冠军是这样炼成的
2019-03-18 07:08河北科大搜救组
航空模型 2019年4期
河北科大搜救组

在学校领导和相关教师的关心和支持下,河北科技大学已经连续10年参加了中国国际飞行器设计挑战赛暨科研类全国航空航天模型锦标赛(以下简称CADC)。10年间,河北科技大学航模队一共获得了7次CADC模拟搜救项目冠军,尤其在2012-2016年,连续5年夺得了该项目的团体冠军。在2018年CADC的模拟搜救项目中,航模队再接再厉,包揽了单项冠亚军和团体冠军!作为河北科技大学航模队CADC模拟搜救项目组的一员,我心里明白,这份荣誉来之不易。
2018年CADC的模拟搜救项目,规则变动幅度创历年之最。与往届相比最大的一个改变,是需要抓取的物资由斯诺克球,变为既有斯诺克球又有三阶魔方。之前我队设计的机械抓取装置,只适用于球体,魔方却是一个立方体,这意味着必须重新设计一款既能抓球体又能抓立方体的机械手。
比赛规则一公布,我队立刻开会商讨竞赛方案,重点是机械抓取装置的设计。初次探讨,大家决定用粘的方式抓取物资。粘取装置主要分两部分:粘头,作用是粘住魔方和斯诺克球,并放入载荷容器中;容器,作用是防止已经进入的物资掉落。这个装置的优点是,物体的摆放方式不影响抓取效率,既能粘球又能粘魔方,而且在飞行过程中,不会出现载荷物掉落的问题。然而测试时发现,一旦外场有扬尘,该装置的使用次数就变得有限,成功率仅有45%。于是只能放弃这个方案。
之后考虑使用机械手完成物资的抓取。根据规则提供的物资规格,得出了机械手抓取物资的要求:标准斯诺克球的直径约52.5mm,重量约146 g:标准三阶魔方的边长约56mm,重量约75g,且6个面不同色。比照这些要求,新方案选取了四爪定心卡盘,其中卡盘直径52mm,4个夹爪均能围绕各自定轴做收缩运动,轻松抓取单个魔方。而通过改变夹爪的长度或弯折角度,4个夹爪收紧时又能完全包裹住斯诺克球。为了防止斯诺克球在运输过程中掉落,我们还特意在机械手内侧增加了曲面结构,增大摩擦力。

2018年CADC模拟搜救项目物资桶内增加了三阶魔方,比赛难度显著提高。

改进后得到的机械手三维模型,其中红色和褐色部分为四爪定心卡盘,绿色和蓝色部分为夹爪。
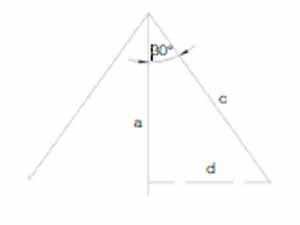
机械手下降到指定点后,卡盘转动30°、夹爪打开的结构简化图。

抓取物资后的机械手结构简化图
很快,机械手的试用品做了出来。但在训练时,出现了许多极端情况。例如当1个斯诺克球夹在两个魔方之间时,机械手无法顺利拾取球。为此,我们将拾取程序设定为:机械手先下降到距拾取区56mm(魔方边长)的高度,然后卡盘转动300、夹爪打开,再拾取斯诺克球。为配合此设定,要求机械手在收紧状态下占用的空间尽量小,且在四爪聚合时,爪尖至少距桶底53mm(斯诺克球的直径)。
已知斯诺克球直径为53mm,抓取时夹爪各自撑开30°后,状态如右侧中栏图所示。

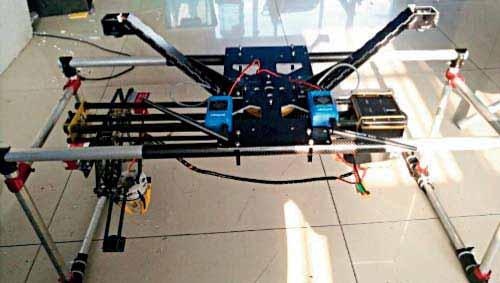
用夹爪抓取物资后的模型直升机
在机械手执行拾取斯诺克球任务时,夹爪处于张开状态,卡盘距地面高度a=53mm。为保证机械手抓取成功,夹爪的长度d>26.5mm。将已知条件整理后构建数学模型,利用余弦定理以及試差法得到3个公式:
b2=a2+c2-2a·c·cos30°
d≥26.5
d2=b2+(a-c)2-2b·(a-c)·cosθ
通过不断试差,最终确定夹爪长度为45.9mm,此时d=26.7mm,符合假定。通过做出实物后的反复验证,发现夹爪长度为45.9mm时,拾取误差不超过±3mm,符合使用要求。
然后根据正弦定理和正弦值表,推得当夹爪聚合时,相对各自定轴的弯折角度为89°。为了增加装置拾取物资的稳定性,夹爪末端被设计成有突起结构的平面,增加摩擦力。此外,我们还在四爪定心卡盘外侧又套了一层卡爪,使得拾取魔方的成功率增至95%。
机械手的设计基本定型,主要包括四爪定心卡盘和卡爪。前者用于拾取斯诺克球和三阶魔方,后者用于防止拾取物掉落。其中四爪定心卡盘上夹爪的收紧、放开、绕各自定轴弯折等动作,均靠电机驱动舵机来实现。为了在夹紧物资时,夹爪的定位点、夹持力皆可控将控制夹爪的舵机转轴与卡盘中心轴重合连接,并以朝下(舵机转轴可向下运动)的姿态固定在伸缩架上,结构简单、组装方便。执行模拟搜救任务时,操纵者只需利用程序控制舵机,舵机便会驱动卡盘旋转,并带动4个夹爪沿中心轴伸缩,达到抓取物资的目的。

比赛时使用的机械手成品,红色部分为四爪定心卡盘,外套的黑色部分为卡爪。

位于滑轨一端的同步轮和皮带传动装置
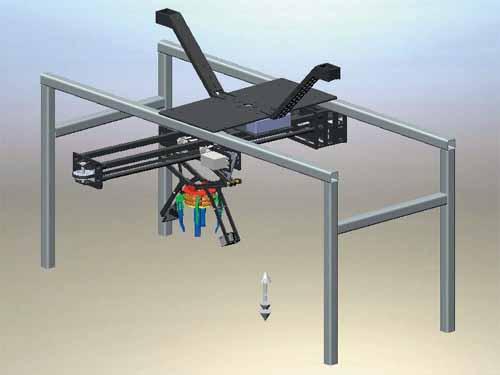
最初設想的运动机构,上层滑轨控制二维平面内的定点,下层伸缩臂控制垂直方向的位移。
除了抓取物的外形,2018年CADC模拟搜救项目规则的另一个变动是执行任务程序,由之前的手动控制机械臂转为自动抓取。因此,要求机械抓取装置的定位必须自动、准确。而且实现劝能时,不仅要对其视觉反馈进行处理,还要对与之相连的伸缩、旋转机构(统称运动机构)进行优化。于是我们决定,在往届成品的基础上,重新设计一套能够伸缩、旋转的运动机构。
根据四爪定心卡盘和卡爪尺寸,运动机构的总尺寸被限定在72cm×32cm×27cm的空间内。因为四爪定心卡盘的舵机转轴固定在伸缩机构上,且需满足舵机每转360°、伸缩机构也整体旋转360°的要求,所以舵机与伸缩机构之间连接轴承的齿轮比被设定为1:1。结合加工齿轮的三轴雕刻机的精度,齿轮模数定为1.6。
可知舵机上齿轮的齿数越多,每个齿对应的转动角度范围就越小。而运动机构的宽度是27cm,如果齿数极限值为50,轴承的外径就是8cm。一般轴承材质为高碳钢GCr15,为了尽量减轻齿轮传动装置的重量,我们采用了密度1.9g/cm3的玻纤材料。
因为运动机构的横向最大距离是72cm,所以为了尽可能增大抓取范围,滑轨长度被确定为63cm。滑轨由4根碳杆、2个全包的直线轴承组成,以极坐标的形式,控制机械手在二维平面内定位。滑轨两端分别放置一个同步车企,且每一端装一个舵机。其中一个控制转动角度,另一个控制水平移动距离。

2018年CADC模拟搜救项目改为自动抓取物资后,场上只有一名负责飞行平台的操纵手。
工作时,机械手靠与之连接的直线轴承在碳杆上做往复运动,不仅运动顺滑、稳定、无间隙,而且定位精确、动力优越,能让抓取装置迅速到达指定位置。其定位舵机通过齿轮与皮带传动装置连接,每转动360°,皮带传动装置移动32cm(滑轨的半径)。因为选用的同步轮半径为1.68cm,可求得周长为10.6cm,即同步轮每转一圈,皮带的行程为10.6cm。所以皮带传动装置的实际操控距离,与皮带行程的比例大概为3:1,即同步轮每转动,圈,与其同步转动的齿轮转动3圈。由此推算,皮带传动装置上的传动齿轮与同步轮的齿数比为,:3。再次取模数为1.6,算得传动齿轮的幽数为13。根据比例关系,并考虑筐轮制作精度产生的误差,确定同步轮的i当数为45。
运动机构做出来后,再次进行了试验。在每天使用7小时、连续使用5天的情况下,我们发现滑轨一端同步轮上的舵机安装位发生了严重形变。经分析找到原因,舵机安装位是薄壁结构,舵机动作时,因受力不均而产生形变。解决方法是把薄壁结构换成了盒式结构,这样不仅增加了舵机工作的稳定性,保证了受力更均匀、侧壁不变形,而且有效防止了舵机淋雨。方案确定后,大家边做边进行优化,尽量保证装置没有虚位、设备总重量减少。
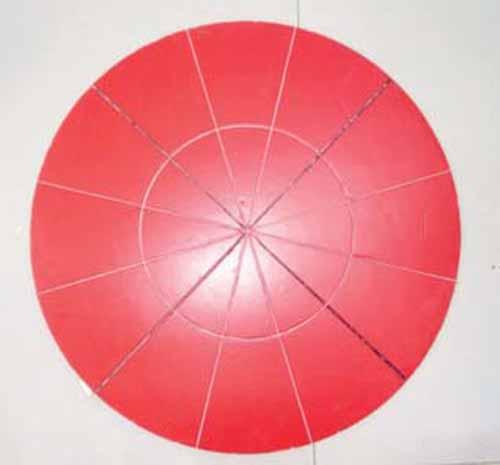
测试用定位盘被分成了12个区域

摄像头畸变调试辅助图
机械抓取装置实物,两个摄像头安装在离地面最高的地方。
由手动控制抓取,变为自动抓取,最大的功夫是下在电脑程序的编写上。最初的方案是双目融合,即将两个不同摄像头里的图像融合成一个大视野里的整体图像。具体实现方法是将两个摄像头的图像经透视变换,合并到一个平面上,以得到完全相同的重合区域。但测试时发现,摄像头之间的距离受抓取装置布局的影响很大,如果距离过大,还会因图像在不同高度平面上而得不到理想的融合效果。尽管负责电脑编程的成员接连几天通宵修改代码,却无法解决问题,无奈放弃了这个方案。
之后我们尝试了双目不融合的方案,即将两个不同摄像头里的图像分别进行畸变矫正,让处理后的图像大致能线性显示实际物体的距离。实现定位功能的方法如下。

360°定位舵机与皮带传动装置靠齿轮咬合实现控制

组员将运行自动抓取程序的电脑搬进赛场
因为处理后的图像能线性显示实际物体的距离,所以假设拟合由线白勺函数为:
y=Kx+b
根据两个图像的结果,可算得具体的拟合函数。接下来根據相机标定的质量和拟合函数,推算出控制定位舵机的PWM信号。由于抓取装置、相机标定、校准靶板都存在一定的误差,因此特詹才巴校准靶板分成了12个区域,最后拟合出由12段直线组成的分段函数,以此提高精度。这个方案利用了相机内参和畸变系数,通过对图像(在程序中以矩阵的形式存在)进行矫正,得到与实际物体成比例的图像。结合利用拟合分段函数的图像处理方式,形成了系统方案,调整数据也更方便快捷。
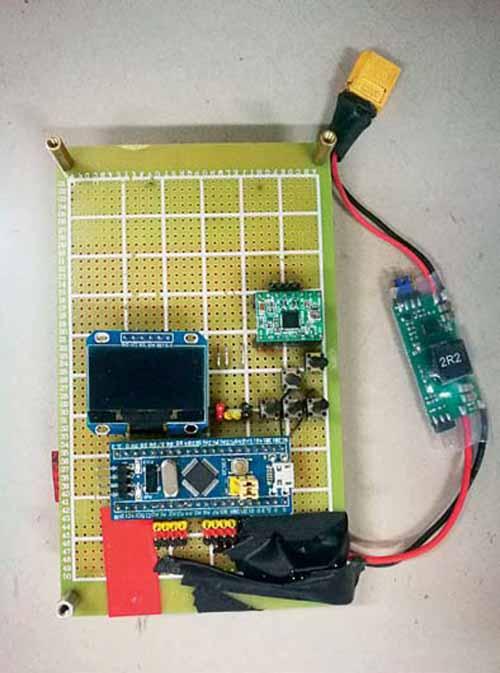
从程序流程图可以一窥机械抓取装置的动作顺序。启动程序后,下位机会向上位机发送一个握手包,之后定时发送心跳包。当上位机的通讯部分正常接收到下位机的握手包和心跳包时,就会把点击鼠标的动作指令转换为控制定位舵机的PWM信号,并与控制抓取装置不同动作的指令一起列为数据位。这两个指令会采用美国标准信息交换码中的特殊控制字符作为帧头和帧尾,并以类似CRC检验的计算方法,算出校验位,再打包成一帧数据,最后发送给下位机。下位机得到数据后,会解析数据并发送到定位舵机和抓取装置,执行抓取魔方或斯诺克球的命令。
自制的舵机调整设备

进入测试阶段的机械抓取装置
为了提高抓取精度,程序中以等分圆心角的方式,把抓取范围分成了12个区域。这种划分方法,适合用极坐标定点,与骨轨装置一致。但难点在于,双目不融合的视觉系统,建立在垂直坐标系下(两个坐标轴垂直),拟合的分段线性函数,也建立垂直坐标系下。所以在得到物资的二维坐标点后,程序还需将其转换成极坐标。如果探测到物资是魔方,发出的指令还包括利用“X”形伸缩臂拉高四爪定位卡盘,方便机械手抓取魔方。这一步不再是二维定位,而是三维定位。
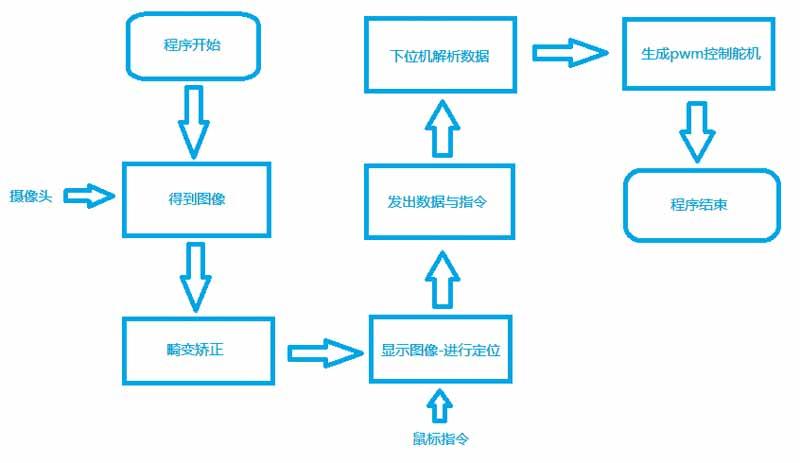
自动抓取系统程序流程图
为此我们设计的抓取程序是,舵机在完成一次拾取后自动归中,调整好角度后再进行下一次抓取。为了保证精准归中和顺利变换角度,还在机械抓取装置上加装了一个调整舵机的设备,以便快速将计算得到的抓取位置转化为控制定位舵机的PWM信号,再用标板辅助摄像头调节畸变,增加物资定位的准确度。通过程序调试,最终实现了每3秒完成一次抓取动作,抓取成功率达到了惊人的98%。
运动机构基本定型后,我们根据测试所得数据,列出了机械抓取装置需要达到的基本性能参数。其中机械手应达到:关节转速<30r/min;工作负载>2kg ;重复定位精度<0.5mm;三自由度。摄像头的镜头,首先保证镜头的成像面大小与摄像机匹配;其次是镜头的焦距,根据实际工作距离确定;最后通过公式组,换算得到其他数据。
Mi=Hi/Ho=Di/Do
F=Do×Mi×(1+Mi)
LE=Di-F=Mi×F
公式中Mi表示放大倍数,Hi和Ho分别表示像高和物高,Di和Do分别表示像距和物距,LE表示镜头范围,F则是镜头焦距。
之后针对运动机构和机械手应具备的功能,我们再次进行了程序系统优化。为得到最稳定的受力结构,在仿真系统中建立了各式各样的分拣、抓取模型。做静应力分析时,在仿真模型中模拟了不同材质立方体和球体的拾取过程,并进行了运动机构和机械手的强度测算。
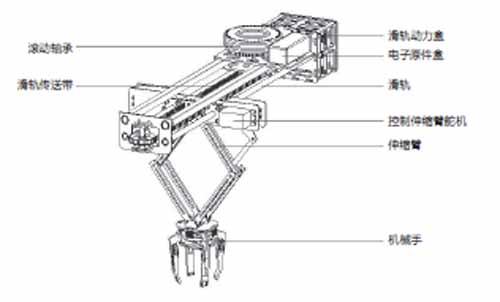
机械抓取装置,由上而下的零件有滚动轴承、滑轨、伸缩臂和机械手。

直线轴承、伸缩臂和机械手细节图。
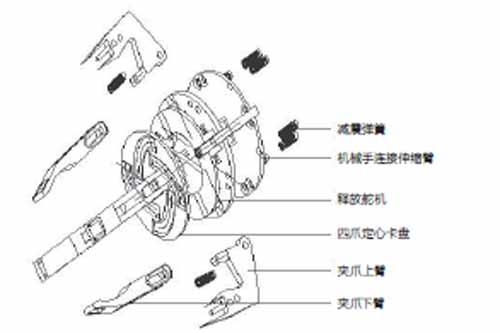
机械手零部件爆炸图。

经过多次优化的机械抓取装置,由上而下的零件有轴承、滑轨、伸缩臂、机械手。其中的轴承、滑轨和伸缩臂,属于运动机构,机械手为机械抓取装置。最上面的轴承是滚珠轴承,可在同一平面内顺滑地旋转360°。滑轨用于延伸机械手的横向距离,与滚珠轴承一起以极坐标的方式标记二维空间内的定位点。伸缩臂是“X”形状,能够快速舒张或收紧,用于控制机械手在三维空间中垂直方向上的运动(Z轴)。机械手采用三自由度、四爪结构,其中四爪定心卡盘控制着四爪围绕各自定轴做收缩运动,配合大扭力舵机,抓取魔方或斯诺克球。外套卡盘,能防止物资在飞行器运动过程中掉落。抓取装置的机器视觉系统是2个光学非接触传感器(摄像头)。在电脑程序的帮助下,该系统先自动获取、处理一个真实物体的图像,然后经过数字化等一系列处理,提取出必要的特征信息加以整合,最后通过逻辑运算,实现准确定位。
猜你喜欢
当代体育(2021年11期)2021-09-10
机电工程技术(2021年3期)2021-09-10
环球时报(2019-07-18)2019-07-18
现代职业教育·中职中专(2018年7期)2018-05-14
环球时报(2017-04-10)2017-04-10
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
中国信息技术教育(2014年5期)2014-03-17
中小企业管理与科技·下旬刊(2009年8期)2009-12-31