
国外动力集中动车组网络系统的发展与借鉴*
2019-03-18 11:32:36陈波
铁道机车车辆 2019年1期
陈 波
(中国铁道科学研究院集团有限公司 机车车辆研究所, 北京 100081)
截至2017年底,我国铁路营业里程达到12.7万km,其中有20%为高速铁路/客运专线,其余为普速铁路。与之对应的,我国现有客运产品分动车组和普速列车两类,虽然统一的技术体系使动车组跨线运行于普速铁路并不存在问题,但铁路运输企业也从安全管理、经济指标等方面考虑,逐步减少在普速铁路开行动车组列车,而既有普速旅客列车以机车牵引25T、25G型客车为主,存在折返换端时间长、舒适度差、所需客运工作人员多等问题,因此急需发展一种新的客运产品,以完善客运产品体系,形成新的客流增长点[1]。我国速度160 km/h 动力集中电动车组的研制即基于此需求背景,旨在充分利用既有线路和机、客车的检修资源,提高既有线铁路运输服务品质。
世界上动车组按动力分布方式可以分为动力集中和动力分散式,Volker Müller[2]在从运用、市场和列车型式的发展趋势等方面,分析了这两种方式的特点,特别利用了寿命周期成本(LCC)来比较二者的优劣,认为从LCC角度采用动力分散的ICE3列车比采用动力集中的ICE2列车具有一些优势。但同时他也提到,对于每一种列车要考虑其技术、运用甚至政治因素,要对速度、站间距离、值勤人员情况、地形状况、制造生产能力、使用和维护要求等各方面因素都要给予考虑。与国外动力集中动车组相比,我国速度160 km/h动力集中电动车组具有明显的中国特征,设计尤需考虑不同厂家、不同平台动车组间互联互通运行的需求。通过介绍国外主要动力集中动车组网络系统的技术情况,为我国动力集中动车组的发展提供借鉴。
1 国外动力集中动车组及推挽式列车
动力集中式作为铁路运输中最为传统的列车牵引运行方式,是相对于动力分散式而言。其基本特点是由一台动力机车牵引无动力车辆在轨道上行驶,机车大多是在列车的最前端牵引车辆,亦有自车尾顶推甚至机车置中牵引的情况,后来也出现由两台机车前后推挽的动力集中列车模式。
国外对于动车组(Multiple Units, MU)并无统一定义,例如国际电工委员会IEC定义为“由一个或多个单元组成的列车,可同时从一个司机室控制,并能在任一方向以正常速度运行而无需重新编组”[3],而欧盟铁路机车车辆互联互通技术规范TSI定义为“一种固定编组列车,其所有车辆都能运载有效载荷(乘客、行李/邮件或货物)”[4]。如果严格按照TSI的定义,将不存在动力集中动车组这种组合形式,例如法国TGV列车是动力集中式,但不属于动车组。一般以IEC的动车组定义应用更为广泛些,国际上的主要动力集中式动车组主要有TGV、Eurostar、AVE-S 100、ICE1、ICE2、ETR 500、Talgo 350 I、HSR 350 X、Electra 91、X2000等,动力分散式动车组主要有(Pendolino-ETR 450/ETR 460系列、Shinkansen-JR 100/JR 300/JR 500系列、ICE3、Velaro E等[6]。本节以德国ICE1/ICE2、意大利ETR 500和法国TGV-A等为例介绍早期动力ICE1于集中式动车组网络系统的技术特点,以及TCN标准的形成。
1.1 德国ICE1/ICE2
1991年6月在汉诺威—维尔茨堡、曼海姆—斯图加特线上投入运行。改进设计的ICE2的先期研究工作1992年完成,1993年订货,1997年5月首批交付运用。ICE1是由动力集中配置的2台动力车和最多14辆中间拖车组成的电动车组,牵引功率9 600 kW(GTO牵引变流器)或7 600 kW(IGBT牵引变流器),供电制式AC 15 kV/16.7 Hz,在Nuremberg-Ingolstadt高速线路最高运营速度280 km/h[7-9]。早期的ICE1编组中,中间拖车有9~14辆不等,在2008年完成的车辆翻新项目中,均被调整为12辆中间拖车的标准编组[7]。ICE1的列车网络通讯依赖于全列布置的通信光纤,以保证牵引和制动指令在两台动力车的同步实施,如果列车运行时发生光纤断裂,故障导向安全机制将触发最大常用制动使列车自动停车。
ICE1的光纤网络拓扑如图1所示[10],上部为动力车总线(Power car bus),用以在两动力车间传输控制信息和交换状态信息,在9车(Service car)也可以接入;下部为列车总线(Train bus),用以向旅客传输服务信息,如列车径路显示、车厢号、座位预留状态、下一站、预计到站时间、站台开门侧等以及用于列车长广播和列车司机间的语音通话。列车总线在每节车厢进行一次光电转换,如图1中蓝色方块所示。与所有安全关键系统一样,ICE1的网络系统也具备冗余性,动力车总线与列车总线共同构成了环网结构,二者在动力车中实现光耦合连接,如果动力车总线出现故障,动力车信号亦可以通过列车总线传输,且具有最高优先级;如果某一车厢的列车总线出现故障,则列车总线数据可经由动力车总线环路传至尾部动力车,并通过光学馈送至受影响车厢,但传输优先级较低。
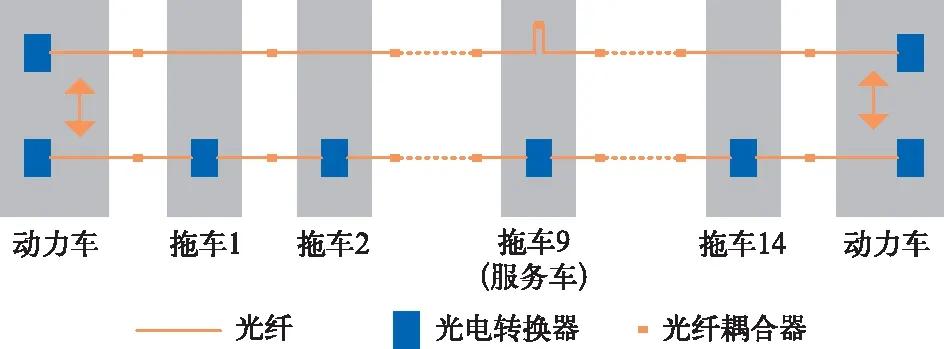
图1 ICE1的光纤网络拓扑
光纤通信具有传输容量大、保密性好等许多优点,且不易受电磁干扰(EMI),ICE1的研制阶段正是光纤通信的迅速发展期。但与铜缆传输电气信号相比,光纤通信也有一些缺点,例如成本较高、可维护性较差等。ICE1各车辆间的光纤连接器易受润滑剂残留物或其他污物影响,往往成为整个网络的易损关键节点,此外车辆内的光纤在使用多年后本身也容易遭受损坏。光纤断点的诊断曾是困扰德国国家铁路公司(DB)的棘手问题,早期只能通过半分法进行测试判断,这对于ICE1这种固定编组式列车效率非常低下,常需要16 h,后在横河电机公司(Yokogawa)的协助下采用C-OTDR方法才使诊断效率提高,但处理光纤故障仍需3~4 h[10]。
ICE1属长编组列车,不支持重联运行,因此德国铁路从运输组织的需求出发,又设计了ICE2型列车,以获得更高利用率。ICE2总体设计思想主要体现在列车编组的变化上,即将ICE1列车一分为二,由1台动力头车+6辆拖车+1辆控制车组成短编组动车组,头车端部装有自动式Scharfenberg车钩和头罩,可以重联运行。在运量较大的核心区段两列短编动车组重联运营,在该区段两端解联以短编组运营[11]。ICE2除了增加了控制车这一新车种外,动力车与ICE1非常相似,拖车则做了诸多改进,轴重降至11.6~13 t,并优化了车内空间和设施,偶尔ICE2的动力车和拖车也会用于ICE1列车的编组[7]。ICE2提升了控制计算机的性能,外部增设了终到站显示(重联列车可能在车站解编分别以短编组开往不同目的地),以满足重联运行的需求,并具有更好的防空转/滑行能力[8],采用了SIBAS 32控制系统。
1.2 意大利ETR 500
ETR 500是由安萨尔多百瑞达、阿尔斯通和庞巴迪联合为意大利铁路公司生产的动力集中型高速列车,有ETR 500和ETR 500P两代车型。ETR 500为2动11拖编组,适用于DC 3 kV供电制式,于1992年至1996年间交付,运营速度250 km/h;改进的ETR 500P适用于DC 3 kV/AC 25 kV 50 Hz两种供电制式,于2000年至2005年间交付,运营速度300 km/h,早期ETR 500P维持2动11拖编组,后来衍生出12辆拖车和8辆拖车的车型[12]。
ETR 500的信息系统的核心部分包括车载系统服务,即用于自动化和电气列车远程控制的冗余通信操作系统SOCRATE,由ANSALDO TRASPORTI公司提供。此外还有两个附加系统与SOCRATE集成,分别为语音通信系统和旅客服务系统,后者可为旅客提供HiFi和视频服务。所有系统采用分布于每辆车的模块化设计,以便列车编组改变时不影响车辆的一致性[13]。
为了增强系统的可靠性,SOCRATE采用了冗余设计,但主要是在车辆节点和通信线缆布置上,如图2所示。列车节点分为动力车节点UCM和拖车节点UCC,节点间通过LAN相连,并以主/从方式工作,一般主节点为主控动力车,发送并从其他从节点接收数据。数据传输介质为冗余布置的屏蔽双绞线,依据EIA RS485标准,传输速度为1 Mb/s。同时,SOCRATE可与光纤共同工作,光纤主要用于旅客服务系统。
每个节点(UCM或UCC)均包含两个相同的单元,由微处理器系统构成,布设于两套总线上:系统总线和I/O总线。由于每个节点都通过两个相同的单元连接到LAN,并通过分路器连接到设备,所有功能都是冗余的,所以可靠性很强。
主节点的功能包括:(1)通信线路控制:在列车启动时,主节点依次激活并识别从节点,进行网络的初始化,线路故障时具有诊断和提示功能;(2)远程控制:操作指令如牵引和制动等同步发送至从控动力车,并将指令发送至各拖车相关设备;(3)故障诊断:主节点可在从节点获取列车设备的警报和故障信息;(4)司机提示:主节点可向司机终端发送关于所有列车装置的信息;(5)在线维护:主节点可向诊断控制台发送所有与测量、状态报警和故障相关信息;(6)线下维护:有关故障信息会同时发送至高速列车维修车间,以便提前准备检修设备或备件。
车辆节点主要连接如下单元:静止逆变器、充电机、车门控制单元、制动控制单元、空调设备、照明设备、防滑控制单元、转向架蛇行控制单元、旅客信息显示、语音通信设备、旅客服务设备等。
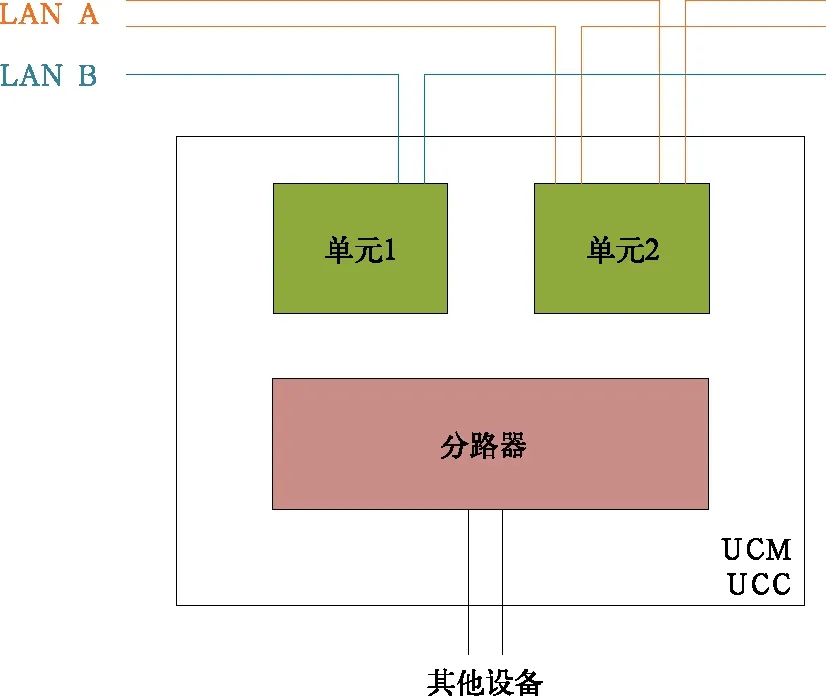
图2 车辆节点与通信线缆的冗余设计
语音系统(PHONIC SYSTEM)通过切换可用线路并解决同时占用的问题来处理不同用户之间的语音通信,包括地面调度员和车上工作人员间、车载公用电话与国家SIP服务间、机务人员与乘务人员间等。
旅客服务系统(System for passenger SERVICE)包括:1个音频双向通道,用于向乘客和工作人员发出紧急警报;6个立体声音乐频道(6×15 kHz);1个视频频道(5 MHz)。调制后的信号被转换成波长为0.8 bm的光信号并通过光纤传输,在车辆末端光纤耦合由一个4路耦合器实现,但也可采用10 GHz频率的无线电链路作为替代。后续ETR 500也有采用电力线通信实现旅客服务系统信息传输[14]。
可见,ETR 500的信息系统较为复杂,3部分功能结构如图3~图5所示,这主要是为了达成两大设计目标:(1)在速度、旅行舒适度和诸多设施方面为旅客提供高水平服务;(2)基于设备质量和高级维护系统的高服务可靠性。
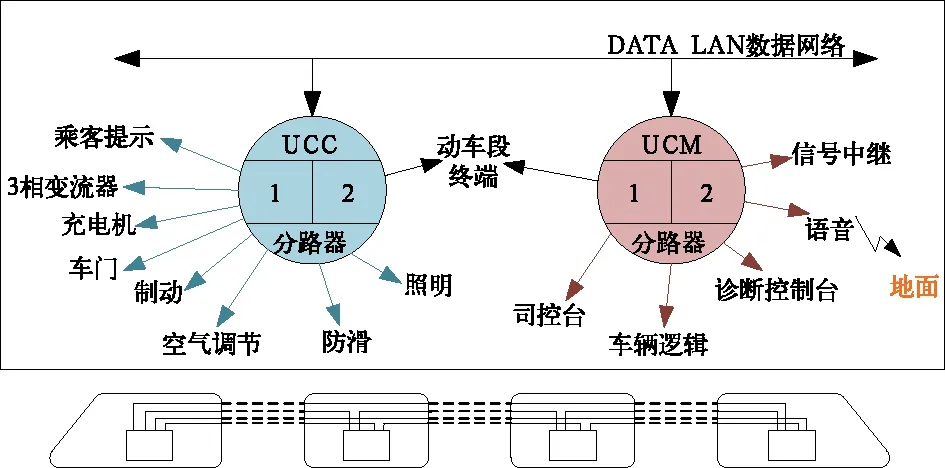
图3 ETR 500的SOCRATE系统
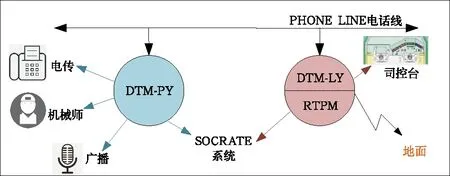
图4 ETR 500的语音系统
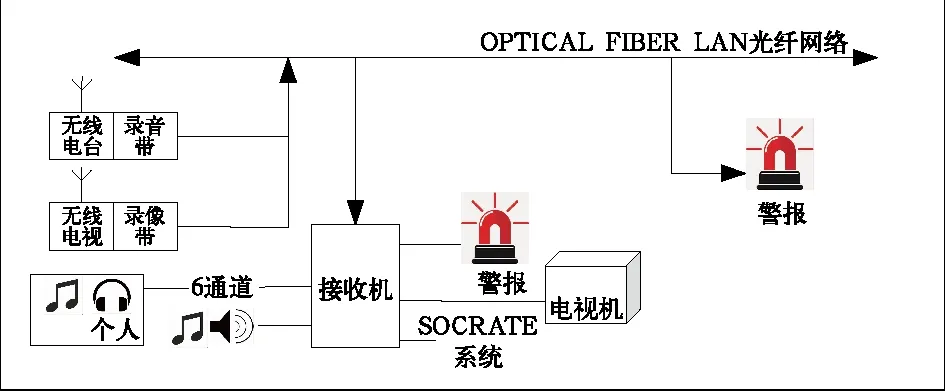
图5 ETR 500的旅客服务系统
1.3 法国TGV-A
法国国铁TGV Atlantique列车(TGV-A)是第2代的TGV,采用2动10拖编组,供电制式25 kV 50 Hz,牵引功率8 800 kW,最高运营速度可达300 km/h,从1989年开始投入SNCF法国高速铁路大西洋线的营运。1990年TGV-A取得了最高515.3 km/h的世界纪录,直至2007年4月3日被TGV POS以574.8 km/h的速度更新[15]。
TGV-A采用了TORNAD和CAN为主的网络结构,TORNAD即“Token Ring Network Alsthom Device”,为Alstom自主开发的网络系统,属于令牌环网,用于单列18台车载计算机间的通信,支持重联运行,物理介质主体为2股双绞屏蔽双芯线,传输速率1 Mb/s,以及少量安全控制硬线和音频线;CAN网则主要用于牵引设备的控制与同步[16]。TGV-A的网络拓扑如图6所示,18台车载计算机可分为3类:司机室计算机(Driver's cab computer)、电机组计算机(Motor bloc computer)和客车计算机(Passenger car computer)[17]。
每个司机室装有1台主计算机(Main cab computer)和1台辅助计算机(Auxiliary cab computer),主计算机由18块板卡、200个输入和75个输出组成,并连有荧光显示屏和字母数字键盘,用于驾驶室和客车间的交互。主计算机的功能包括:(1)控制列车网络上所有计算机的信息交换(包括重联列车),发生故障时由从控端司机室的主计算机代替执行;(2)通过无线数据传输,控制车载处理器和地面设备间的控制信息交互;(3)将通过网络发送的各种信息和信令解码,并在司控台上显示;(4)在发生故障时,向司机提供操作提示和预防信息。
在从控司机室,主计算机接收其功能执行所需数据,并在运行中将信号传输到主控司机室。各司机室的主计算机均监视转向架的不稳定性,接收并记录故障数据,必要时提示列车运行速度。
辅助计算机由9块板卡、50个输入和50个输出组成,作为主计算机的备份提供如下功能:(1)在主控司机室中,对来自主控制器的命令进行编码和传输,以及数据解码和司控台显示;(2)在从控司机室中,用于接收指令和传输信号。

00-固定电台;0-车载电台;1-司机室主计算机;2-司机室辅助计算机;3-电机组1计算机;4-电机组2计算机;5-客车1计算机;14-客车10计算机;15-电机组3计算机;16-电机组4计算机;17-司机室辅助计算机;18-司机室主计算机。图6 TGV-A的网络系统结构
电机组计算机实现了转向架2台电机和相关设备(整流器、斩波器、变流器,功率因数校正设备和通风设备等)的所有控制、调节和监控功能。在牵引模式下,电机组计算机按供电网络可用功率调整列车取用功率,并根据轮轨黏着条件计算最佳牵引力;在制动模式下,计算机根据列车管减压,并根据程序分配空气制动力和电气制动力,以减少制动盘的磨损。
客车计算机的功能包括:(1)控制和调节空调设备;(2)车门控制;(3)监控制动器,如防滑系统、检查正确的制动施加和释放、防止轴抱死等;(4)转向架稳定性监测;(5)旅客信息显示,列车名称、车号、终到站和中途停靠站等;(6)故障记录以便于后续维修。需要立即处理的严重故障,将通过网络提示相关人员,如转向架失稳、轴抱死信息发送给司机,车门未关闭、空调故障信息发送给乘务员,报警信号同时发送给司机和乘务员。
为了提高系统安全性,最大限度减小计算机故障的影响,一些功能采用冗余计算机或紧急备用计算机方式,例如一个转向架的制动同时由2台计算机监控,第1台计算机作为主防滑系统,第2台计算机则监视轴抱死,但在第1台计算机故障时作为备用防滑系统。
在后续的TGV车型中,Alstom将网络拓扑由环网改成了总线网络,相应的网络系统命名为TORNAD*[18]。
1.4 TCN标准的形成及应用
ICE1/IEC2、ETR 500以及TGV-A等动车组均是1990年前后投入运用,其主要研发时间在1990年以前,受当时计算机、通信等技术背景影响,车载网络系统的差异性较大。
1988年IEC TC9与世界上20多个主要铁路运营部门和机车车辆制造厂家代表,以及国际铁路联盟的代表,共同组成WG22工作组,旨在制订一个开放的通信系统,从而使得各种铁道机车车辆能够相互联挂,并且车上的可编程电子设备能够互换。1992年6月WG22以委员会草案(Committee Draft)的形式向各国发出列车通信网络的征求意见稿,该稿分成4个部分:第1部分为总体结构,第2部分为实时协议,第3部分为多功能车辆总线(MVB),第4部分为绞线式列车总线(WTB)。
经过多年的努力,WG22在西门子公司和Adtranz公司原有技术方案的基础上,共同开发出了一套系统标准。1994年5月至1995年9月欧洲铁路研究所(ERRI)在瑞士因特拉肯至荷兰阿姆斯特丹之间的铁路,对瑞士联邦铁路(SBB)、德国铁路股份公司(DB)、意大利国家铁路(FS)、荷兰铁路(NS)的车辆编组而成的试验列车进行了全面的TCN实验。1999年6月TCN标准草案61375-1正式成为国际标准[19]。
因此,在ICE1和ICE2上可以看出TCN网络的雏形,后续的动力分散型动车组ICE3则采用了标准的TCN网络,具有WTB和MVB两层网络结构。ETR 500的SOCRATE也可归于TCN网络,但因其采用了UIC的旧13芯连接器,WTB通信线定义与标准TCN不同,故称为TCN*,而TGV-A的TORNAD则并不符合TCN网络特征。
TCN标准发布后,被大量的动车组、机车和地铁车辆采用,我国中华之星动力集中动车组也采用了WTB/MVB的TCN网络结构。韩国在基于TGV研发KHST-7试验动车组时,采用了如图7所示的网络拓扑(以牵引和制动系统为主画出),详细的介绍可以参考文献[20]。

图7 KHST-7的网络系统结构(牵引与制动)
2 中国速度160 km/h动力集中电动车组CR200J
速度160 km/h动力集中电动车组动力配置和编组形式包括:短编组(1Mc+7T+1Tc)、长编组(1Mc+18T+1Mc)和灵活编组(1Mc+9T~18T+1Mc)3种方式,其中Mc为动力车,T为拖车,Tc为控制车,动车组的车种可根据运用需求灵活配置。研制厂家包括中车旗下多家公司,需实现不同生产厂家的动力车与动力车、控制车与动力车之间的匹配,短编动车组需实现控制车与动力车端连挂、控制车与控制车端连挂组合的重联运行。
速度160 km/h动力集中电动车组动力车以八轴客运电力机车技术平台为基础,参照中国既有动车组经验及要求进行优化设计;拖车、控制车以既有25T型客车为基础,在平面布置、内部装饰、人机界面等方面参照既有CRH动车组进行优化设计。
2.1 动力车
速度160 km/h动力集中电动车组动力车目前有两个平台,均符合TCN标准的两级网络(列车级WTB/车辆级MVB)进行通信和控制,同时在动力车内部布设以太网。
动力车平台A的网络拓扑如图8所示,网络控制系统由WTB/MVB网关GW、中央处理单元CCU、记录存储模块ERM、司机室输入输出单元CIO、机械间输入输出单元MIO和司机室显示单元DDU等组成,通过MVB与牵引控制单元TCU、制动控制单元BCU、列车供电系统ETS等进行通信。同时,控制系统设置MVB/Lonworks网关,可与拖车实现诸如车门状态、火灾报警等信息交换。以太网仅作为监视网运行,因此在图8中未画出。
动力车平台B的网络拓扑如图9所示,列车级网络采用标准WTB网络,以实现互联互通互控;车辆级网络采用MVB+ETH双网热备方式,ETH采用环形拓扑结构符合IEC 61375-3-4标准。网络控制系统主要部件包括:WTB/MVB/ECN网关GW、以太网交换机CS、中央处理单元CCU、记录存储模块ERM、远程控制单元RIOM、和司机室显示单元DDU等组成,通过MVB与牵引控制单元TCU、辅助供电单元APU、制动控制单元BCU、列车供电单元LGU等进行通信。同时,控制系统也设置MVB/Lonworks网关,用以与拖车进行信息交换。
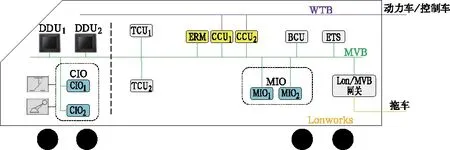
图8 动力车平台A网络拓扑示意

图9 动力车平台B网络拓扑示意
2.2 拖车/控制车
速度160 km/h动力集中电动车组拖车车辆电气监控系统由车辆控制单元、供电系统、电源装置、轴温、烟火、塞拉门、防滑器、车厢监控屏、列车级电气监控系统主机及显示屏(仅餐座合造车或普通座车(带餐吧))和两级Lonworks网络(列车级、车辆级)等组成。控制车的客室部分网络同拖车,司机室部分网络同动力车(目前为平台A的简化),通过在动力车或控制车设置的MVB/LonWorks网关将拖车信息通过网络直接显示在司机室显示屏,整列网络拓扑如图10所示。
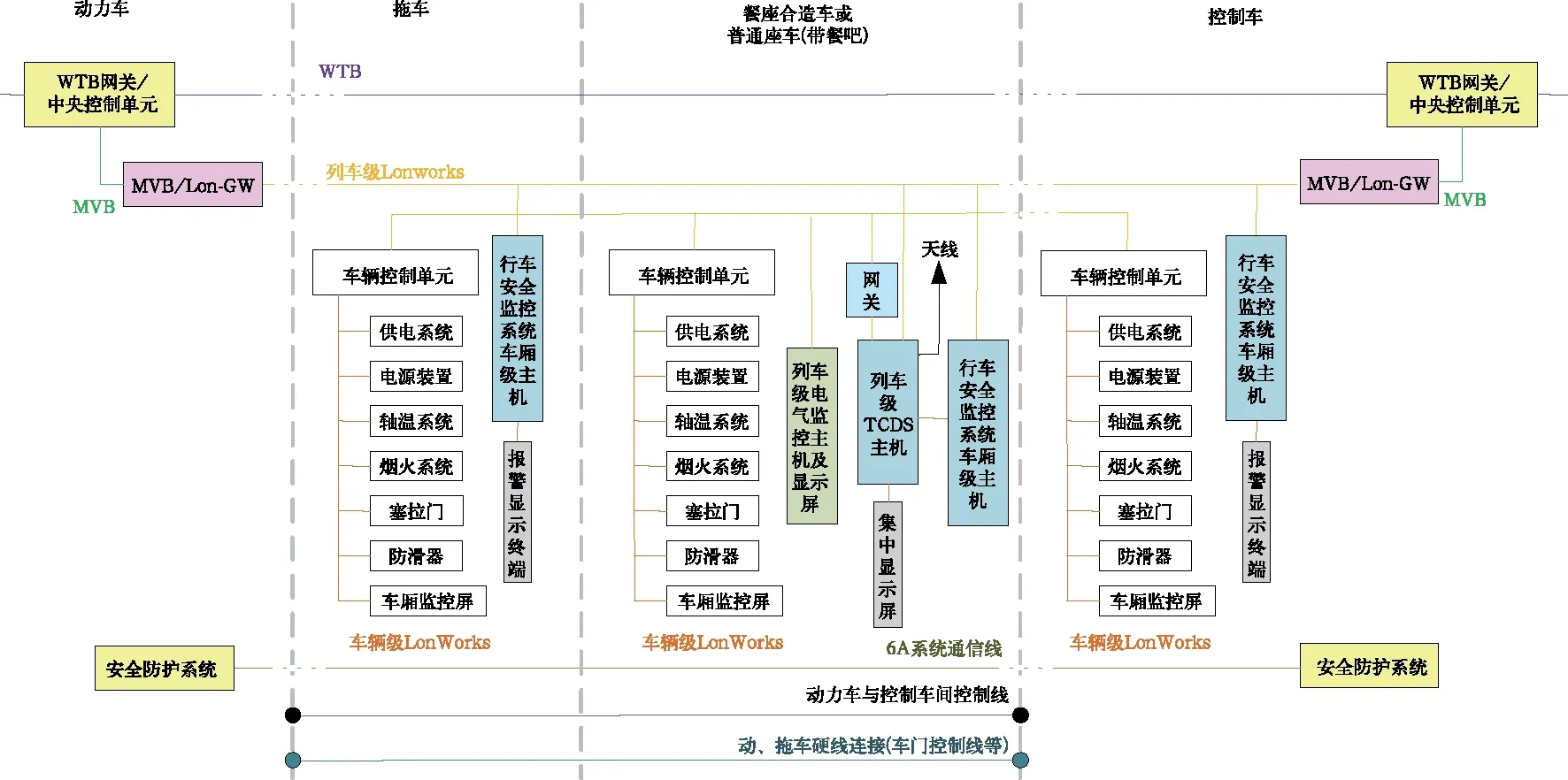
图10 动力集中电动车组网络拓扑示意(短编组)
在25T客车成熟旅客信息系统(PIS)的基础上增加车外信息显示屏,集成广播播音系统,如图11所示。为保证PIS系统互联互通,有RS485总线、音频总线和主从信号线贯穿全列,但动力车和控制车司机室并不接入。乘务员室照明控制开关可控制本车厢照明,播音室可集控全列照明。
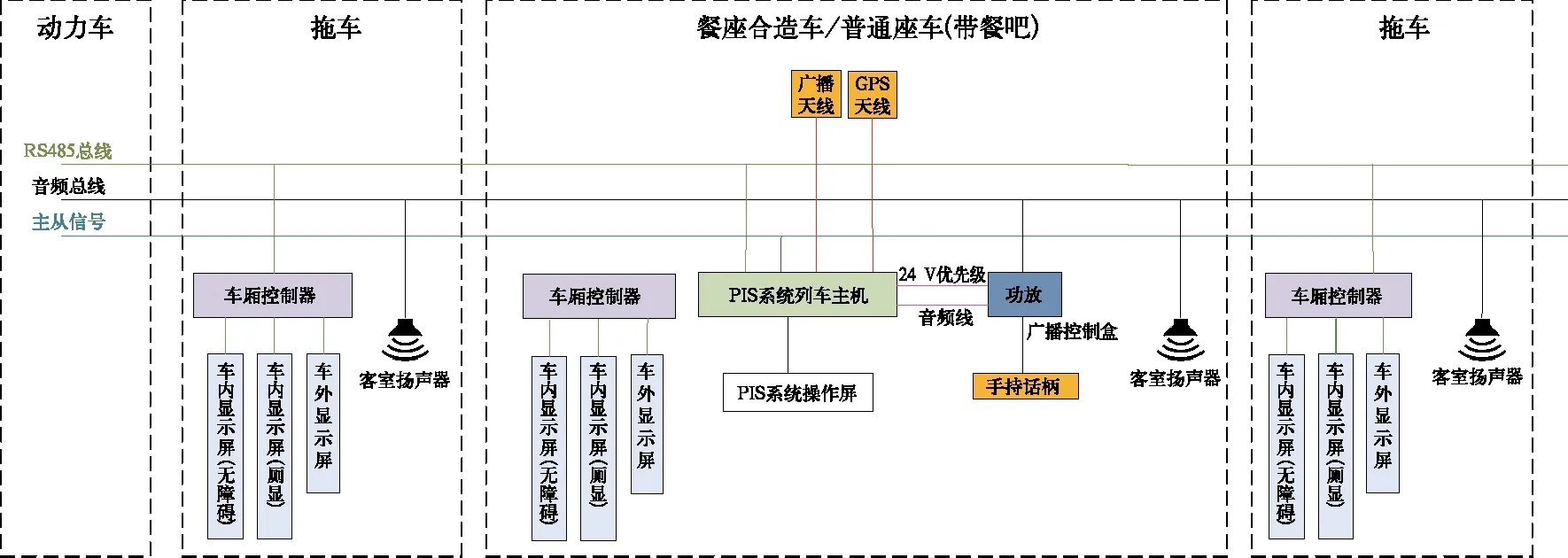
图11 动力集中电动车组PIS系统示意
2.3 安全与监控
动力车和控制车安装机车车载安全防护系统(6A系统)和远程监测与诊断系统(CMD系统),实现走行部安全监测、防火监控、高压绝缘检测、视频监控、列车供电监控、制动安全监控等;拖车安装行车安全监控系统,实现对拖车的转向架、制动和防滑器的状态监测与诊断,并将车辆电气监控系统对拖车的烟火、塞拉门、防滑、轴温、空调、供电监测信息通过TCDS主机与TCDS地面系统进行无线通信,实现数据落地和远程监控。同时TCDS主机将塞拉门、轴温、烟火、制动等信息传递给动力车和控制车。
此外,动车组设硬线安全环,包括门控安全环线、制动安全环线、轴温报警安全环线和火灾报警安全环线等,并设列车及单车旁路。拖车车门未关闭,列车牵引封锁,司机显示单元报警;拖车轴温绝对温度超过90℃报警时,列车自动实施常用制动直至停车,司机显示单元报警;拖车发生严重制动报警,列车自动实施常用制动直至停车,司机显示单元报警;拖车火灾报警时,司机操纵台产生声光报警。
3 对比分析
由于计算机和通信技术发展日新月异,国外几个典型动力集中动车组的网络系统是特定时期的产品,于今并无太多技术借鉴价值,表1列出了文中各动力集中动车组的网络对比。IEC 61375标准发布以来,TCN网络得到了广泛的应用和发展,我国速度160 km/h动力集中电动车组动力车即采用了TCN网络,并且尝试部署了以太网,形成了MVB/ETH双网冗余结构。

表1 文中动力集中动车组的网络对比
从上述分析可知,ICE1/ICE2、ETR 500和TGV-A等车型虽然是早期车型,但网络设计整体性较强,动力车和拖车遵循同一网络架构。同时,运用单位和制造企业对旅客体验较为重视,尤其是ETR 500专设光纤以满足音、视频功能需求。
而我国CR200J动车组在动力车和拖车分别部署了TCN和Lonworks两套网络,通过MVB/Lonworks网关连通,增加了网络的复杂性,且MVB/Lonworks网关将成为动力车与拖车间通信的瓶颈。例如动力车和控制车间有35根贯穿线,分制动系统、标志灯控制、紧急牵引、重联电话、远端控制电源控制等功能组,以及3组通讯功能接口:WTB总线、VDSL2总线及CAN总线通讯接口,其中后两者用于6A系统;与拖车信息交互亦需35根贯穿线和3组通讯功能接口,贯穿线分为车列电空、拖车车门控制、拖车安全环路、集控供电等功能组,通讯功能接口有RS485总线、广播音频总线和Lonworks信息线等。动力车/控制车外重联端采用了196芯电气连接器。
CR200J动车组的这种网络布置,主要是为了最大限度沿用八轴客运机车和25T型客车的既有产品,一定程度上减小了研发成本,但导致了全列网络系统架构较为复杂,整体性考虑欠佳,例如目前拖车仅支持手动设置PIS车厢号,不具备车厢号自动编号功能,且各拖车电气综合控制柜、PIS车厢控制器、TCDS和火灾报警控制器的车厢号设置相互独立,需分别更改才能实现各设备车厢号统一,这可能会为后续的运营维护带来不便。
4 结束语
国外早期主要动力集中动车组车型如德国ICE1/ICE2、意大利ETR 500和法国TGV-A等均在1990年附近研制并投入运用,其网络系统差异性较大,随着TCN标准的形成和广泛应用,列车级和车辆级分别采用WTB和MVB两层网络架构成为动车组网络系统主流,我国速度160 km/h动力集中电动车组动力车/控制车采用了TCN网络,并同时部署了以太网,拖车则沿用了25T型客车的Lonworks网络,通过动力车/控制车设置的MVB/Lonworks网关与动力车/控制车进行通信,一定程度上减小了研发成本,希望同时借鉴国外动力集中动车组网络系统设计经验,以用户体验为导向,提高我国动力集中动车组网络系统的整体性。
猜你喜欢
海峡姐妹(2020年2期)2020-03-03 13:36:34
铁道通信信号(2018年11期)2019-01-19 01:14:54
现代临床护理(2018年5期)2018-03-07 01:00:16
制造技术与机床(2017年12期)2017-02-02 07:05:03
铁道通信信号(2016年11期)2016-06-01 12:11:26
阅读(中年级)(2016年8期)2016-05-14 04:14:55
电源技术(2016年9期)2016-02-27 09:05:42
客车技术与研究(2014年5期)2014-02-28 08:48:25
汽车与新动力(2014年5期)2014-02-27 12:10:40
电源技术(2014年9期)2014-02-27 09:03:29
