教你玩转模型直升机
2019-03-18 07:08
航空模型 2019年4期


CGM-Next模擬器操作界面
@Ll1113:新手训练时,怎样操纵模型直升机平稳降落?
杨培良:首先,油门曲线和螺距曲线一定要设定正确,具体可参考2019年第二期文章中关于油门曲线和螺距曲线如何配合的内容(油动和电动模型直升机的设定略有区别)。其次,操纵模型时,要匀速收小油门(螺距),使其在下降过程中保持转速稳定。最后,多多练习,熟能生巧。
李俊杰:对于模型直升机来说,起飞和降落是最考验飞行技术的。若想平稳降落,悬停是很重要的基本功。
对于刚入门的新手来说,如果模型直升机始终处于移动中,将很难做到平稳着陆,因此降落前消除模型直升机的移动是首要。操纵时,需把模型直升机悬停在一个离地较低的位置上,同时不断地进行修正,以保证其不会前后左右偏移。此时稍微收一点螺距就可以使模型较稳定地降落。
对于有一定基础的模友来说,若想更加精准地定点降落,就需用更加复杂的操作了。以F3C的1米圈中心定点着陆动作为例,操纵时首先保证模型直升机悬停在地面1米圈上方,然后通过缓慢地减小油门和不断地修正姿态让模型保持直线下降。因为接近地面会受到地效作用的影响,所以模型越接近地面,受到的干扰越大,这时就要求操纵手以更小的舵量和更细腻的修正动作进行操纵。操纵模型直升机平稳降落的重点是下降过程中机身不能有较大偏移,降低高度时需保持较漫的匀速姿态。
王周海:新手训练前,可配合模拟器,加深对动作的理解。推荐使用德国CGM-Next模拟软件,其手感接近真实效果。如果在模拟器上可以平稳起降,那么在实际飞行时就更容易上手,也不会那么紧张了。另外,操纵模型降落时要判断好模型的高度和水平位置,缓慢收螺距降落。
戴琛:平稳降落不仅需要建立在熟练的悬停基本功基础上,还要考虑地面效应带来的影响。模型直升机在降落过程中会经过两个阶段,即无地效阶段和有地效阶段。以700级模型直升机为例,一般高度在1米以上时不会有明显的地效影响,此阶段只需稳定模型的姿态,缓慢收油门/螺距即可。随着模型下降至1米以下,地效作用逐渐增强,此时机身会处于自身旋翼气流及地效叠加的涡流中,很容易出现姿态不稳定的状况,因此必须在收油门/螺距的同时,尽可能维持模型的姿态稳定。最后,模型在落地瞬间要果断收油,否则会因地效强烈而产生漂移。

不同级别的模型直升机
@梁童鞋一亩八:刚开始入门,如何选择一款合适的遥控模型直升机?
李俊杰:挑选模型直升机前,建议先从模拟器入手,待有一定的条件反射和控制能力后再考虑用何种机型实际操作。
常见的中小级别模型,因为售价和配件都相对便宜,所以深受初学者喜欢。不过,若是从性能角度看,大级别机型往往有更好的抗风能力和稳定性,会让飞行变得相对容易。此外,目前市场上模型直升机品牌繁多,国产机型和进口机型都有,且质量差异较大。挑选时应选择精度高、性能好的机型,以使飞行操纵更容易。
总之,挑选模型要从自身情况出发,根据自己的水平选择一款适合的机型才是最重要的。
王周海:刚开始入门时,应尽量选择一款耐摔、飞行寿命长、配件容易获得且组装维修方便的机型。推荐新手选择主旋翼尺寸为325-360毫米的模型自升机。
戴琛:初学者入门选择模型自尹机时可咨询一些有经验的模友。在经济条件允许的情况下,尽可能选择配件供应充裕、性价比较高的主流品牌套材。此外,目前电动模型直升机是主流机型,建议选择大小适中的500-600级模型进行入门训练。此级别的机型训}练成本相对较低,抗风性也能满足日常使用需求。

在模拟器中练习自旋翻动作
@HuHuC9:模型直升机自旋翻动作怎么练习?
杨培良:正确白勺练习方法是按以下步骤,逐步掌握自旋翻动作:
(1)侧滚
侧滚动作要求操纵者熟练掌握机头向前、向后、向左、向右的左侧滚及右侧滚。练习侧滚时先从正飞进入、正飞改出,再练习倒飞和正倒飞交替侧滚。
(2)翻滚
前/后翻滚要求操纵者熟练掌握机头向前、向后、向左、向右的前翻滚及后翻滚。练习前/后翻滚应先从正飞进入、正飞改出,再练习倒飞和正倒飞交替前/后翻滚。
(3)自转
自转要求操纵者熟练掌握机头向左、向右、正飞、倒飞的匀速自转。练习自转应先从正飞开始,再练习倒飞和正倒飞交替自转。
(4)自旋翻
上述3个基本动作分别对应模型的X轴、丫轴和Z轴动作,熟练掌握后将它们连贯起来就能顺利地完成自旋翻动作了。日常练习时,建议不要直接练习自旋翻动作,而应该循序渐进,打好基础。
李俊杰:练习自旋翻动作有2个必须掌握的基本功:各方向的定点横滚和筋斗训}练以及正及环口倒飞自旋悬停。
熟练掌握上述基本功后,再分解练习自旋翻。练习时,先操纵模型从正飞翻到倒飞姿态,然后尾舵顺时针旋转90°;接着按照之前的翻转方向继续操纵模型翻滚180°;最后使尾舵再顺时针旋转90°。
练习后期,逐渐将模型翻滚和尾舵旋转的动作融会贯通,慢慢就能找到尾桨转速和翻滚速度的最佳配合方式,从而完美地飞出自旋翻动作。
王周海:自旋翻练习是一个比较漫长的过程,因为是一串连贯的动作同时进行,所以需要各动作间的精确配合。练习时,可先练会前、后、左、右4个方向的原地翻滚。待4个方向的翻滚练好后,再练习尾舵原地旋转90°-180°接原地翻滚的动作。经过长期的训练会发现,只要尾舵控制精确且连贯,模型翻滚的姿态离自旋翻动作就很接近了。
戴琛:自旋翻是3D花式飞行中的基础动作,也是一个看起来非常炫酷的动作。练习自旋翻要了解其原理和分解动作,不能简单追求所谓的手势动作。
自旋翻顾名思义就是模型直升机做“自旋”和“翻滚”的组合动作。练习时,首先操纵悬停的模型直升机朝任意方向做一个半滚或180°翻滚,然后操纵机身向任意方向旋转900。
接下来,做与第一次同方向的180°翻滚或半滚(若第一次向内侧翻滚,接下来同样向内侧翻滚),然后再操纵模型重复与第一次动作同方向的90°旋转(若第一次打左舵,接下来同样打左舵)。依此方式执行180°翻滚或半滚+转向,直到模型直升机回到最初始的悬停姿态,就完成了一个自旋翻动作。
练习自旋翻可从分解动作开始,逐步转为翻滚+转向的组合动作。通过反复练习,就能实现连续自旋翻的动作,最终达到熟赎东掌握定点自旋翻。

VBAR系列陀螺仪
@林大木:模型直升机连接电脑调试好了,十字盘已调平,但是把数据线拔下来以后,推杆升降又变得不平了,怎么解决?
李俊杰:这种情况要看陀螺仪的具体品牌与型号,不同的陀螺有不同的特性。以VBAR系列陀螺仪为例,这种情况属于正常现象,在调整模式下调好所有参数即可。该现象不会影响实际飞行。
王周海:应分两种情况分析,一种情况比较常见,就是陀螺仪在进行预补偿动作。此时出现升降杆不平属于正常现象。另一种情况则需先检查模型主要零件如连杆长度是否标准,然后重启遥控器和模型动力电进行自检。
戴琛:调试模型直升机时,陀螺仪与电脑断开连接即会产生修正作用,尤其在锁定模式下执行相应的AIL和ELE舵面操作时,遥控器的摇杆回中后倾斜盘不会立刻回中。这种状态在不同品牌的陀螺仪上表现各异,如果参数调整正确,该现象是正常的。另外,出现此类问题时,需要反复确认陀螺仪校准和参数调整是否正确,如果不正确则应严格按照说明书的步骤重新操作。
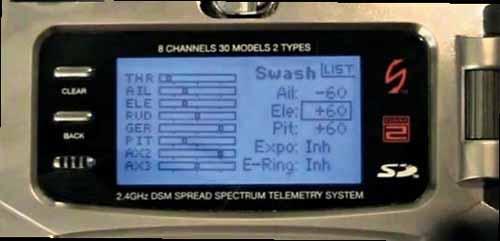
正确设置遥控器参数
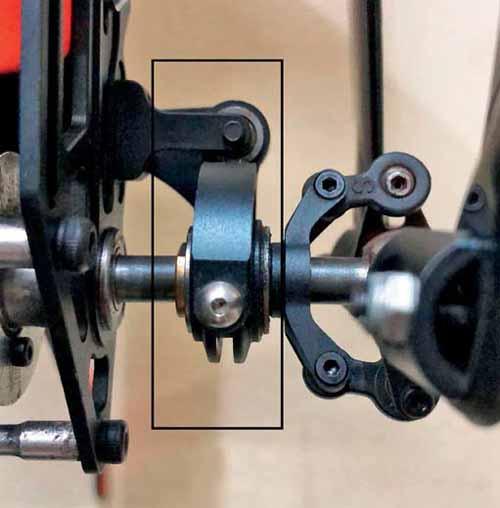
尾控制滑块位于尾波箱和尾桨之间
@Freedniw:模型直升机飞行时尾部锁不住,总往一边转怎么办?
李俊杰:产生该问题的根源可能来自尾舵机械中立点、尾舵控制部分机械结构以及陀螺仪。首先检查尾舵控制结构的顺滑度及虚位是否太大,然后检查尾舵的中立点位置是否正确,最后检查陀螺仪。注意,陀螺仪有可能因累积误差而导致模型漂移。这种情况要尽量减小机体震动或通过更换不同硬度的陀螺仪双面胶来改善。
王周海:总往一边转基本上有两种情况:一种是最基本的锁尾感度偏低;另一种是尾控制滑块的位置不在中点。
按照说明书组装好的模型,其尾控制滑块的位置会与控制摆臂呈90“垂直状态。调试好后,尾桨会预留一定的控制量(5°-15°夹角)。其目的是当模型做大螺距飞行动作时,为抵消反扭矩,尾桨会预先进行补偿动作,从而保持机身不左右晃动,操纵起来更舒服。
戴琛:该问题应分两种清况讨论
(1)尾桨操纵连杆的长度不對,导致尾桨中立点位置错误。这种情况下要根据说明书和实际飞行情况调整连杆长度。部分陀螺仪对尾桨中立点的准确性要求非常高,如JR TAGS MINI机型,如果中立点稍有偏差即会发生尾部偏移的情况。
(2)陀螺仪模式选择错误。陀螺仪有锁尾和非锁尾两种模式,在非锁尾模式下,模型很容易发生尾部偏转的状况。心
猜你喜欢
电脑报(2019年37期)2019-09-10
电脑报(2019年20期)2019-09-10
电脑报(2019年17期)2019-09-10
航空模型(2017年8期)2018-02-08
航空模型(2016年11期)2017-05-08
商界评论(2016年11期)2016-12-01
Coco薇(2016年2期)2016-03-22
现代电子技术(2009年9期)2009-06-25
阅读(中年级)(2009年11期)2009-04-14