
一种多特征融合的高分辨率遥感图像道路提取算法
2019-03-22 01:12:50王钰何红艳谭伟齐文雯
遥感信息 2019年1期
王钰,何红艳,谭伟,齐文雯
(1.北京空间机电研究所,北京 100094;2.先进光学遥感技术北京市重点实验室,北京 100094)
0 引言
道路信息作为基础地理信息的重要组成部分,在城市规划、车辆导航、自动化驾驶等方面具有重要的作用。遥感技术的快速发展,使得遥感图像的分辨率不断提高,同时越来越多的中、高分辨率遥感数据可以免费获取,数据源已经不是制约道路信息提取的关键因素。利用遥感图像提取道路信息通常依据人工目视判读,自动化程度和提取速度方面效率较低,且容易出现错误。因此,研究一种自动的道路提取算法具有非常重要的意义[1]。
目前国内外研究者利用遥感图像提取道路信息已经取得一定的研究成果。例如,傅罡等利用一种改进的圆投影匹配追踪算法,在山区曲折的实验场景下,取得了较为理想的实验结果[2];Shi等提出一种改进的形态学空间滤波算法,利用该算法对图像中的线性目标进行增强,然后利用一种简单的阈值方式,从而快速有效地提取道路信息,对于复杂的城市道路,该类算法存在一定的不足[3]。上述方法均从像元级的角度出发,并没有深入挖掘同类目标间的统计关系,对于上下文信息简单的郊区道路能够得到一定的实验结果,但对于道路情景、同物异谱复杂的区域容易产生椒盐与空洞现象[4]。面向对象的道路提取算法有效解决了这一问题,其以对象分割识别单元,从而有效改善了空洞现象,例如Huang等利用一种多尺度分割手段,分别提取图像的圆度、长宽比等特征,然后利用一种机器学习分类器,有效识别了场景较为复杂的道路网络[5]。但是,该类方法仍然缺乏对道路这一对象的深层次特征挖掘,对于环形等复杂形状道路,使用长宽比等形状特征难以描述,甚至有可能对光谱特征造成的一定干扰,从而导致提取结果精度较低。同时,在利用遥感图像进行多维度特征组合提取时,容易产生Huge现象,且大大增加了内存开销,影响了提取的运行效率[6]。
对现有利用高分辨率遥感图像进行道路提取方法分析可知,现有算法不足之处在于:1)没有深入挖掘图像中道路的深层特征;2)多特征融合缺乏有效的增强手段。本文从这两个角度出发,设计了一种有效的高分辨率遥感图像多特征融合的道路提取算法,该算法能够提取一种描述道路对象更为准确的空间特征,并引入了一种更为有效的多特征融合算法,从而提高道路信息的提取精度。
1 研究方法
本文算法的技术流程如1图所示,其主要包括:首先以多尺度分割算法为基础,完成对图像的对象描述;再利用本文构建的新的空间特征,实现道路对象的空间特征提取;之后利用多特征融合的方式,将对象级光谱特征与空间特征进行有效融合,并利用一种小样本、高效的机器学习分类器对道路网络进行初始提取;最后利用本文的形状特征,对初始道路网络进行有效优化,得到最终的道路网络。
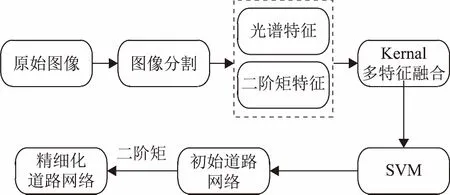
图1 本文算法技术流程
1.1 道路特征提取
对于高分辨率遥感图像,存在着同类地物光谱间差异较大,而不同类地物光谱间差异较少,仅仅依靠光谱特征进行地物识别准确性较低。因此,空间特征的辅助加入,能够有效提高识别精度,如Chen等针对依靠光谱特征难以从图像中提取大棚信息,通过融合灰度共生矩阵等纹理特征,有效识别出了大范围的大棚覆盖区域[7]。但该类方法是从像元的角度出发,对于高分辨率遥感图像难以有效的表达,使得椒盐现象严重,而面向对象的图像分析方法能够有效克服这一缺点。对象的形成通常需要图像分割、聚类等预处理手段,分割尺度的最优选择是对象形成的关键,为了提高算法的自动化程度与效率,本文以过分割作为对象形成方法,不需要考虑最优尺度,该类方法能够有效保持对象的匀质性,且提高了算法的效率。本文采用的分割算法为多尺度分割算法,目前已经在商业软件eCognition中得到了很好的应用。
高分辨率遥感图像上的道路网络,普遍呈现狭长的形状特征,研究者提取了经典的长宽比、填充度等线性形状特征,将其应用到道路提取上得到了较好的实验效果。但对于复杂的道路形状,如环形道路等,该类形状特征则缺乏有力的形状描述。因此,研究一种适合描述复杂形状的线性特征非常必要。本文从该角度出发,基于二阶矩设计了一种更为有效的形状描述算子——二阶矩形状特征,该特征的计算公式为:
(1)
(2)
式中:i表示分割后第i个对象;n表示分割后形成的对象个数;xm与ym表示第i个对象的质心位置;xi与yi表示第i个对象内任意像元;lengthi表示某一对象内第i个像元与质心的欧式距离;SM表示二阶矩特征。
为了说明本文的二阶矩特征作为道路特征的有效性,本文分别提取了长宽比特征和二阶矩特征并进行对比,实验效果如图2所示。
从图2可以看出,本文构建的二阶矩特征对于线性形状描述更为有效,从而在特征层次上大大提升了道路与其他地物的区分度,为下一步识别道路提供可靠的前提。
本文以图像分割为基础,提取图像的光谱特征,分别计算各个对象的像元灰度均值,以该值作为该对象的光谱特征,从而实现对象级光谱特征提取。

图2 不同形状特征对比
1.2 基于Kernal集成的多特征融合
空间特征的有效融合能够改善同谱异物现象,但是随着空间特征维度的增加,高维特征有可能会产生Huge现象,对于地物的识别并不会有效提升[8]。目前常用的道路提取算法中,特征的融合方式通常采用矢量叠加等[9],尽管该类方法是一种有效的特征融合方式,能够很好的保持各类特征的信息,但是高维的空间特征可能会影响光谱特征,从而降低实验精度。张春森等提出了一种概率融合的多特征融合方法[10],该类方法分别从空间和光谱两个角度出发,以特征权重的方式进行特征融合,得到了有效的实验结果,但是其特征权重的获取,需要人工获取样本,影响了算法的自动化程度。对于构建的空间特征,如何有效地与光谱特征进行融合,从而有效减少特征维度,提高算法精度与效率是一个亟待解决的问题[11]。Fauvel等设计了一种Kernal集成的多特征融合算法[12],将构建的形态学空间特征与光谱特征,以Kernal核函数的方式进行有效的融合,在高分辨率遥感图像分类中得到了很好的应用。基于Kernal集成的多特征融合能够有效保持特征的原始信息,充分利用各个特征的优点。因此,本文采用Kernal集成将二阶矩空间特征与光谱特征进行有效的融合。基于Kernal的多特征融合,其主要公式为:
k=u1k1+u2k2
(3)
式中:k1表示光谱特征核函数;k2表示二阶矩特征核函数;k表示新合成的核函数;u1和u2表示不同特征的合成权重。
利用公式(3)将二阶矩空间特征与光谱特征进行有效的融合,能够同时利用空间特征和光谱特征的优点,从而提高从高分辨率遥感图像中提取道路的精度。
1.3 基于SVM的道路网络初提取
利用1.2节中构建的Kernal核函数,本文选择一种经典的机器学习分类器—支持向量机(surpport vector machine,SVM)进行样本训练预测等[13-14]。SVM在小样本的条件下,仍然能够有效地进行分类预测,且具有一定的抗噪性。在样本有限的情况下,适合本文的道路提取算法。基于SVM的道路网络初提取步骤如下:
步骤1:利用Kernal将二阶矩空间特征与光谱特征进行融合,构建出新的Kernal核函数;
步骤2:以上一步骤中的Kernal核函数作为SVM新的核函数,完成样本训练;
步骤3:利用训练出的模型,完成道路网络的初始提取。
其中,对于样本选择,本文采用二分类的方式完成,即只判定道路与非道路类。两类的样本个数分别为各自真实分布的5%。SVM分类器中核心参数C、g等通过五倍交叉验证完成获取最优值。
利用图像分割形成的标记矩阵,以众数规则方式完成道路网络的对象级提取,其主要思想是通过判定该对象类道路像元与非道路像元的个数比较,从而完成道路的对象级提取,改善了椒盐与空洞现象。
1.4 基于二阶矩的道路网络精细化
利用SVM提取的初始道路网络,不可避免的存在非道路区域,需要将这些区域进行去除,从而保存道路网络的唯一性与完整性。传统的方法通常使用面积阈值、长宽比等方式进行去除,且需要多个形状特征进行组合,为了更加有效自动化去除非道路区域,本文利用图像分割后得到二阶矩形状特征进行去除。再次使用二阶矩形状特征的好处在于:1)无需重新计算二阶矩特征,提高了算法的效率;2)能够更为有效地去除非道路区域,提高了算法的精度。
2 实验与分析
为了验证本文算法的有效性,选择不同卫星遥感器、不同成像分辨率、不同场景的高分辨遥感图像作为数据源进行实验,并且通过不同算法进行对比,对比算法的选择主要考虑以下2个方面,1)选取不同的特征融合算法进行对比,本文选择Huang等提出的常用的矢量叠加进行对比,其中经过参数调优,设置为:分割尺度分别为10、20、30、40,人工选取5%真实训练样本;2) 选取现有较优算法进行对比,如Miao等提出的算法[15],其从道路边缘的角度出发,结合改进长宽比、面积阈值去除非道路得到精化道路网络,其中参数设定,经过多次实验确定最优参数为二值化阈值0.001、长宽比过滤阈值15、面积阈值200。对道路提取结果从定性和定量两个角度进行评价,从定量的角度出发[16],利用完整率、正确率、检测质量3个指标评价不同算法的精度。
2.1 实验1 IKONOS遥感图像
实验1数据选取澳大利亚Hobart地区的Ikonos遥感图像,可见光多光谱的成像分辨率为4 m,全色波段成像分辨率为1 m,选择融合后空间分辨率1 m的图像进行实验,图像大小为800像素×1 000像素,实验图像及真实道路网络分布如图3所示。

图3 实验1图像及真实道路网络
实验1不同算法对比实验结果如图4所示。从图4可以看出,采用本文算法对于道路的边缘保持的更加完整,而采用Miao等提出的算法提取的道路网络,尽管边缘保持较好,但是仍然有部分的道路网络没有提取出来,这是由于最优参数难以确定,且以单阈值的方式来判定全局存在不足之处。采用Huang等提出的算法提取的道路,对于边缘部分难以保持,且对于同谱异物区域得不到有效的实验结果。本文算法总体效果最好,对于边缘部分与其他区域均得到的实验结果相对较优,完整识别出了道路网络,而Miao等提出的算法漏提取较多。为了进一步说明本文算法的有效性,选取图中小区域进行局部对比,如图5所示。Huang等提出的算法提取的道路,在边缘出现粘合的现象且道路网络不够准确。Miao等提出的算法提取的道路容易出现中断的情况,道路网络不够完整。本文提出的算法能够较好地保持道路网络形状。

图4 实验1不同算法对比实验结果

图5 实验1不同算法局部对比
2.2 实验2 QuickBird遥感图像
为了验证不同分辨率和不同场景下,算法的可靠性,实验2数据选取了美国Texas地区的QuickBird遥感图像,可见光多光谱成像分辨率为2.16 m,波段组合为RGB真彩色图像,图像大小为805像素×650像素。实验图像及真实道路网络分布如图6所示。

图6 实验2图像及真实道路网络
实验2不同算法对比实验结果如图7所示,从图7可以看出,在复杂道路环境场景下,采用本文的算法仍然能够完整地提取出道路网络,边缘保持完整。采用Huang等提出的算法提取的道路,对于边缘部分难以保持,相似地物出现粘合现象,受同谱异物的影响存在着错误提取。采用Miao等提出的算法提取的道路虽然能够提取出道路网络,但存在一定的漏提取且对细节特征道路的隔离带进行了过渡平滑。本文算法得到道路提取效果最佳,道路网络完整,边缘清晰。为了进一步说明本文算法的可靠性,选取图中小区域进行局部对比,如图8所示。Huang等提出的算法提取的道路,由于同谱异物的影响,提取出较多的非道路区域。Miao等提出的算法提取的道路出现较多的盐噪声,道路网络不够完整。本文提出的算法能够较好地保持道路形状,盐噪声较少。
利用不同卫星遥感器、不同成像分辨率、不同场景的高分辨遥感图像提取道路信息,从定性的角度来看,在目视效果上本文的算法均优于其他算法(如图4和图7所示),提取道路网络更为完善,存在较少的漏提取和盐噪声。表1给出两次实验利用完整率、正确率、检测质量3个指标评价不同算法精度的结果。定量分析表明,本文的算法在3个指标方面均优于其他算法,再次验证了本文算法的有效性。

图7 实验2不同算法对比实验结果

图8 实验2不同算法局部对比

算法实验1实验2完整率正确率检测质量完整率正确率检测质量文献[5]0.906 00.551 50.531 50.893 00.582 00.597 4文献[15]0.667 90.714 00.553 60.712 50.731 80.614 2本文算法0.917 00.724 40.679 80.922 70.752 00.703 5
3 结束语
本文构建了一种新的形状特征,有效提高了道路网络的提取精度,引入一种新的多特征融合算法,有效利用了光谱与空间特征,改善了同谱异物问题,提高了道路提取的总体效果。但本文算法仍然需要人工选取正负训练样本,效率方面仍然存在一定的不足之处。有待进一步研究一种自动化的样本获取方法,有效提高算法的自动化程度和运算效率。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:58
当代陕西(2022年4期)2022-04-19 12:08:50
小猕猴学习画刊(2022年3期)2022-03-28 16:33:01
青年歌声(2020年12期)2020-12-23 06:30:00
应用数学(2020年2期)2020-06-24 06:02:46
数学物理学报(2018年6期)2019-01-28 08:58:02
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
Acta Mathematica Scientia(English Series)(2018年6期)2018-03-01 03:13:44
中国光学(2015年5期)2015-12-09 09:00:28
读写算·高年级(2015年1期)2015-07-25 02:22:00
