
一种新型四轴飞行器姿态角控制方法与仿真
2019-03-20 13:36:16孙春虎方愿捷李昊东
巢湖学院学报 2019年6期
孙春虎 方愿捷 王 静 李昊东
(巢湖学院 电子工程学院,安徽 巢湖 238000)
0 引言
四轴飞行器姿态角系统的数学模型是个非线性、强耦合、多变量的欠驱动系统。四轴飞行器控制常采用卡尔曼滤波加单级PID控制,但是存在卡尔曼滤波噪声偏大,滞后略微严重,单级PID难操作,打舵响应慢,跟随效应差的缺点。为此,文章在研究四轴飞行器姿态角数学模型的基础上,提出了一种新型姿态角控制方法,并以滚转角、偏航角控制为例,对新型控制系统进行了Simulink仿真,仿真结果验证了控制方法的可行性,具有一定的参考和应用价值[1-3]。
1 四轴飞行器姿态角数学模型分析
四轴飞行器姿态角的数学模型是个多变量、非线性、强耦合的复杂系统。依据文献[4],利用拉格朗日方程可求得姿态角的一般简化数学模型如公式(1)所示[5]。

式中,φ、θ、ψ 分别表示滚转角、俯仰角、偏航角;IX、IY、IZ分别表示绕X轴、Y轴、Z轴的转动惯性常量;l表示旋翼中心到机体中心的距离;U2、U3、U4分别表示滚转通道控制输入量、俯仰通道控制输入量、偏航通道控制输入量。
应用小扰动原理将非线性方程线性化处理,并忽略附加小扰动后,公式(1)可简化为[6-7]
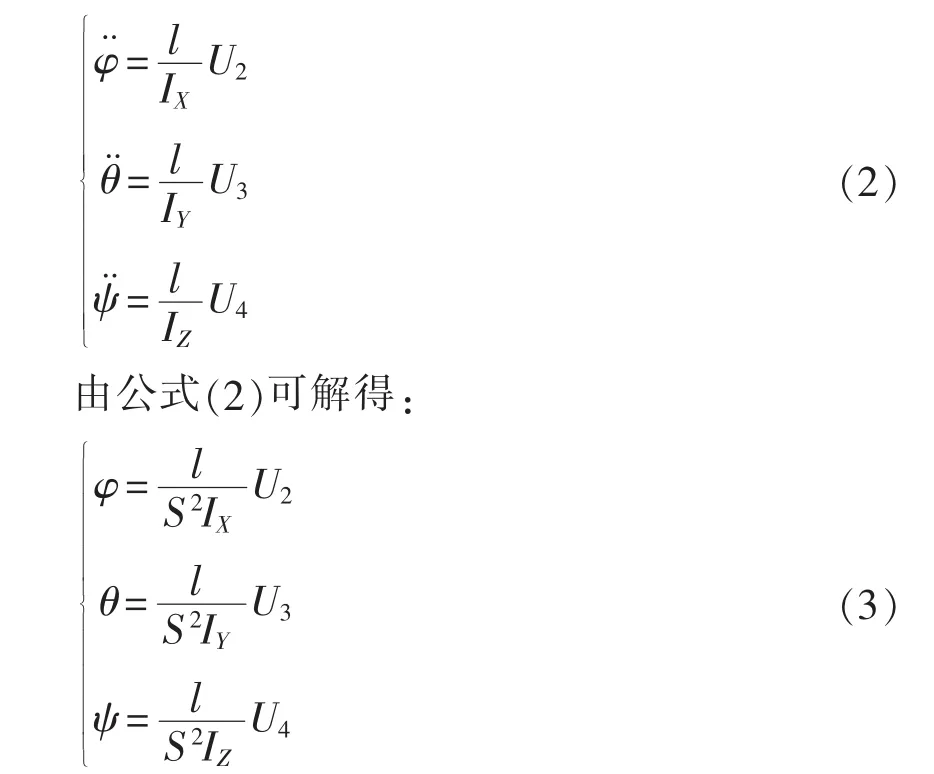
从公式(3)可以看出,滚转角φ输出与控制量U2有关;俯仰角θ输出与控制量U3有关;偏航角ψ输出与控制量U4有关。
2 四轴飞行器姿态角控制策略研究
由于滚转角通道、俯仰角通道、偏航角通道控制对象数学模型类似,下面只以偏航角ψ控制为例,对偏航角ψ控制系统进行分析和设计。由公式(3)可知,偏航角ψ输出对输入控制量U4的传递函数为二阶积分环节。因此,可以将偏航角ψ控制系统校正成典型Ⅰ型系统,再利用常规PID调节器即可实现偏航角控制。偏航通道控制系统如图1所示,它主要由外环PID调节器部分和内环对象校正部分组成[8-9]。

图1 偏航通道控制系统
由图1可求得:内环对象校正系统闭环传递函数变为

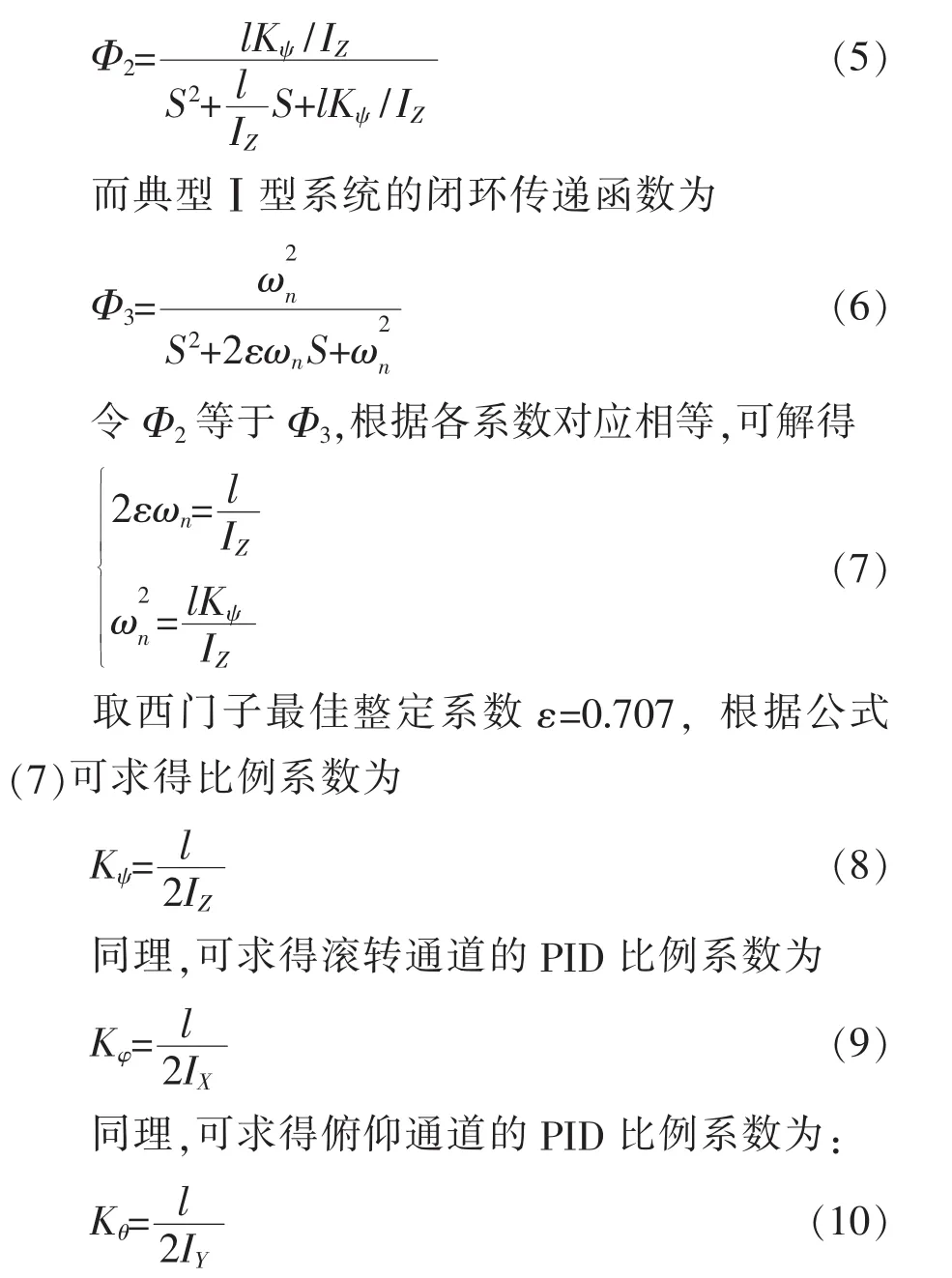
由公式(4)可以看出,此时控制对象为典型控制对象,外环PID控制只需采用比例控制器,无需采用积分和微分控制。假设比例控制器比例系数为Kψ,则图1偏航通道控制系统的闭环传递函数可表示为
3 四轴飞行器姿态角控制系统仿真
笔者在实验室所设计的四轴飞行器测得的参数如表1所示。

表1 飞行器参数表
将表 1 中数据代入公式(8)、(9)、(10)可解得,比例系数 Kφ=Kθ=53.13,Kψ=2.36,滚转与俯仰通道的传递函数均为106.26/S2,偏航通道的传递函数为4.72/S2。
3.1 新型控制策略控制效果仿真
3.1.1 滚转角通道仿真
根据新型滚转角控制策略,所搭建的滚转角通道Simulink仿真模型[10-11]如图2所示。

图2 滚转角通道仿真模型
图中常量1为滚转角给定值,单位弧度;K表示滚转通道比例系数,值为53.13;106.26/S2为滚转通道对象传递函数;du/dt为微分环节;内环为对象校正闭环系统;外环为比例控制闭环系统;仿真时间为1 s。
滚转角通道仿真结果如图3所示。

图3 滚转角通道仿真结果
滚转角给定1 rad时,滚转通道输出能稳定在1 rad输出;系统能在0.1 s的时间内实现系统的快速稳定;超调量为2.3%,超调量小;稳态误差小,精度高。
3.1.2 俯仰角通道仿真
根据新型俯仰角控制策略,所搭建的俯仰角通道Simulink仿真模型[10-11]如图4所示。

图4 俯仰角通道仿真模型
图中常量0.5为俯仰角给定值,单位弧度;K表示俯仰通道比例系数,值为53.13;106.26/S2为俯仰通道对象传递函数;du/dt为微分环节;内环为对象校正闭环系统;外环为比例控制闭环系统;仿真时间为1 s。
俯仰角通道仿真结果如图5所示。

图5 俯仰角通道仿真结果
俯仰角给定0.5 rad时,滚转通道输出能稳定在0.5 rad输出;系统能在0.1 s的时间内实现系统的快速稳定;超调量为1%,超调量小;稳态误差小,精度高。
3.1.3 偏航角通道仿真
根据新型偏航角控制策略,所搭建的偏航角通道Simulink仿真模型如图6所示。

图6 偏航角通道仿真模型
偏航角通道的仿真结果如图7所示。

图7 偏航角通道仿真结果
偏航角给定1 rad时,偏航通道输出能稳定在1 rad输出;系统能在1 s的时间内实现系统的快速稳定;超调量为4.2%,超调量小;稳态误差小,精度高。
3.2 新型控制策略抗干扰效果仿真
3.2.1 滚转角通道仿真
采用新型控制策略,外加干扰时,滚转角通道抗干扰仿真模型如图8所示。
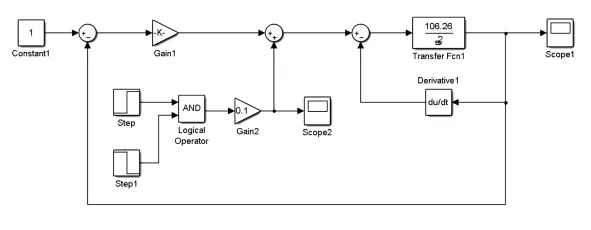
图8 滚转角通道抗干扰仿真模型
图中step模块、step1模块为阶跃信号;AND模块为与门;Gain1、Gain2 为比例模块;step、step1经过AND门后得到一脉冲信号;脉冲信号经过Gain2模块衰减到0.1倍,得到一干扰信号;干扰信号在5~8 s期间起作用,幅值为0.1 rad;其他时间段干扰信号不起作用,幅值为0 rad;滚转通道对象传递函数不变,仿真时间为12 s。
根据仿真模型,所得滚转角通道抗干扰仿真结果如图9所示。
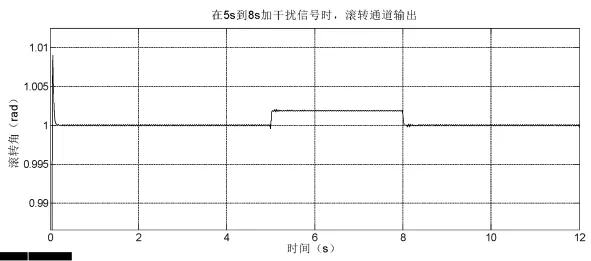
图9 滚转角通道抗干扰仿真结果
从滚转角通道抗干扰仿真结果可以看出,当在5 s时刻加入0.1 rad干扰时,滚转角在6 s时输出稳定不变的1.002 rad,系统仍然稳定,稳态误差为0.2%,抗干扰能力很好;当在8 s时刻撤除干扰时,滚转角又能恢复稳定,抗干扰性恢复能力很好。
3.2.2 俯仰角通道仿真
采用新型控制策略,外加干扰时,俯仰角通道抗干扰仿真模型如图10所示。

图10 俯仰角通道抗干扰仿真模型
图中step模块、step1模块为阶跃信号;AND模块为与门;Gain1、Gain2 为比例模块;step、step1经过AND门后得到一脉冲信号;脉冲信号经过Gain2模块衰减到0.1倍,得到一干扰信号;干扰信号在4~7 s期间起作用,幅值为0.1 rad;其他时间段干扰信号不起作用,幅值为0 rad;俯仰通道对象传递函数不变,仿真时间为10 s。
所得俯仰角通道抗干扰仿真结果如图11所示。

图11 俯仰角通道抗干扰仿真结果
从俯仰角通道抗干扰仿真结果可以看出,当在4 s时刻加入0.1 rad干扰时,滚转角在5 s时输出稳定不变的0.502 rad,系统仍然稳定,稳态误差为0.4%,抗干扰能力很好;当在7 s时刻撤除干扰时,俯仰角又能恢复稳定,抗干扰性恢复能力很好。
3.2.3 偏航角通道仿真
同理,采用新型控制策略,外加干扰时,所得偏航角通道抗干扰仿真模型如图12所示。偏航通道对象传递函数不变,仿真时间为12 s。
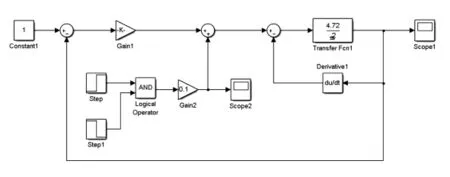
图12 偏航角通道抗干扰仿真模型
根据仿真模型,所得偏航角通道抗干扰仿真结果如图13所示。
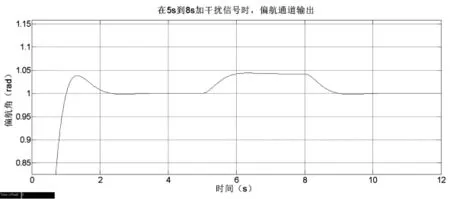
图13 偏航角通道仿真模型
从偏航角通道抗干扰仿真结果可以看出,当在5 s时刻加入0.1 rad干扰时,偏航角在6 s时输出稳定不变的1.043 rad,系统仍然稳定,稳态误差为4.3%,抗干扰能力较好;8 s时刻撤除干扰,9 s时刻之后,偏航角又能恢复稳定,抗干扰性恢复能力较好。
3.3 新型控制策略在控制对象发生变化时控制效果仿真
3.3.1 滚转角通道仿真
当滚转角通道控制对象变化时,新型控制策略控制效果仿真模型如图14所示。
控制对象变化前,滚转角通道传递函数为106.26/S2,控制对象变化后,滚转角通道传递函数为80/S2,仿真时间为20 s。

图14 滚转角通道控制对象变化时仿真模型
图中step2模块、step3模块、AND模块、NOT模块组成了一脉冲控制信号;脉冲控制信号在13 s到17 s时间段输出低电平0;脉冲控制信号在其他时间段输出高电平1;当脉冲控制信号为1时,Switch模块选中106.26/S2为控制对象;当脉冲控制信号为0时,Switch模块选中80/S2为控制对象。
根据仿真模型,所得滚转角通道对象变化时仿真结果如图15所示。

图15 滚转角通道控制对象变化时仿真结果
根据滚转角通道控制对象变化时仿真结果可以看出:在13 s时刻当控制对象由106.26/S2变为80/S2时,系统开始自动调节,14 s时系统稳定,输出0.9999 rad,稳态误差为0.01%;在17 s时刻当控制对象由80/S2恢复为106.26/S2时,系统开始自动调节,18 s时系统稳定,输出1.0001 rad,稳态误差也为0.01%。
3.3.2 俯仰角通道仿真
当俯仰角通道控制对象变化时,新型控制策略控制效果仿真模型如图16所示。
控制对象变化前,俯仰角通道传递函数为106.26/S2,控制对象变化后,俯仰角通道传递函数为80/S2,仿真时间为20 s。
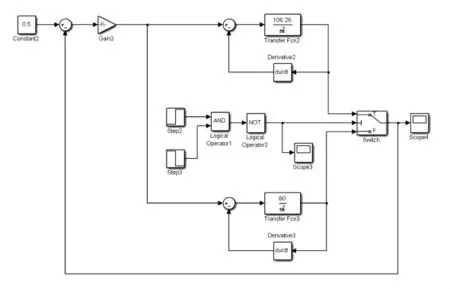
图16 俯仰角通道控制对象变化时仿真模型
图中step2模块、step3模块、AND模块、NOT模块组成了一脉冲控制信号;脉冲控制信号在12~16 s时间段输出低电平0;脉冲控制信号在其他时间段输出高电平1;当脉冲控制信号为1时,Switch模块选中106.26/S2为控制对象;当脉冲控制信号为0时,Switch模块选中80/S2为控制对象。
根据仿真模型,所得俯仰角通道对象变化时仿真结果如图17所示。
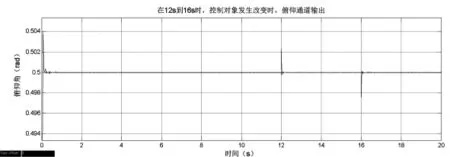
图17 俯仰角通道控制对象变化时仿真结果
根据俯仰角通道控制对象变化时仿真结果可以看出:在12 s时刻当控制对象由106.26/S2变为80/S2时,系统开始自动调节,13 s时系统稳定,输出0.4999 rad,稳态误差为0.02%;在16 s时刻当控制对象由80/S2恢复为106.26/S2时,系统开始自动调节,17 s时系统稳定,输出0.5001 rad,稳态误差也为0.02%。
3.3.3 偏航角通道仿真
当偏航角通道控制对象变化时,新型控制策略控制效果仿真模型如图18所示。
控制对象变化前,偏航角通道传递函数为4.72/S2,控制对象变化后,偏航角通道传递函数为3/S2,仿真时间为 20 s。

图18 偏航角通道仿真模型
根据仿真模型,所得偏航角通道对象变化时仿真结果如图19所示。

图19 偏航角通道仿真结果
如图,在13 s时刻当控制对象由4.72/S2变为3/S2时,系统开始自动调节,14 s时系统稳定,输出0.9999 rad,稳态误差为0.01%;在17 s时刻当控制对象由3/S2恢复为4.72/S2时,系统开始自动调节,18 s时系统稳定,输出0.9997 rad,稳态误差为0.03%。
4 结论
研究分析了四轴飞行器的姿态角数学模型,并得到了简化的数学模型。针对所得的姿态角数学模型,提出了一种四轴飞行器姿态角新型控制策略,最后对新型姿态角控制系统进行了Simulink仿真,仿真结果表明:所设计控制策略的正确性;能对俯仰角通道、滚转角通道和偏航角通道进行较好的控制。所设计的新型四轴飞行器控制系统具有一定的参考与应用价值。
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
煤气与热力(2021年4期)2021-06-09 06:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
测控技术(2018年7期)2018-12-09 08:58:46
解放军健康(2017年5期)2017-08-01 06:27:42
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
光学精密工程(2016年4期)2016-11-07 09:05:39
交通建设与管理(2015年13期)2015-03-20 15:18:48
