-H线性关系完成软件设计后,在0.1~1 m测量范围内,间隔0.1 m进行水位测量,并对测量水位与实际水位进行比较,其结果如图11所示。可以看出,实际水位为0.9 m处的测量误差最大,测量水位为0.938 m,误差为4.2%。测量范围内10个测量点误差方差为0.000 515。
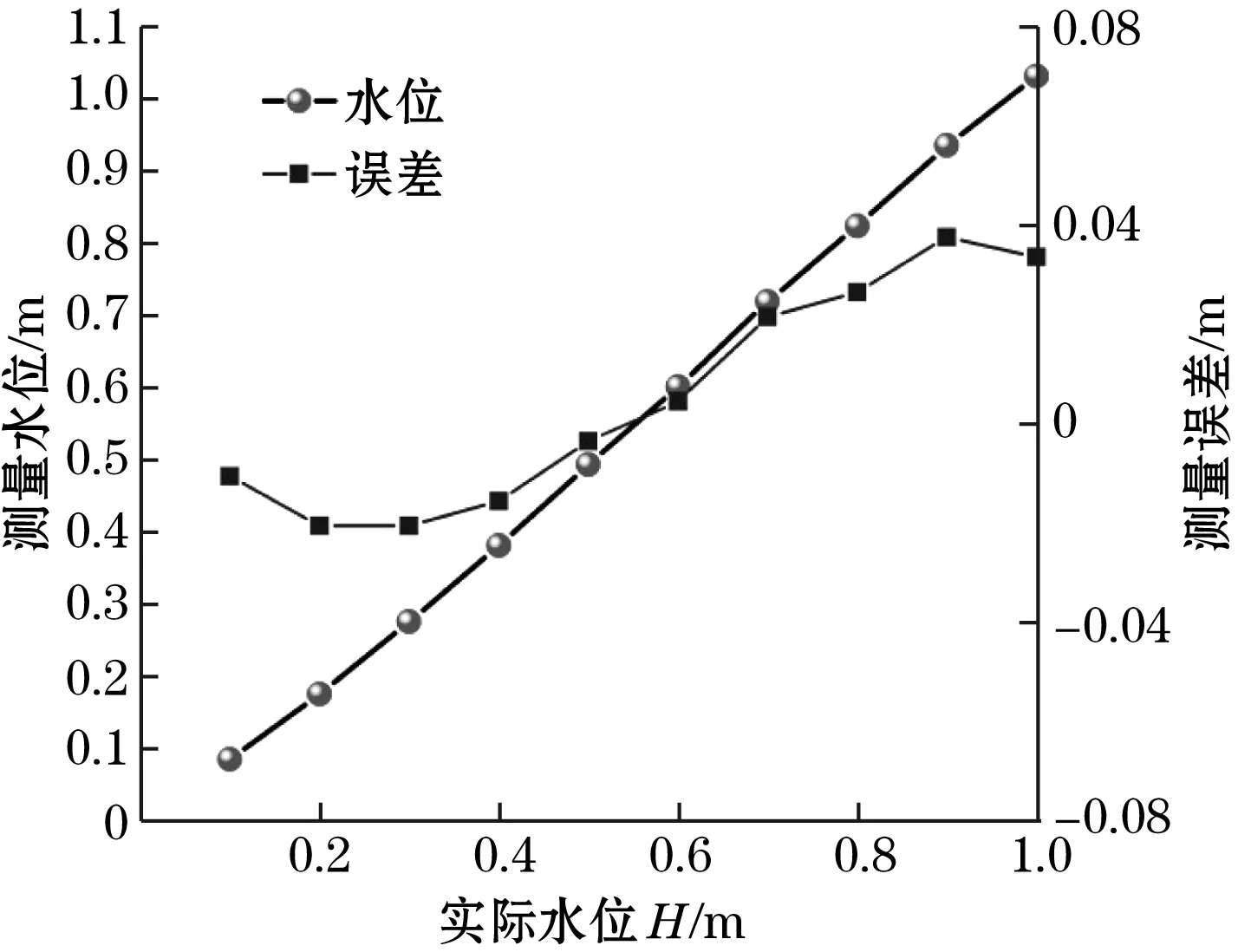
图11 拟合法水位测量结果与误差分布图
系统在上述线性关系的基础上,加入标定算法,进行试验。具体标定设置如下:在0.1~1 m测量范围内,选0.1 m、0.55 m、0.95 m 3个水位作为零度、中位度、满度3个标定点进行标定,之后再次进行测量,得到的水位测量结果如图12所示。从图12中可以看出,实际水位为0.7 m处的测量误差最大,测量水位为0.684 m,误差为-2.3%,测量范围内其余9个测量点的测量精度均达到0.01 m,误差方差为0.000 069。
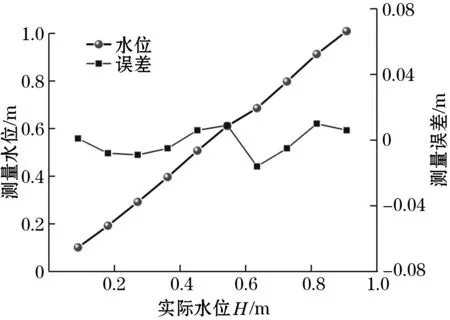
图12 水位标定法测量结果与误差分布图
由图11、图12可知,采用水位标定算法的测量结果比最小二乘拟合法的测量结果误差更小,在0.1~1 m的测量范围内,精度可达到0.01 m。同时,水位标定法选取3个标定点测量,可极大程度抵消电缆微形变、配重柱生锈等外界因素对水位测量的影响,使得传感器适应性更好,故传感器选用水位标定算法作为其水位处理算法。
5 结论
本文提出了一种同轴电缆电容感测式水位测量方法,选择特殊构造同轴电缆作为传感元件,将水位转为电容参数,通过PCAP01电容数字转换方案,运用拟合与水位标定算法,实现了同轴电缆电容感测式水位传感器。实验表明,运用水位标定算法的水位传感器可实现在有淤泥沉淀等恶劣水质情况下较高精度的水位测量,具有较好的稳定性,为复杂水质环境的水位检测提供了解决方案。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
电子制作(2018年23期)2018-12-26
学与玩(2018年3期)2018-08-27
意林(绘英语)(2017年2期)2017-06-05
现代传输(2016年3期)2017-01-15
现代传输(2016年4期)2016-12-01
铁道通信信号(2016年5期)2016-06-01
辽宁省博物馆馆刊(2016年0期)2016-05-17
中国舰船研究(2014年6期)2014-05-14