
BDS/GPS组合伪距单点定位性能分析与评价
2019-03-25 06:40:34崔立鲁安家春
测绘工程 2019年2期
崔立鲁,杜 石,余 寒,安家春,张 涌
(1.成都大学 建筑与土木工程学院,四川 成都 610106;2.武汉大学 测绘学院,湖北 武汉 430079;3.武汉大学 中国南极测绘研究中心,湖北 武汉 430079)
北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)是中国自行研制的全球卫星系统,已于2012年实现亚洲及太平洋地区组网定位,并将于2020年具备全球导航定位能力。加上目前现有的美国全球定位系统(Global Positiong System, GPS)和俄罗斯GLONASS(Global navigation satellite system),以及正在试验并组网的欧洲Galileo系统。人类已经进入了多系统共存的导航定位时代,如何利用这些丰富的导航卫星资源优化卫星空间结构,进而实现高精度导航定位是目前国内外学者研究的重点问题。
以前,有关导航定位研究主要停留在仿真模拟阶段[1-3],近几年来随着北斗系统覆盖亚太地区,数据的获取较为便捷,利用实测数据进行组合定位研究的文章也比较多。其中,唐卫明利用北京和武汉两地的实测数据分析了在多种模拟遮挡环境下BDS/GPS联合解算结果的精度[4];吴甜甜通过比较组合系统在测站周围理想环境和恶劣状态下的定位效果,研究组合系统在不同环境下的定位性能[5];高星伟详细论述了北斗、GPS的时间系统和坐标系统,以及在组合定位中需要注意的问题[6];任晓东利用四大卫星导航定位系统实测数据,初步研究了多系统精密单点定位的性能[7]。目前,北斗系统已经进入了第三阶段,即全球组网阶段,而近几年北斗卫星的发射任务比较密集,因此有必要跟踪分析、监测和评价北斗卫星的性能。本文从组合定位基本原理出发,推导并建立数学模型,利用实测数据验证该数学模型的正确性和可行性,同时将双系统单点定位结果与单系统进行比较,检验双系统的优越性和可靠性。
1 BDS/GPS组合伪距单点定位基本原理
组合单点定位基本思想是将两种导航定位系统的伪距观测值及相关误差放在一起进行联合平差解算。但不同系统的时空基准不一致,在进行联合平差时需要将伪距观测值进行时空基准的统一。
1.1 时空基准的统一
GPS时(简称GPST)是全球定位系统使用的时间系统。它是由GPS系统的地面控制中心和卫星上的原子时共同定义的一种原子时,其起点为1980-01-06 T 0:00:00。在起始时刻与UTC一致。由于UTC存在跳秒,经过一段时间以后,两种时间系统中就会相差若干个整秒[8]。2012-07-01以后,GPST与UTC之间的差异已经达到16 s,即:
GPST≈UTC+16,
(1)
式(1)中近似号是因为GPST和UTC除了由于跳秒累积产生的整秒差异之外,还存在着小于1 μs的秒内偏差,该偏差可以通过GPS卫星广播星历计算得到。
BDT以国际单位制s为基本单位进行时间累积,没有跳秒,是连续时间。BDT的起始时间是UTC时间2006-01-01 T 0:00:00,换算成GPST的星期数和周内秒计数为1 356周,14.000 s。因此BDT和GPST有如下关系:
BDT星期数=GPST星期数+135 6,
(2)
BDT周内秒计数=GPS周内秒计数+14.
(3)
卫星导航系统是由不同国家自己建立的,因此在构建系统的空间基准时都依据本国实际需要,所以在进行多系统组合导航定位时一定要先统一空间基准。GPS采用的是WGS-84坐标,北斗采用的是2000国家大地坐标系(CGCS2000)。两种坐标系统所定义的坐标原点、空间尺度、椭球定向都是相同的[9-10]。对导航定位等绝大多数非精密定位来讲,两者通常被认为相同,不需要进行相互转换。本文在进行研究的过程中,将两者视为同一坐标系。
1.2 组合伪距单点定位基本原理
伪距单点定位观测方程[9]如下:
ρ=s+δtR-δtS+Vtrop+Vion+ε,
(4)
式中,ρ为卫星S到接收机之间的伪距观测值,s为卫星至接收机的几何距离,δtR为接收机钟差,δtS为卫星钟差,Vtrop为电离层误差,Vion为对流层误差,ε为观测噪声。
将式(4)改写成如下方程:
s+δtR=ρc-ε,
(5)
式中,误差校正后的伪距观测值ρc为:
ρc=ρ+δtS-Vtrop-Vion.
(6)
将GPS时间tGPS与北斗系统时间tBD之间的差异记为δtGPS-BD,其定义为:
δtGPS-BD=tGPS-tBD,
(7)
GPS和BD伪距观测方程式分别为:
(8)
误差校正后的GPS和BD伪距观测值分别为:
(9)
将以上两式线性化,并代入i颗GPS卫星数据和j颗BD卫星数据,可以建立如下北斗+GPS联合定位矩阵方程式:

(10)
式(10)中:
(11)
(12)
式(11)中,(x,y,z)为接收机的坐标。根据上述方程式即可求出接收机的坐标[15]。
2 实测数据计算与分析
由于北斗卫星在持续的发射过程中,为了验证最新北斗系统的定位性能,本次实验数据采用的是由武汉大学GPS中心提供的2017-01-01所采集到的北斗和GPS数据。本文采用绝对定位测量模式,分别利用BDS、GPS、BDS+GPS 3种数据解算该测站的坐标,得到该测站全天所有历元计算的结果,与精密单点定位的坐标作差,对数据结果进行比较分析。
目前,北斗系统已经能够提供亚太地区导航定位服务,因此本文选择中国境内BJF1测站进行组合定位的性能分析。为了排除其他误差对计算结果的影响,从该测站2017-01-01筛选出651个历元的数据,分别采用BDS、GPS、BDS+GPS 3种模式来计算该测站的坐标。数据采样间隔为30 s。通过该测站的观测数据计算结果统计得到测站X、Y、Z3个坐标值的残差、卫星平均个数及PDOP的平均值如图1所示。
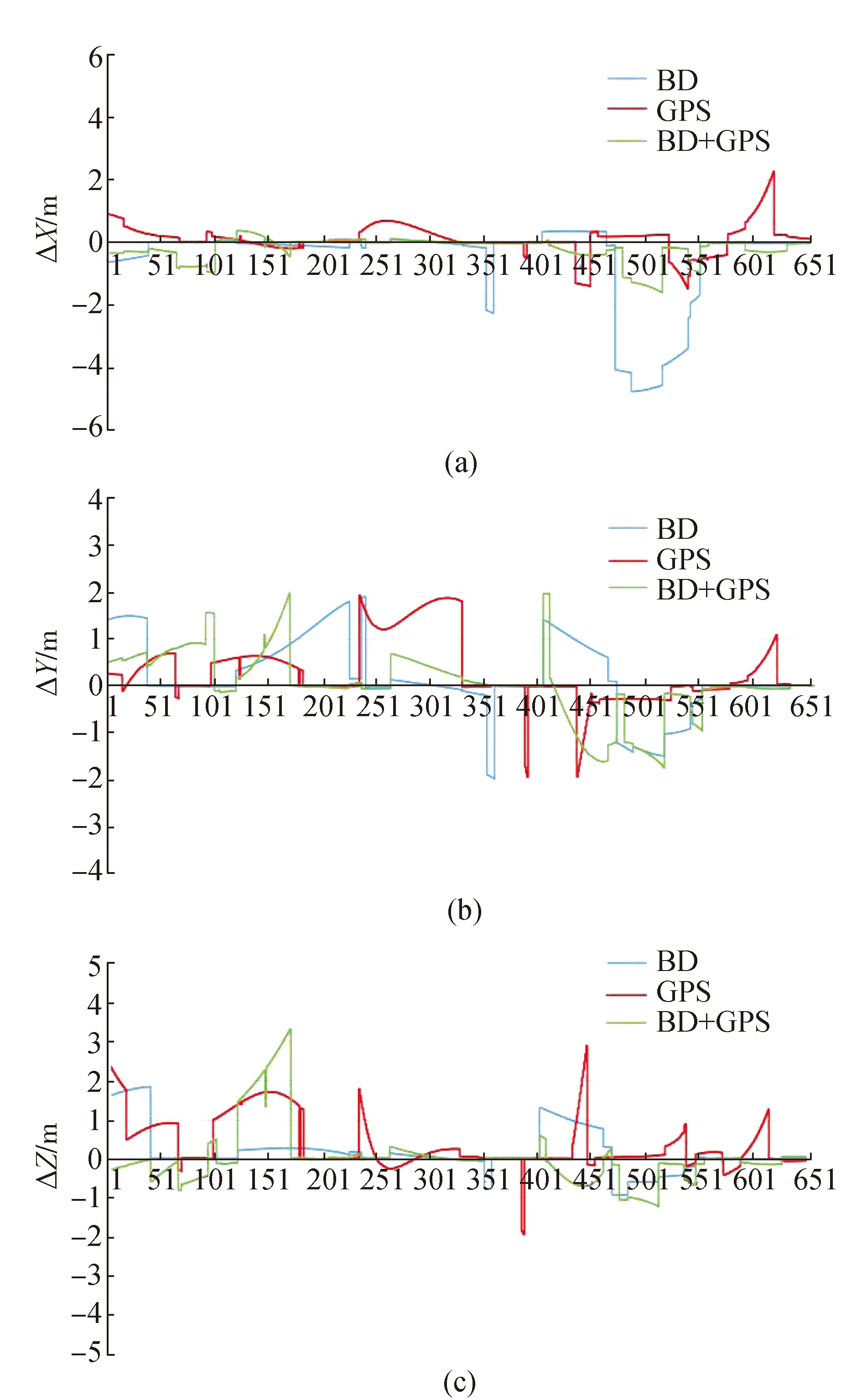
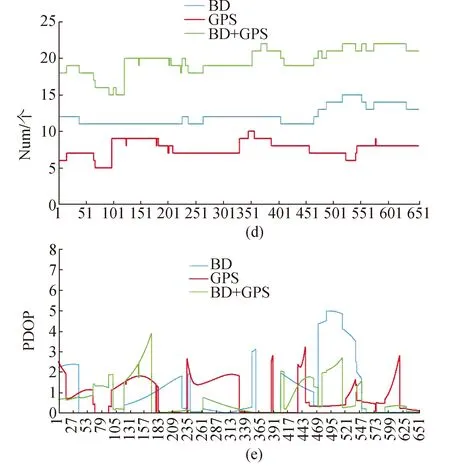
图1 测站BJF1在X、Y、Z方向上的残差和卫星个数及PDOP值随历元变化
图1(a)—图1(c)是测站BJF1坐标在X、Y、Z3个方向的残差值,图1(d)表示为测站上空的卫星个数,图1(e)表示PDOP值的变化。其中BD表示单独利用北斗数据解算的结果,GPS表示单独利用GPS数据的解算结果,GPS+BD表示北斗+GPS组合定位解算的结果。
表1给出了利用3种模式解算得到的BJF1测站X、Y、Z3个方向的均方根误差,以及3种方法中1 d内的平均卫星个数、PDOP的平均值,还有北斗+GPS组合定位分别相对于北斗单系统、GPS单系统的提高率。
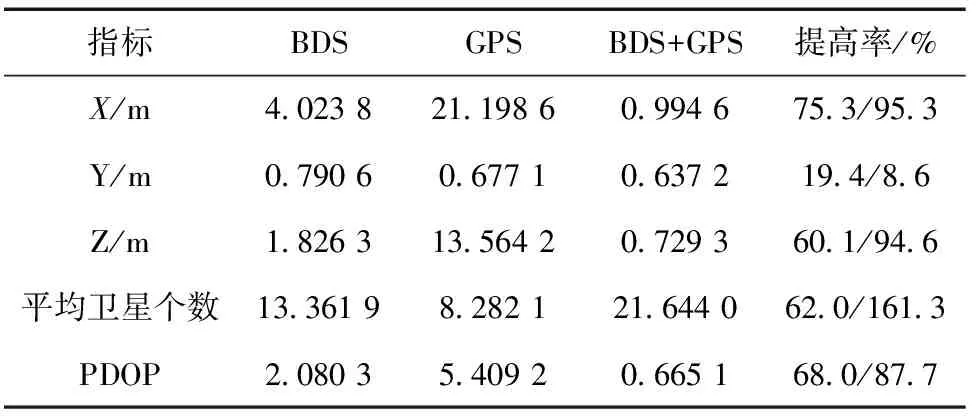
表1 测站BJF1在X、Y、Z方向上的均方根误差、平均卫星个数及PDOP值
从图1和表1看出,在X方向上,北斗+GPS组合定位精度最好,相对于北斗单点定位提高了75.3%,相对于GPS单点定位提高了95.3%,说明北斗在X方向上的定位精度要高于GPS;在Y方向上,北斗+GPS组合定位精度最好,相对于北斗单点定位提高了19.4%,相对于GPS单点定位提高了8.6%,说明GPS在Y方向上的定位精度要略高于北斗;在Z方向上北斗+GPS组合定位精度最好,相对于北斗单点定位提高了60.1%,相对于GPS单点定位提高了94.6%,说明北斗在Z方向上的定位精度要高于GPS。总体来说,北斗单点定位精度要高于GPS。3种定位模式的解算结果表明Y方向上的精度均高于X、Z方向上的。
图1的结果还表明:北斗定位的稳定性较GPS要差一些,而北斗+GPS组合定位的稳定性是最好的。北斗PDOP值略高于GPS,是因为采用的测站数据位于中国大陆,但是目前北斗系统仅能实现亚太区定位,未能实现全球定位所造成的。同时,北斗+GPS组合定位的PDOP值相对于GPS要低些,这是由于组合系统卫星数要多于GPS,因此在某种程度上卫星星座的几何结构得到了优化,使PDOP值大幅下降。而北斗的PDOP值要略低于GPS,虽然北斗仅仅实现亚太地区组网定位,但是因为选择的测站处于中国大陆,北斗的卫星数量要多于GPS。
为了更好地检验双系统在有遮挡情况下的定位精度和运行稳定性,本文设计了如下实验,分别计算卫星截止高度角为10°,20°,30°的条件下,测站上空的可见卫星数(见图2(a)),PDOP值(见图2(b)),均方根误差(见图2(c))和稳定率(见图2(d)),其中稳定率=成功解算的历元个数/总历元的个数。
图2 测站BJF1随截止角变化的可见卫星数、PDOP、均方根误差以及稳定率
从图2可以看出,随着截止高度角增加,定位的三维坐标误差在持续增大,组合系统的定位精度总是高于单系统。当截止高度角增加,GPS卫星数减少速度比北斗和双系统要慢,组合系统的PDOP较单系统稳定。从稳定性的角度看,截止高度角的增加对GPS系统的影响较小,组合系统的稳定性主要受北斗系统的影响。总体上看,组合系统在定位精度和稳定性方面均好于单一系统。
3 结束语
随着2020年的临近,北斗卫星系统即将实现全球组网定位,最近几年正是北斗卫星发射任务的密集期,需要根据北斗卫星数量和种类的变化对北斗系统的导航定位性能进行监测与评价。有鉴于此,本文利用实测数据验证北斗系统及其组合系统的定位性能,并得出如下结论:
1)BDS+GPS组合系统在X、Y、Z3个方向的定位精度和稳定性均优于BDS和GPS单系统;
2)BDS+GPS组合系统在任意时刻的卫星数相对于单一系统均大大地增加,且PDOP值远小于单一系统。在截止高度角增加的情况下,组合系统优势较为明显,定位精度和稳定性优于单系统;
3)虽然北斗已经在亚太区域实现了导航定位,但北斗系统定位精度和稳定均低于GPS。这表明北斗系统作为一个新的全球卫星定位系统任重而道远。
随着北斗系统逐步实现全球覆盖,北斗系统及其组合系统的定位精度都将得到极大地提升。如何充分地利用北斗即将服务全球的大好时机,进一步完善北斗软硬件条件提升北斗服务质量,以及在当前多系统共存的背景下,如何利用多系统实现精密定位都是下一步需要研究的重点问题。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘通报(2016年12期)2017-01-06 03:37:13
山东工业技术(2016年15期)2016-12-01 05:31:14
信息记录材料(2016年4期)2016-03-11 15:22:33
导航定位学报(2015年2期)2015-06-05 09:27:38
