
基于仿真技术的三坐标测量工程训练
2019-03-18 11:50孟振华李华伟许岩东袁方方
教育教学论坛 2019年9期
孟振华 李华伟 许岩东 袁方方

摘要:为了解决制约三坐标测量训练教学中存在的问题,设计了一种基于仿真技术的“理实结合”三坐标测量训练教学方法。教学实践表明,该教学方法以工艺理论为基础,借助虚拟仿真实验技术显著提高了三坐标测量训练教学质量。同时,该方法还有效利用了场地和设备等实验资源。
关键词:三坐标测量;工程训练;虚拟仿真;拟合算法
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2019)09-0195-03
三坐标测量机作为一种自动化、智能化检测设备已经广泛应用于机械制造、电子、航空航天、国防等众多领域。各用人单位对于具备三坐标测量操作技能人员的需求也在日益增加,将三坐标测量训练纳入工程训练教学体系对培养学生面向现代制造的综合能力意义重大。然而,三坐标测量训练由于设备成本高、精密易损等原因始终难以在工程训练课程中规模化开展。本文立足工程师培养,通过深入分析三坐标测量训练中存在的问题以及成因,提出一种基于虚拟仿真技术的“理实结合”三坐标测量训练,并应用于工程实践课程教学。
一、现状分析
三坐标测量训练是现代工程训练课程体系建设的重要环节,各高校也开始对于三坐标测量训练课程建设进行探索。西安科技大学的杜媛英、尚长春等通过多层次三坐标测量训练项目丰富了三坐标测量训练内容,满足不同能力水平学生的学习需求;南通大学的张竹青、赵南生等结合数控实训提出了项目式教学,提高了学生学习的积极性和主动性。烟台大学于2013年购置了一台海克斯康explorer 06.08.06三坐标测量机,并针对各类科技竞赛以及实验室开放项目设计了相关的三坐标测量实验科目,并取得了预期成效。然而,三坐标测量却难以作为一个工程训练项目融入工程训练教学体系。
烟台大学工程训练教学组织模式为:“并行分组,串行循环”,将200名学生分成多个小组,每个小组依序完成各工种的训练任务。根据“木桶效应”,接纳人数最少的工种决定了每个工种的分组人数。相比于其他训练工种,三坐标测量训练无论是设备购置成本还是训练室配套设施投入都相对较高。三坐标测量机多数部件精密易损,对于操作技能和操作熟练程度要求较高。因此,现阶段建设一座拥有10台以上三坐标测量机,同时接纳25人以上的三坐标测量训练室难度较大。通过调研发现:目前多数高校只购置了1台三坐标测量机,且多应用于科研与学科竞赛等人数少、学时长、层次高的活动。工程实践课程作为工程训练教学体系的第二层次,其教学重点为工艺技能训练,这就要求在教学过程中既要保证每名学生都能操作设备,又要满足每名学生训练学时量的要求。单靠一台设备只能是“一人操作、众人围观”,显然无法满足工程实践课程的训练要求。
二、教学改革
针对上述问题,烟台大学于2016年实施三坐标测量训练教学研究改革,基于虚拟仿真技术建设“理实结合”的三坐标测量训练教学平台,旨在从理论知识和工艺技能两方面提升三坐标测量训练教学质量。
理论知识方面补充测点拟合算法作为三坐标测量工艺的理论基础。常见的测点拟合算法有最小二乘法、拉格朗日插值法、牛顿迭代法等。鉴于学生的理论课程学习程度,最小二乘法算法只涉及高等数学求导运算和线性代数矩阵计算等基础知识,其原理易于理解,适合作为三坐标测量训练的理论教学内容。学生通过最小二乘法学习可以从理论层面理解各种几何要素的生成过程以及测点策略,为后续实践操作夯实了基础。
虚拟仿真技术应用于工程训练可以有效节约设备的购置成本,通过仿真操作环境达到训练学生操作能力的目的。选择虚拟仿真仪器需要把握好“虚”与“实”的结合程度,“虚”是手段,“实”是目的。如果“虚”的成分过多会导致训练环境脱离工程实际,如“全虚拟”三坐标测量机,其XYZ方向操作手柄也由鼠标点击完成,这种虚拟仪器与真机在操作方式上差距较大,不利于操作技能训练,而“实”的成分过多又会大幅增加设备购置成本,制约训练规模。综合考虑上述原因,本项目采用泰西测量的三坐标仿真测量系统,由虚拟测量软件以及实体操作手柄组成,测量软件基于RationalDMIS离线测量功能开發。仿真三坐标测量训练室以计算机房为基础,实现了一人一机的训练条件,并使计算机房成为兼顾CAD/CAM训练和仿真三坐标测量训练的多功能训练场地,提升了训练场地和实验设备的使用率。
三、教学组织
三坐标测量训练共安排16学时,分为测量原理和工艺训练两个环节。
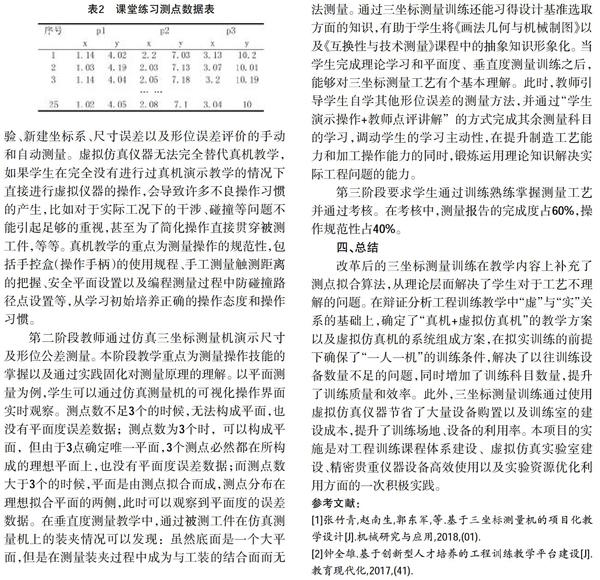
第三阶段要求学生根据自己的小组编号,运用线性最小二乘法,按照表2对应序号行的数据计算出平面直线方程。考虑到手工计算4阶以上逆矩阵比较烦琐,故将已知测点数控制为3点。熟悉Matlab等计算软件的学生也可以编程计算。本阶段教学重点在于让学生通过动手计算感受测量软件实施评价的过程。
2.工艺训练。工艺训练12学时。第一阶段为真机演示教学,教师操作三坐标测量机(真机)进行测头校验、新建坐标系、尺寸误差以及形位误差评价的手动和自动测量。虚拟仿真仪器无法完全替代真机教学,如果学生在完全没有进行过真机演示教学的情况下直接进行虚拟仪器的操作,会导致许多不良操作习惯的产生,比如对于实际工况下的干涉、碰撞等问题不能引起足够的重视,甚至为了简化操作直接贯穿被测工件,等等。真机教学的重点为测量操作的规范性,包括手控盒(操作手柄)的使用规程、手工测量触测距离的把握、安全平面设置以及编程测量过程中防碰撞路径点设置等,从学习初始培养正确的操作态度和操作习惯。
第二阶段教师通过仿真三坐标测量机演示尺寸及形位公差测量。本阶段教学重点为测量操作技能的掌握以及通过实践固化对测量原理的理解。以平面测量为例,学生可以通过仿真测量机的可视化操作界面实时观察。测点数不足3个的时候,无法构成平面,也没有平面度误差数据;测点数为3个时,可以构成平面,但由于3点确定唯一平面,3个测点必然都在所构成的理想平面上,也没有平面度误差数据;而测点数大于3个的时候,平面是由测点拟合而成,测点分布在理想拟合平面的两侧,此时可以观察到平面度的误差数据。在垂直度测量教学中,通过被测工件在仿真测量机上的装夹情况可以发现:虽然底面是一个大平面,但是在测量装夹过程中成为与工装的结合面而无法测量。通过三坐标测量训练还能习得设计基准选取方面的知识,有助于学生将《画法几何与机械制图》以及《互换性与技术测量》课程中的抽象知识形象化。当学生完成理论学习和平面度、垂直度测量训练之后,能够对三坐标测量工艺有个基本理解。此时,教师引导学生自学其他形位误差的测量方法,并通过“学生演示操作+教师点评讲解”的方式完成其余测量科目的学习,调动学生的学习主动性,在提升制造工艺能力和加工操作能力的同时,锻炼运用理论知识解决实际工程问题的能力。
第三阶段要求学生通过训练熟练掌握测量工艺并通过考核。在考核中,测量报告的完成度占60%,操作规范性占40%。
四、总结
改革后的三坐标测量训练在教学内容上补充了测点拟合算法,从理论层面解决了学生对于工艺不理解的问题。在辩证分析工程训练教学中“虚”与“实”关系的基础上,确定了“真机+虚拟仿真机”的教学方案以及虚拟仿真机的系统组成方案,在拟实训练的前提下确保了“一人一机”的训练条件,解决了以往训练设备数量不足的问题,同时增加了训练科目数量,提升了训练质量和效率。此外,三坐标测量训练通过使用虚拟仿真仪器节省了大量设备购置以及训练室的建设成本,提升了训练场地、设备的利用率。本项目的实施是对工程训练课程体系建设、虚拟仿真实验室建设、精密贵重仪器设备高效使用以及实验资源优化利用方面的一次积极实践。
参考文献:
[1]张竹青,赵南生,郭东军,等.基于三坐标测量机的项目化教学设计[J].机械研究与应用,2018,(01).
[2]钟全雄.基于创新型人才培养的工程训练教学平台建设[J].教育现代化,2017,(41).
猜你喜欢
求知导刊(2016年35期)2017-02-24
山东工业技术(2016年24期)2017-01-12
大学教育(2016年12期)2017-01-03
大学教育(2016年11期)2016-11-16
计算机教育(2016年7期)2016-11-10
科技资讯(2015年19期)2015-10-09
