
电动静液压主动悬架双滑模控制研究
2019-03-25 06:34寇发荣许家楠刘大鹏
中国机械工程 2019年5期
寇发荣 许家楠 刘大鹏 张 凯 孙 凯
1.西安科技大学机械工程学院,西安,7100542.陕西汽车集团有限责任公司,西安,710200
0 引言
简单有效、性能良好的控制算法一直是主动悬架开发的关键问题之一,近年来受到国内外学者的广泛关注[1-4]。目前已提出了多种应用于车辆主动悬架系统的控制算法,如线性二次高斯(LQG)控制、模糊控制、切换控制[5-7]等。谷成等[8]针对摇臂推杆式电磁主动悬架提出了一种鲁棒控制,并进行了优化分析。汪若尘等[9]针对直线电机与可调阻尼器的混合主动悬架提出了一种多模式切换控制策略。汪少华等[10]提出了一种基于电动空气悬架的神经网络PID控制策略。对于主动悬架控制策略的研究,许多学者忽略悬架与其执行机构的相互作用关系,将执行机构理想化,但执行机构是悬架输出主动力的直接部件,影响悬架的性能与车辆整体的动态特性,故需要对执行机构进行建模,并分析其对悬架动态特性的影响。滑模控制的滑动模态对加给系统的干扰和系统摄动具有完全的自适应性,能保证系统按照预定的滑模面进行工作,十分适用于车辆悬架系统的控制。
本文在研究电动静液压作动器(electrostatic-hydraulic actuator,EHA)主动悬架的基础上,考虑EHA主动悬架控制要求及其执行机构(无刷直流电机)的特性,设计了一种EHA主动悬架双滑模控制策略,利用MATLAB/Simulink软件进行仿真分析,并开展了台架试验。
1 EHA主动悬架结构与原理
EHA主动悬架系统结构见图1。主动悬架系统由螺旋弹簧和EHA两部分组成,其中EHA由液压缸、液压马达、无刷直流电机、控制器、电源及相应的信号检测装置组成。
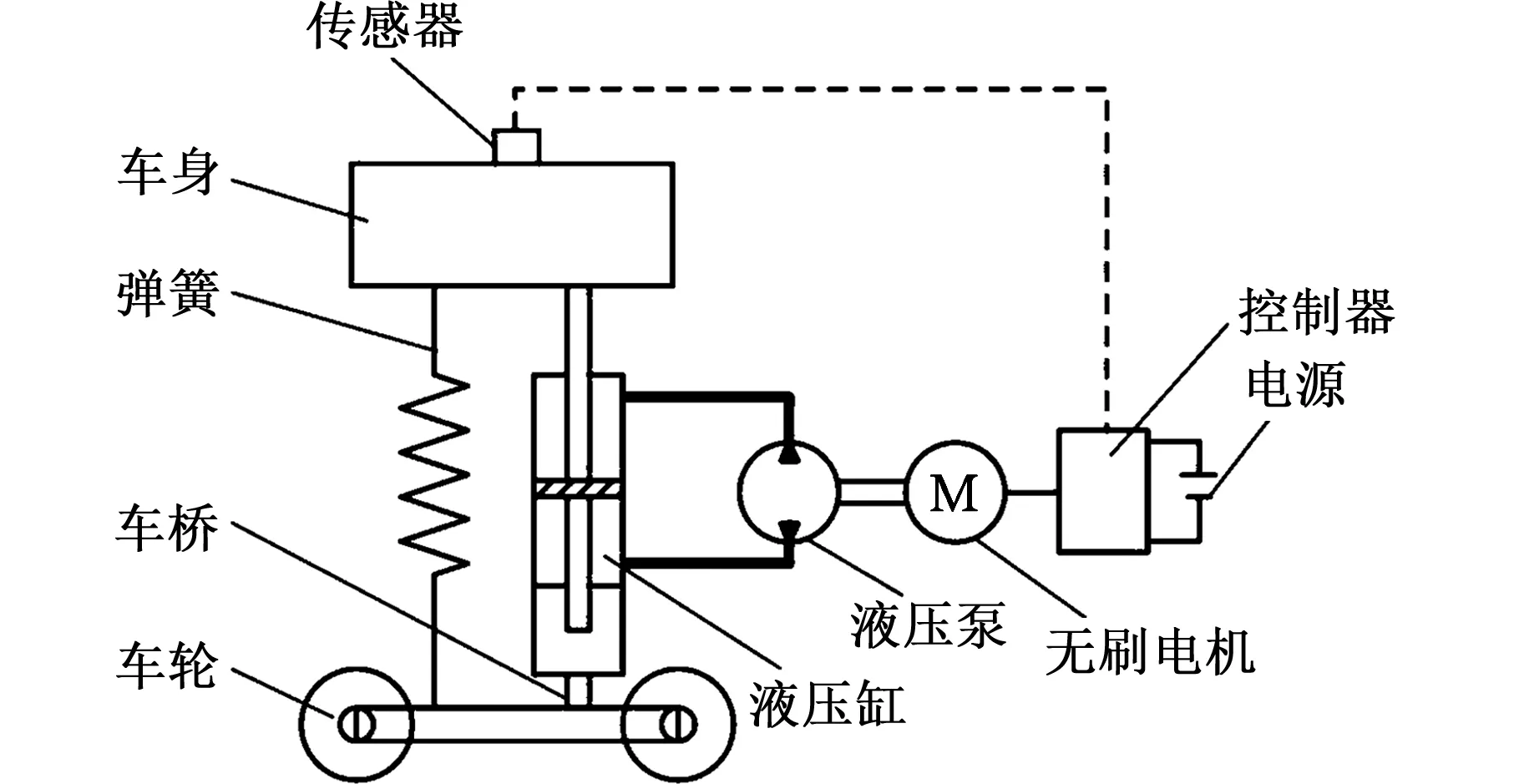
图1 EHA主动悬架结构原理图Fig.1 Schematic diagram of EHA active suspension structure
EHA主动悬架系统工作原理为:当车辆通过不平路面时,车轮受到振动激励,并将振动传递给车身;传感器检测到车身、车桥的位置以及加速度的变化,并通过信号处理电路将该信号传递至主动悬架控制器;控制器根据控制策略计算出克服振动所需的理想主动力,并根据理想主动力输出脉宽调制(PWM)信号,然后通过驱动电路控制无刷直流电机的转速和方向,使作动器输出实际主动控制力。
2 EHA主动悬架动力学模型
分别搭建车辆二自由度模型、无刷直流电机模型和液压系统模型,进而建立EHA主动悬架动力学模型,推导出实际输出主动力公式,为控制策略设计奠定基础。
2.1 车辆二自由度悬架模型
车辆二自由度悬架动力学模型见图2。
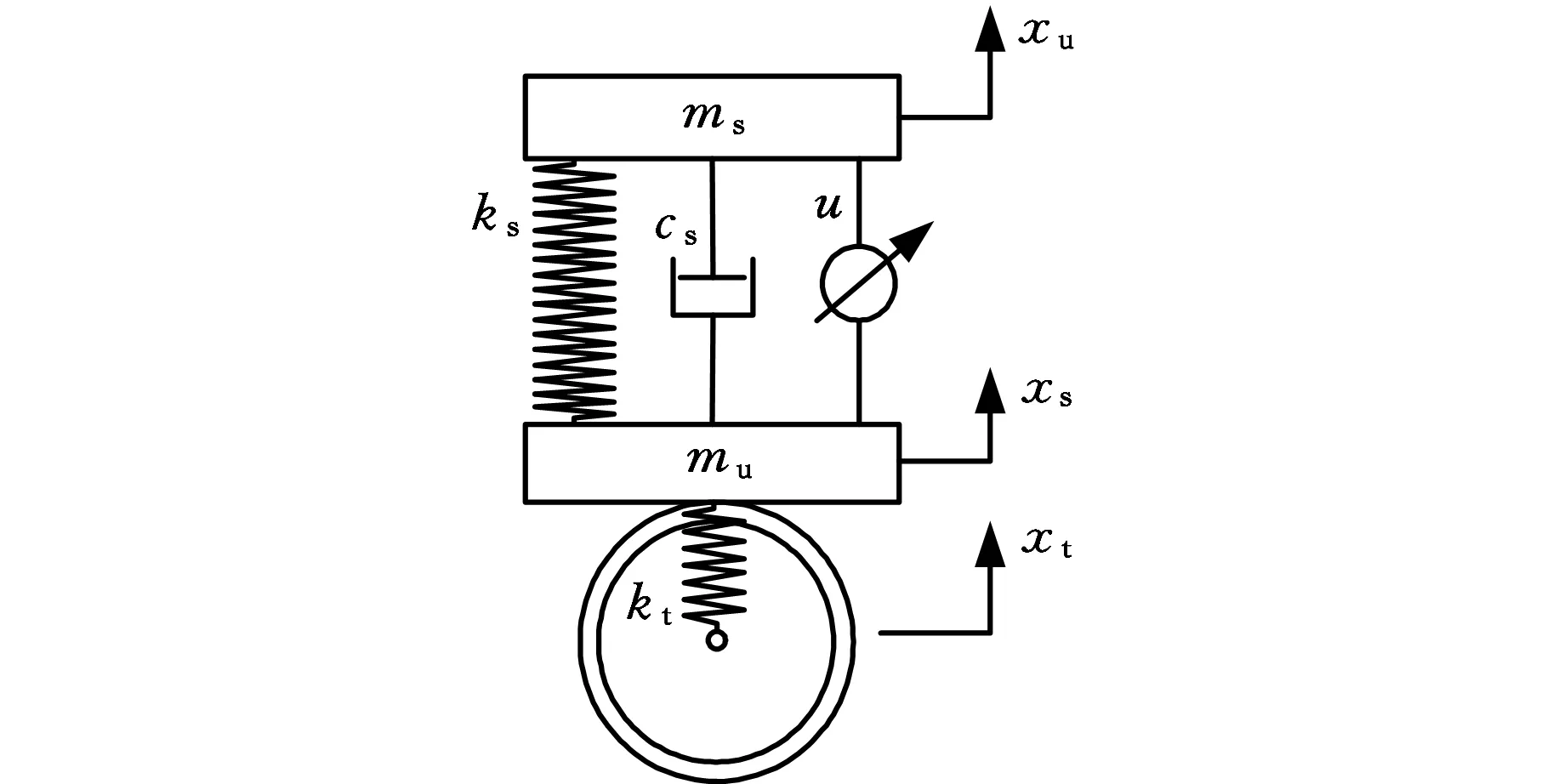
图2 车辆二自由度悬架动力学模型Fig.2 Vehicle 2 degree of freedom suspension dynamics model
根据牛顿第二定律,分析得到运动方程组:
(1)

根据EHA主动悬架控制要求,选取状态向量X和输出向量Y分别为
式中,xs-xu为悬架动挠度;kt(xu-xt)为轮胎动载荷;xu-xt为轮胎动变形。
车辆二自由度主动悬架状态方程:
(2)
式中,A为状态矩阵;B为输入矩阵;C为输出矩阵;D为传递矩阵。
2.2 无刷直流电机数学模型
EHA主动悬架所需的主动力由无刷直流电机所输出的负载转矩提供。在三相星形连接的无刷直流电机中,只有两相导通,且电流大小相等方向相反,可得电磁转矩
Te=Kti
(3)
式中,Kt为电机转矩系数;i为稳态时的相电流。
无刷直流电机运动方程表示电磁转矩、转速、负载转矩之间的关系组成:
(4)
式中,TL为负载转矩;B为阻尼系数;J为转动惯量;ω为转子角速度。
2.3 液压系统数学模型
在EHA主动悬架中,无刷直流电机与液压泵通过联轴器相连,在忽略机械损耗的条件下,电机的输出功率等于液压泵的输入功率:
Pin=Tbω=2πTbnb
(5)
式中,Pin为液压泵输入功率;Tb为液压泵输入转矩;nb为转速。
可推得液压泵的输出功率:
Pout=pnbV
(6)
式中,p为系统工作压力;V为液压泵排量。
将式(5)、式(6)联立可得
(7)
式中,η为液压泵工作效率。
EHA主动悬架工作时,液压管路的压力损失主要包括液压管路的沿程损失Δpλ与液压管路的局部压力损失Δpξ:
(8)
式中,λ为沿程阻力系数;l为液压管路长度;d为液压管路直径;ρ为液压油密度;v为管路中油液流速;ξ为局部阻力系数。
液压缸中产生的主动输出力
F1=Ap=A(p-Δpλ-Δpξ)
(9)
式中,A为液压缸有效面积。
液压泵输入转矩Tb与无刷直流电机负载转矩TL相等。联立式(3)、式(4)、式(7)和式(9),得到液压泵输出主动控制力:
(10)
3 EHA主动悬架双滑模控制器设计
双滑模控制系统由系统控制外环和系统控制内环组成,见图3,其中,xsr为理想天棚阻尼系统的簧载质量位移,csky为天棚阻尼系数,BLDCM为无刷直流电机。
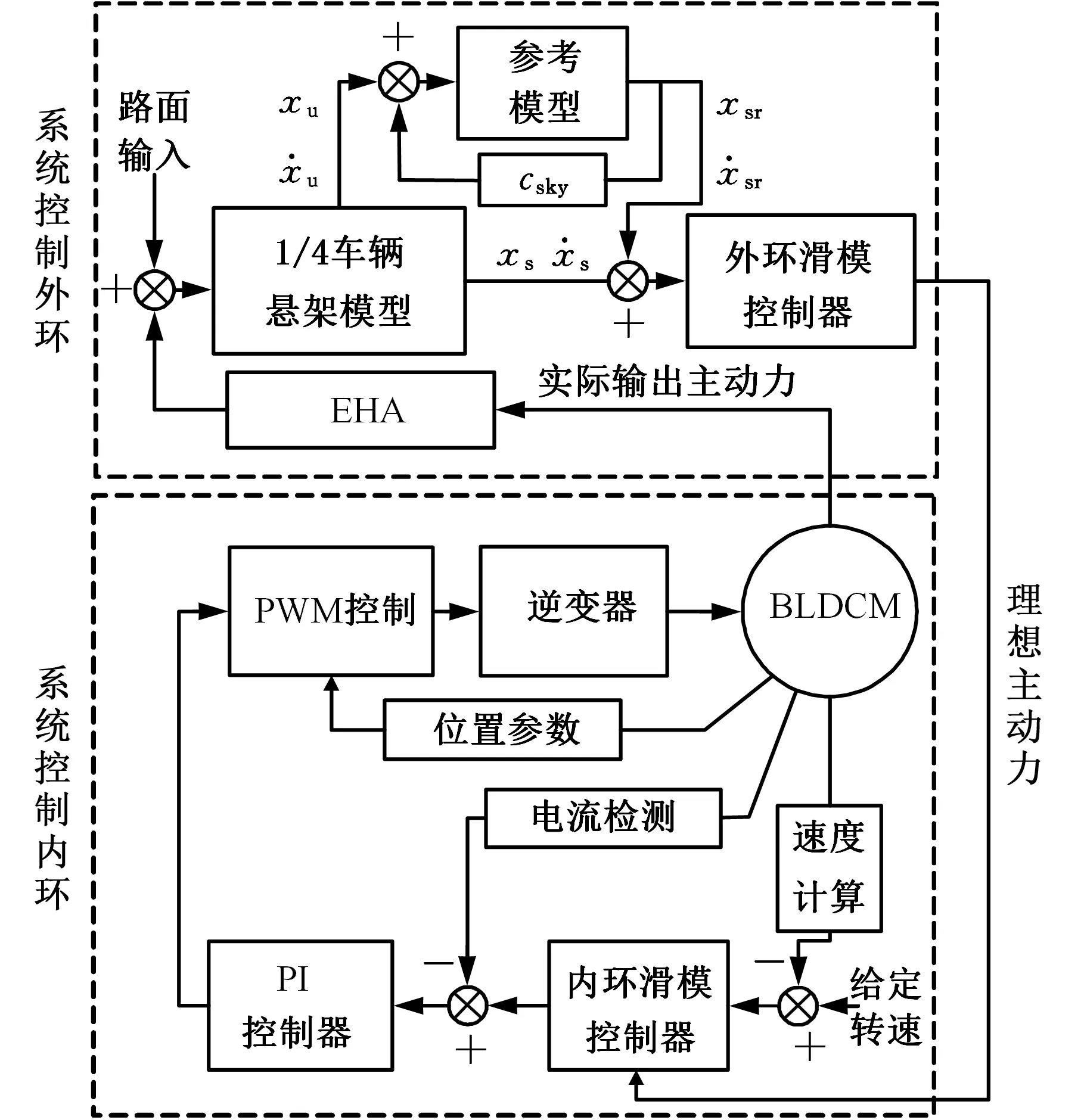
图3 EHA主动悬架双滑模控制系统框图Fig.3 Block diagram of EHA active suspension dual sliding mode control system
控制外环通过对系统变量的跟踪,由参考模型滑模控制器计算出理想条件下的最优主动控制力。控制内环检测无刷直流电机的传感器信号,通过滑模控制器实现对电机转速、电流的控制,实时控制电磁转矩的输出。通过EHA主动悬架力特性试验得到理想主动力与PWM占空比的关系,在任意理想主动力下,由控制器输出与之对应的PWM信号驱动无刷直流电机,带动液压缸与液压泵工作,使控制内环输出的实际主动力对外环计算所得的理想主动力进行跟踪,完成EHA主动悬架的双滑模控制。
3.1 基于模型参考的外环滑模控制器
理想天棚阻尼控制系统具有结构简单、性能可靠、能耗低、工程控制易于实现等优点,但是在实际中,天棚控制对提高车辆动态性能的效果并不明显。
将理想天棚阻尼控制作为1/4车辆悬架的参考模型,见图4。以非簧载质量位移与速度作为输入变量提供给参考模型,使1/4车辆悬架的实际动态性能追踪理想状态下的参考模型,从而得到与参考模型一致的控制效果。
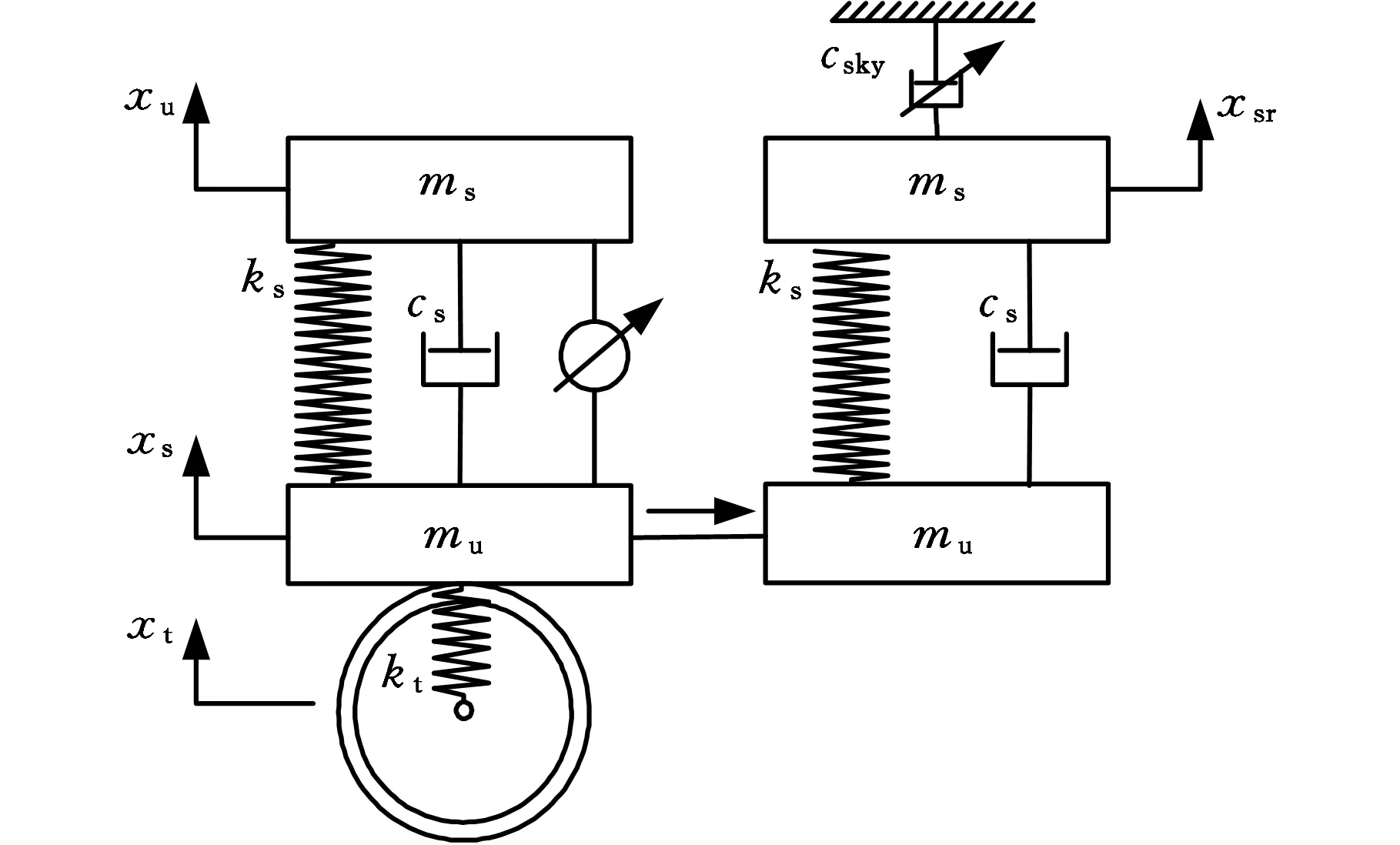
图4 基于天棚参考系统的EHA主动悬架模型Fig.4 EHA active suspension model with ceilingreference system
理想天棚阻尼系统动力学方程为
(11)
定义簧载质量速度误差、簧载质量位移误差以及位移误差的积分为广义误差矢量e,其导数
(12)
可定义EHA主动悬架与参考模型之间的广义误差空间状态方程为
(13)
其中,矩阵Am、Bm和g由式(2)推导而来。
采用极点配置法设计切换平面[11]:
s=cTe
(14)
式中,s为切换平面;c为系数矩阵。
切换平面s的导数为

(15)
为保证广义误差滑模面的渐近稳定性,必须使滑模运动方程的全部特征根位于复平面左半平面上,一般令c1=1,可求得c2=10,c3=31.25。
采用指数趋近律[12],可得

(16)
式中,-kε为指数趋近项,是影响滑模控制抖振与趋近速度的系数。
由式(15)与式(16)可得基于参考模型的滑模控制器的理想主动力:
FL=msεsgn(s)+mskε+cskyxsr+(msc2-cs)e1+(msc3-ks)e2
(17)
3.2 电机内环滑模控制器
滑模控制进入滑动模态后,对系统的干扰具有很好的自适应性,其高速切换特性对无刷直流电机负载的变化和绕组换相引起的电流波动也均具有较好的抑制功能[13]。
趋近速度是滑模控制的重要评价指标之一。指数趋近律能加快趋近过程,削弱抖动[14],因此选取指数趋近律来提高系统的动态品质:
(18)
滑模控制器根据电机实际转速与给定转速的差值进行调节,建立误差方程:
e(t)=ωr-ω
(19)
式中,ωr为给定角速度;ω为实际角速度。
为了更好地消除抖振,在切换函数中引入积分项[15],则滑模面切换函数为

(20)
(21)
联立式(18)与式(21)可推导出内环滑模控制器输出相电流,为了解决抖振问题,采用饱和函数sat(s/δ)替换式(18)中的sgn(s):
(22)
式中,δ为滑模面的边界层厚度。
将式(22)代入式(10),可得EHA主动悬架实际输出主动力。
4 仿真分析
为了验证EHA主动悬架双滑模控制的效果,在MATLAB/Simulink环境下建立了EHA主动悬架系统仿真模型,EHA主动悬架主要参数如表1所示。
以车速30 km/h,C级路面下的随机路面和频率为1 Hz、幅值为30 mm的正弦激励作为路面谱输入。为了验证双滑模控制策略的有效性,定义一种外环控制策略为天棚阻尼控制,内环控制策略为电流转速双闭环控制的主动悬架控制策略[16],称为控制策略Ⅰ,称双滑模控制策略为控制策略Ⅱ,与被动悬架进行对比仿真分析。
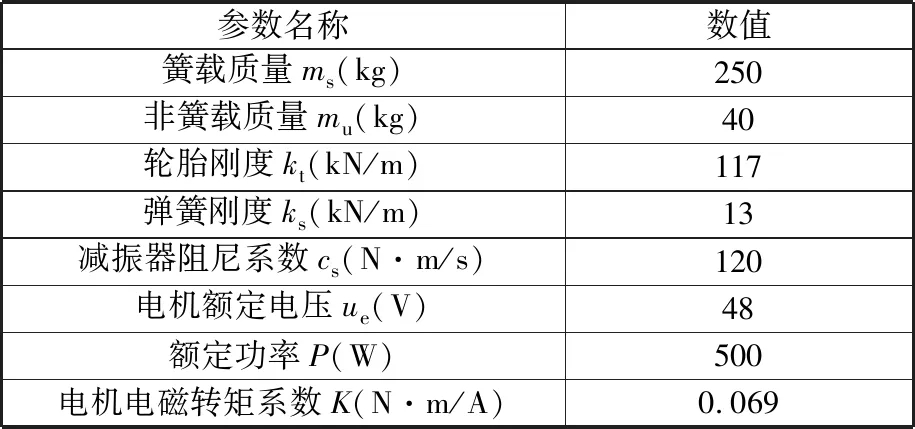
表1 模型主要参数
4.1 输出主动力仿真分析
在无刷直流电机的驱动下,将EHA主动悬架系统实际输出的主动力能否对理想主动力进行跟踪作为控制策略的重要评价指标。EHA主动悬架输出主动力对比结果如图5所示。
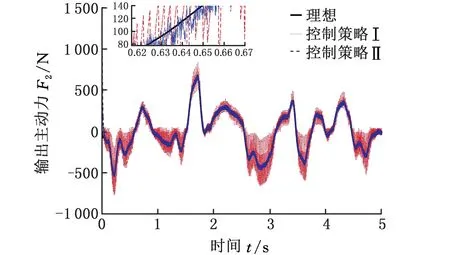
(a)随机路面激励下EHA主动悬架输出主动力对比
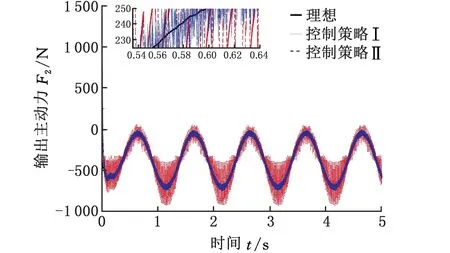
(b)正弦路面激励下EHA主动悬架输出主动力对比图5 EHA主动悬架输出主动力对比Fig.5 EHA active suspension output main power comparison
由图5仿真结果可得,对比于控制策略Ⅰ,双滑模控制策略既可以有效跟踪理想主动力,又可以减小输出主动力的波动。为了进一步得到输出主动力与理想主动力的关系,仿真分析了两种控制策略输出主动力与理想主动力的绝对误差。图6为其绝对误差仿真分析图。绝对误差均方根值如表2所示。
通过计算得到,相比于控制策略Ⅰ,双滑模控制策略下输出主动力的绝对误差均方根值在随机路面下降低41.4%,在正弦路面下降低37.1%,这表明双滑模控制策略能够降低EHA主动悬架输出主动力的脉动。
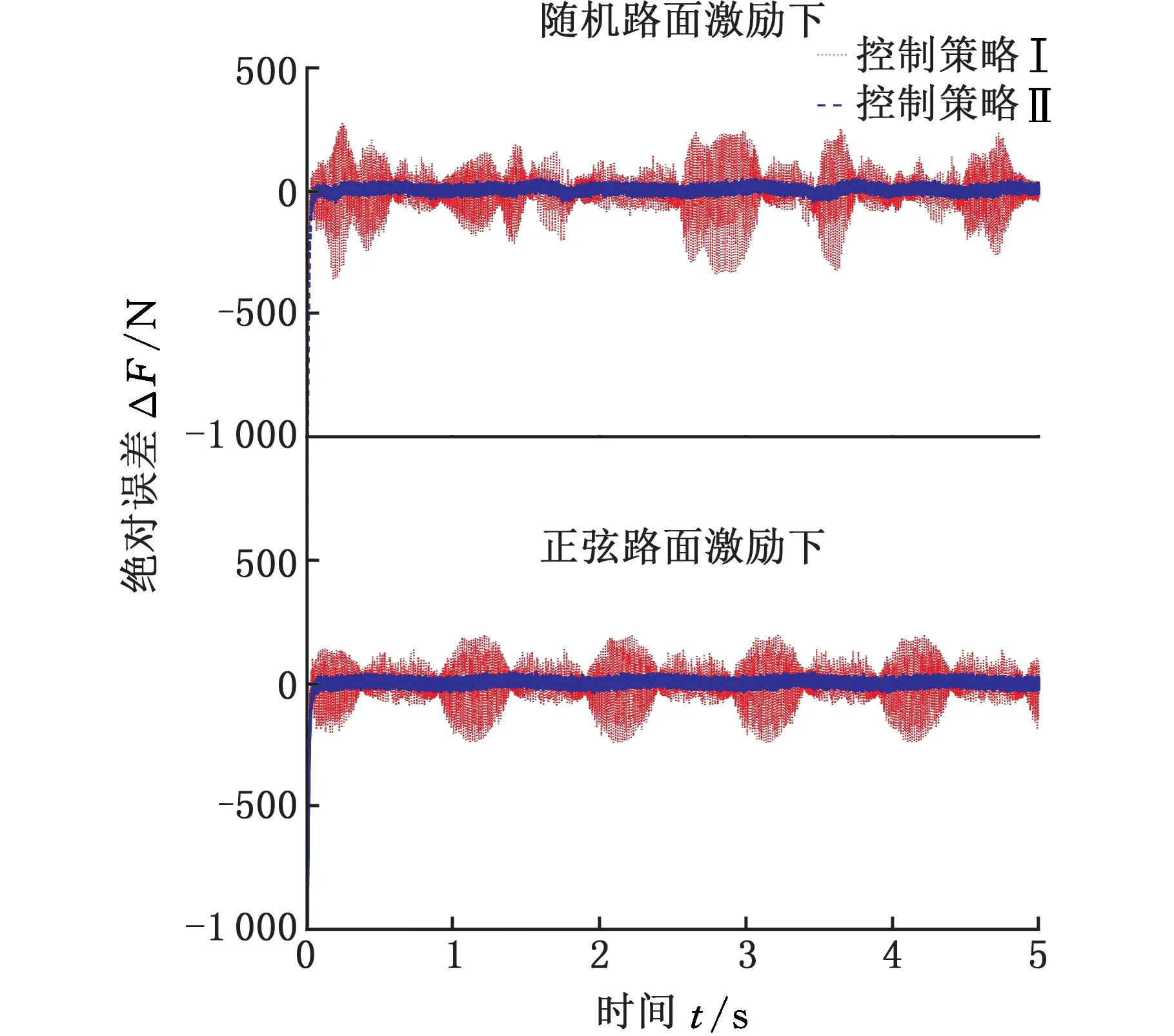
图6 EHA主动悬架输出主动力绝对误差Fig.6 Absolute error comparison of EHA active suspension output main power

表2 绝对误差均方根值
4.2 悬架动态特性仿真分析
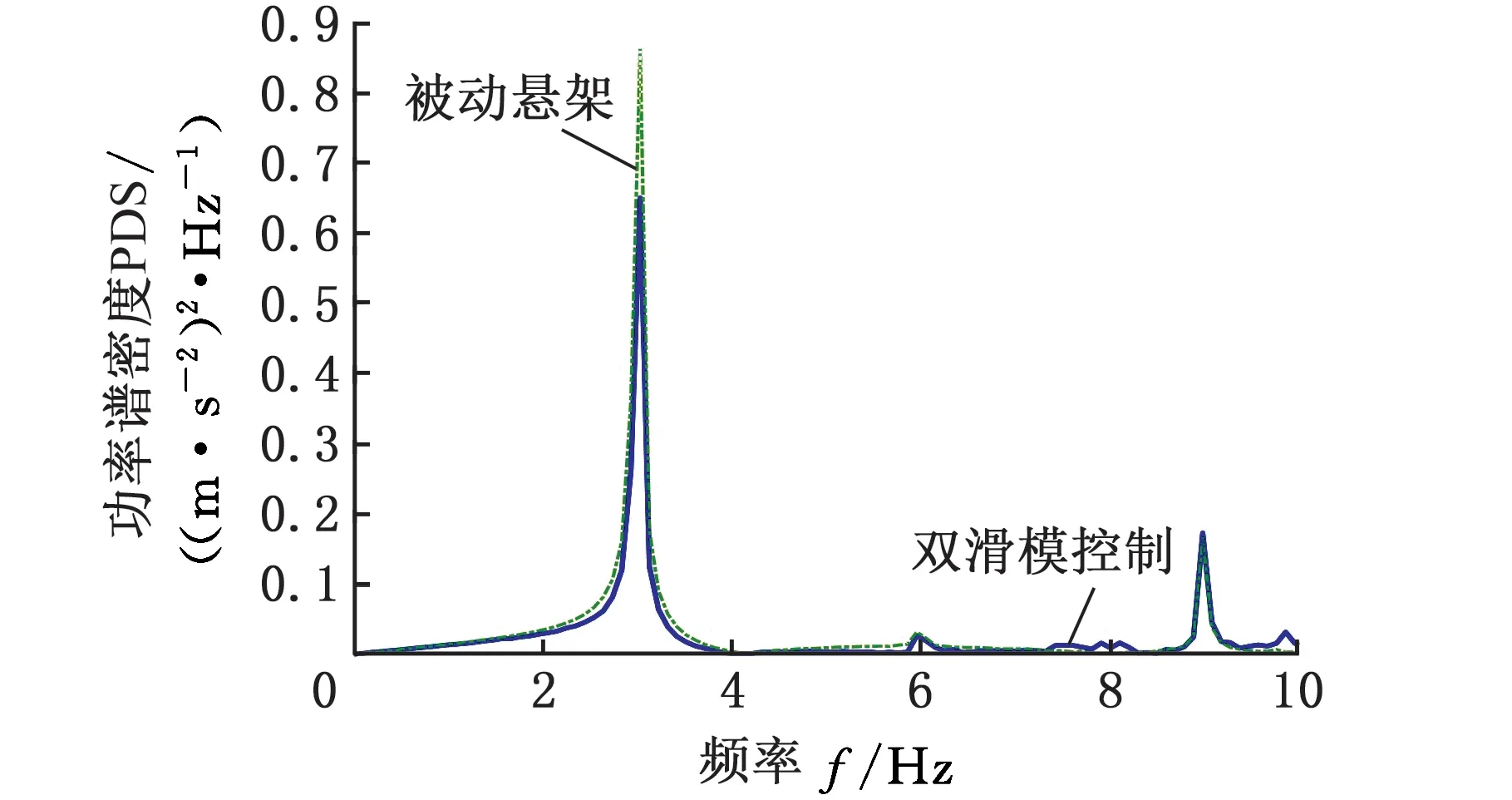
簧载质量加速度、悬架动挠度、轮胎动载荷是评价车辆动态特性的重要指标。簧载质量加速度响应、悬架动挠度响应、轮胎动载荷响应对比分别如图7、图8、图9所示,其均方根值如表3所示。
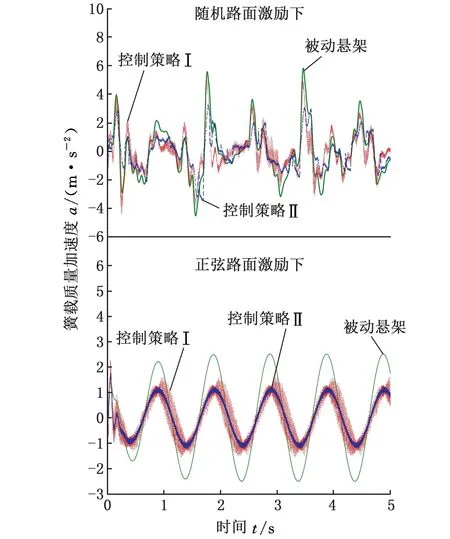
图7 簧载质量加速度响应Fig.7 Sprung mass acceleration response
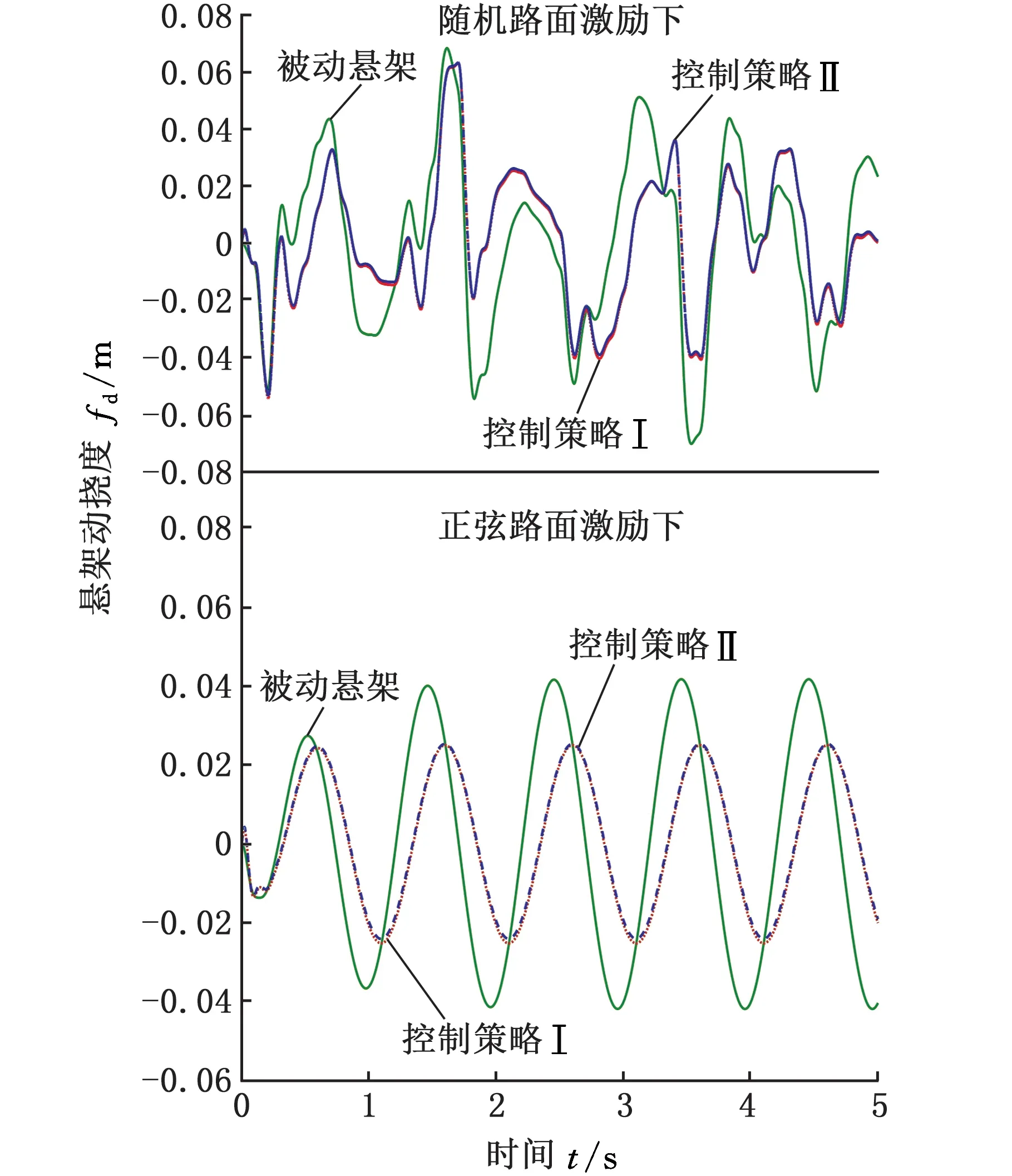
图8 悬架动挠度响应Fig.8 Suspension dynamic deflection response
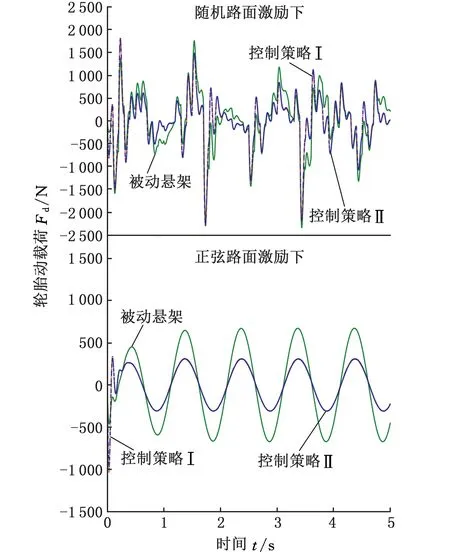
图9 轮胎动载荷响应Fig.9 Tire dynamic load response
簧载质量加速度(m/s2)悬架动挠度(m)轮胎动载荷(N)随机路面被动2.2560.030630.73 控制策略Ⅰ1.6740.019480.89控制策略Ⅱ1.4890.019479.13正弦路面被动1.6840.028451.11控制策略Ⅰ0.8310.017290.10控制策略Ⅱ0.7370.017289.09
由图7~图9、表3仿真结果可知,在随机路面输入下,双滑模控制策略相比于控制策略Ⅰ,簧载质量加速度下降11.05%,相比于被动悬架,簧载质量加速度下降34.00%。在正弦路面输入下,双滑模控制策略相比于控制策略Ⅰ,簧载质量加速度下降11.31%,相比于被动悬架,簧载质量加速度下降56.24%。两种控制策略下的悬架动挠度、轮胎动载荷曲线基本重合,但相比于被动悬架,在随机路面和正弦路面输入下,悬架动挠度均方根值分别减小36.67%和39.28%,轮胎动载荷均方根值分别减小23.90%和35.71%。
5 EHA主动悬架台架试验分析
为了验证EHA主动悬架的动力学模型及控制算法的正确性和有效性,对EHA主动悬架进行台架试验。
5.1 试验方案
EHA主动悬架振动试验系统如图10所示。该系统主要由电磁振动台、上下横梁、螺旋弹簧、导向机构、滑块导轨支撑机构、DSP控制器、电机驱动电路、数据采集与处理系统等组成。其中,在上横梁加载配重块模拟簧载质量,EHA、液压缸、下横梁模拟非簧载质量,并在上横梁处安装加速度传感器用以测量簧载质量加速度。

图10 EHA主动悬架台架试验系统Fig.10 The EHA active suspensions bench test system
试验中采用东华测试公司生产的DH186型加速度传感器对簧载质量加速度进行采集。以幅值为30 mm、频率为3 Hz的正弦激励和随机激励作为路面谱输入,测试双滑模控制策略下的EHA主动悬架控制效果,并与被动悬架控制效果相比较。
5.2 试验结果
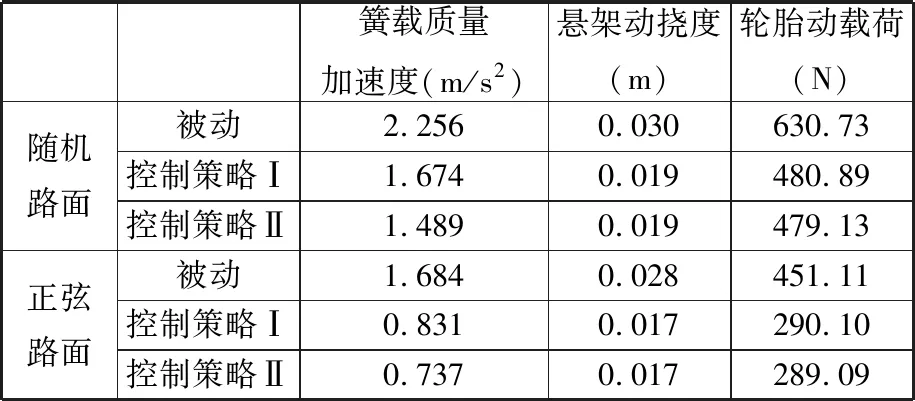
由于试验条件限制,仅采样簧载质量加速度作对比,分别进行时域与频域分析,试验结果如图11、图12与表4所示。
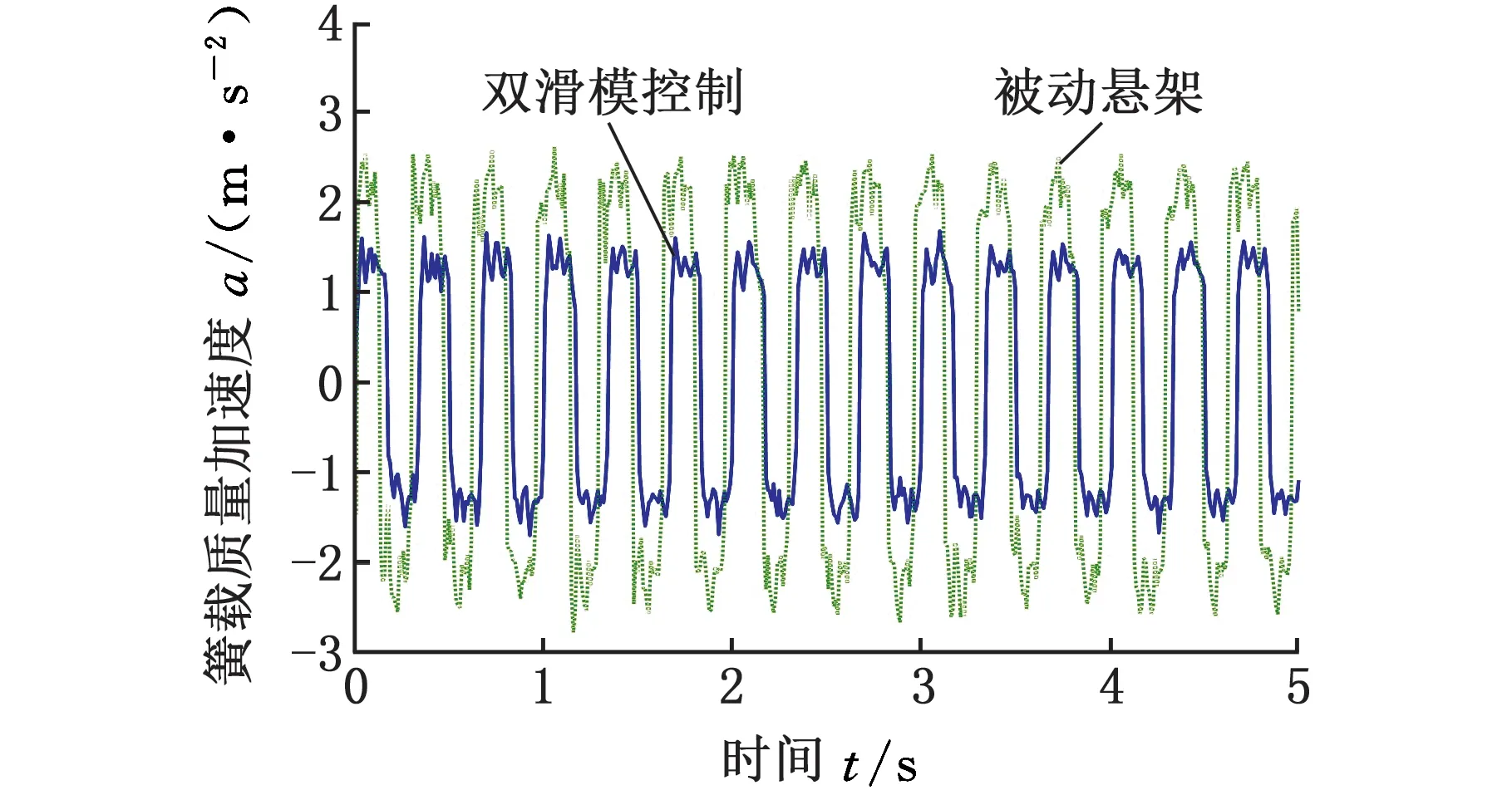
(a)3 Hz簧载质量加速度响应
(b)随机路谱下簧载质量加速度响应图11 不同路面输入时域响应Fig.11 Input time domain response of different pavement
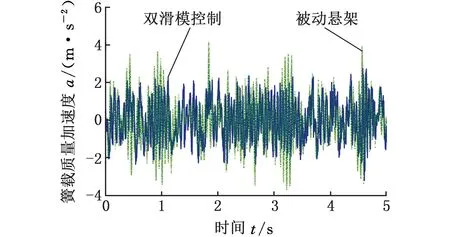
(a)3 Hz簧载质量加速度功率谱密度
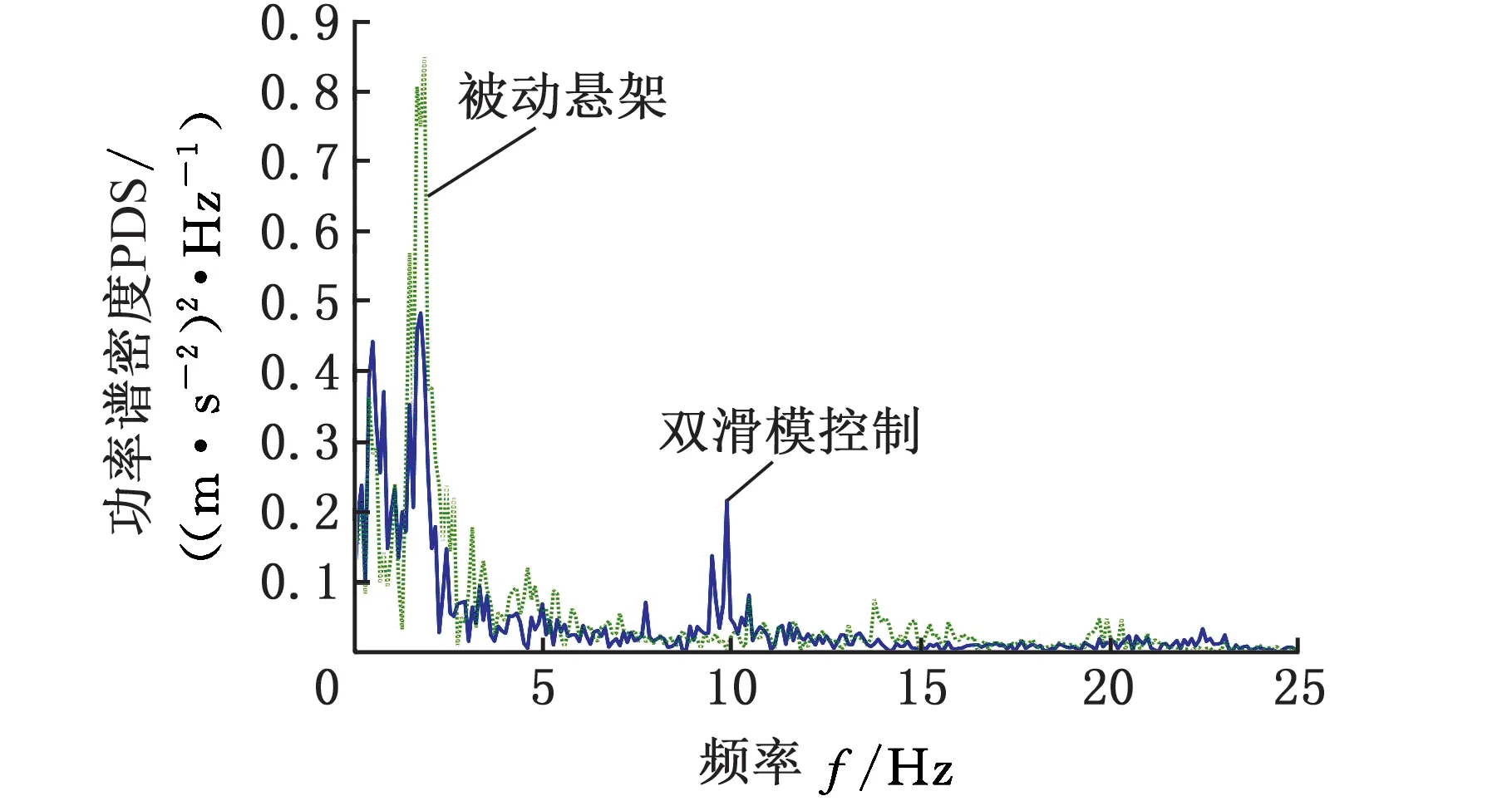
(b)随机路谱簧载质量加速度功率谱密度图12 不同路面输入下频域响应Fig.12 Input lower frequency response of different pavement
由图11与表4可知,采用双滑模控制策略的EHA主动悬架在正弦路面激励下,簧载质量加速度均方根值下降37.86%;在随机路谱输入下,簧载质量加速度均方根值下降31.07%,试验结果与理论分析基本一致。这验证了双滑模控制策略的有效性,说明双滑模控制策略能够有效减小簧载质量加速度,提高悬架的动态特性。

表4 簧载质量加速度均方根值
由图12可知,在不同频率下双滑模控制策略均能有效降低簧载质量加速度,自适应性好,并且在低频区域能防止车身共振,提高驾驶舒适性,降低悬架使用损耗,但在高频区域,由于指数趋近律只能消除弱抖振,EHA主动悬架系统簧载质量加速度接近于被动悬架,没有得到良好控制,甚至还有一定程度的恶化。
6 结论
提出了一种EHA主动悬架双滑模控制策略。在建立EHA主动悬架数学模型的基础上,采用模型参考的外环滑模控制器和内环电机滑模控制器,对系统实际输出主动力进行控制。通过MATLAB/Simlink对双滑模控制策略下的EHA主动悬架进行仿真分析,并开展了台架试验。试验结果验证了模型与控制策略的正确性与有效性,双滑模控制策略降低了输出主动力的脉动,使电机输出实际主动力能良好跟踪理想主动力,表明双滑模控制策略能有效改善悬架动态特性,降低悬架使用损耗。
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年1期)2017-05-17
北京航空航天大学学报(2016年7期)2016-11-16
电子制作(2016年1期)2016-11-07
北京汽车(2016年6期)2016-10-13
北京航空航天大学学报(2016年4期)2016-02-27
