
基于四元稀疏T型阵的AUV方位估计算法
2019-03-15 01:50:06杨长生
水下无人系统学报 2019年1期
张 倩, 梁 红, 杨长生
基于四元稀疏T型阵的AUV方位估计算法
张 倩, 梁 红, 杨长生
(西北工业大学 航海学院, 陕西 西安, 710077)
小型自主式水下航行器(AUV)受体积和结构限制, 携带水听器个数有限, 但需具备较高测向精度, 而传统四元均匀T型阵虽能实现方位角和俯仰角的联合估计, 但由于阵列孔径受波长限制, 其定向精度有限。基于此, 文中以四元均匀T型阵为基础, 增加水平方向上中心阵元与1阵元的间距, 使其扩大至波长的整数倍, 中心阵元与其他阵元间距均保持半波长, 构成四元稀疏T型阵。利用基于常规波束形成的互谱测向法进行方位估计, 对2种阵型方位角及俯仰角的估计误差进行仿真对比。仿真结果表明, 同一信噪比下, 四元稀疏T型阵的方位角估计误差更小, 证实了四元稀疏T型阵的定向结果具有更高的精度, 可满足AUV以较少的阵元实现更高测向精度的要求。
自主式水下航行器; 四元稀疏T型阵; 方位估计
0 引言
水声被动定位系统主要用于对水下目标进行跟踪定位。通过对被测目标的航行噪声或目标发出的寻的信号进行接收及处理, 从而实现对目标的定位跟踪。水声被动定位系统具有隐蔽性好、作用距离远、不易被发现等特点[1]。若将水声被动定位系统搭载在自主式水下航行器(autono- mous undersea vehicle, AUV)上, 能够完成对水下声源目标的定位和探测, 通过与航行器控制系统的信息交互, 可实现自主导航、目标搜寻等功能。欧美的水下定位系统代表世界先进水平, 一系列成熟的产品被投入到军事和民用领域[2-4]。美国Sonardyne的Fusion系列产品能进行连续的定位及跟踪, 可以用于深海工程、资源开发及灾难救援等; 挪威Kongsberg Simrad的HPR408S型长基线定位系统被广泛应用到水下机器人、深拖系统等设备的导航定位; 澳大利亚Nautronix的NASDrill RS925型短基线水声定位系统具有超强的抗干扰能力。我国水声定位系统发展起步较晚, 与国外的发展水平仍存在较大的差距[5]。
由于AUV结构简单, 体积较小, 能够携带的设备资源极其有限, 因此其波达方向(direction of arrival, DOA)定向系统具有如下特征: 1) 受航行器体积限制, 所能携带水听器个数极其有限; 2) 需要实现对声源目标的2维定向。众所周知, 在水声DOA定向系统中, 阵元间距、接收基阵的孔径大小、接收基阵的阵型以及所采用的测向算法等都会影响测向精度。由于AUV携带水听器的个数固定且极其有限, 其水声定向系统的定向精度必然受到限制, 采用更优的接收基阵阵型可以在一定程度上提高定向精度。
等间隔四元T型阵能够实现2维角度估计, 且只需要4个阵元, 可满足小型AUV水声DOA定向系统以尽可能少的阵元实现2维定向的需求。但为了避免出现测向模糊的问题, 要求其阵元间距不超过系统最高工作频率所对应波长的一半, 因而阵列孔径受到限制, 定向精度也因此受限。
文中在四元均匀T型阵的基础上提出了四元稀疏T型阵, 通过增大阵元间距提高定向精度, 并结合相应的声源目标定向算法, 对连续波(continue wave, CW)信号的方位角和俯仰角进行联合估计, 其定向结果具有更高的精度, 同时估计结果具有更好的稳定性。
1 接收基阵阵型
1.1 坐标系设置
在以AUV为工作平台的水声定位系统中, 常用的坐标系设置如图1所示。


将T型阵放置在图1所示的坐标系中, 其阵元通常在x轴或y轴上, 若以原点处的阵元为参考阵元, 则各阵元信号相对于参考阵元信号的相位差由和共同决定。由于和的信息是耦合的, 因此无法仅利用某几个阵元接收信号单独对或进行估计。基于此, 文中提出了一种新的坐标系设置方式, 如图2所示。


1.2 四元均匀T型阵
在图2所示的坐标系中, 等间隔四元均匀T型阵的4个水听器按图3所示方式布放, 接收基阵安装在航行器底部, 基阵所形成平面(面)与航行器底面平行。

图3 四元均匀T型阵布放方式示意图

1.3 四元稀疏T型阵
四元均匀T型阵能够实现方位角和俯仰角的联合估计, 但为了避免出现角度模糊的问题, 要求阵元间距满足式(3), 因此阵列孔径受到限制, 测向精度也就受到限制。文中提出的四元稀疏T型阵是在均匀T型阵的基础上增大轴上任意相邻两阵元的间距, 使其等于波长的整数倍, 扩大阵列孔径也就意味着更好的测向精度。四元稀疏T型阵水听器布放方式如图4所示。
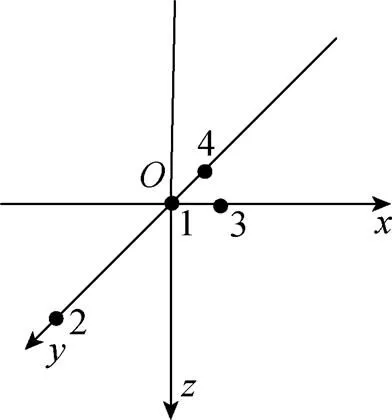
图4 四元稀疏T型阵布放方式示意图




2 方位估计算法
对于稀疏T型阵, 将常规波束形成和互谱法结合对方位角进行估计, 估计精度高于均匀T型阵, 其原理如下。
1) 两阵元接收信号具有如下相位差

对式(8)两边求增量得



以四元稀疏T型阵为接收基阵, 方位估计算法具体如下。

波束形成权值为

波束形成器的输出

完成对俯仰角的估计后, 对轴上小间距的两阵元接收信号也进行同样的处理, 此时波束形成的权值为
针对学生的差异,作业设计必须精心考虑,因人而异,分层设计,使得不同发展水平的学生都能在自己能力范围内得到有效的训练,使其在适合自己的作业中取得成功,获得轻松、愉快、满足的心理体验,从而提高语文能力。
对轴上大间距的两阵元接收信号分别进行点快速傅里叶变换(fast fourier transformation, FFT), 得


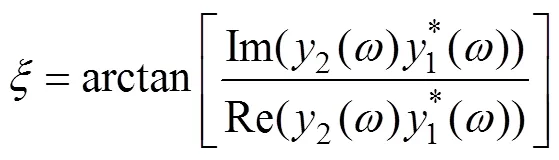
对互功率谱的相位进行计算, 得到互谱结果


上述方位估计算法的流程图见图5。
3 仿真与分析

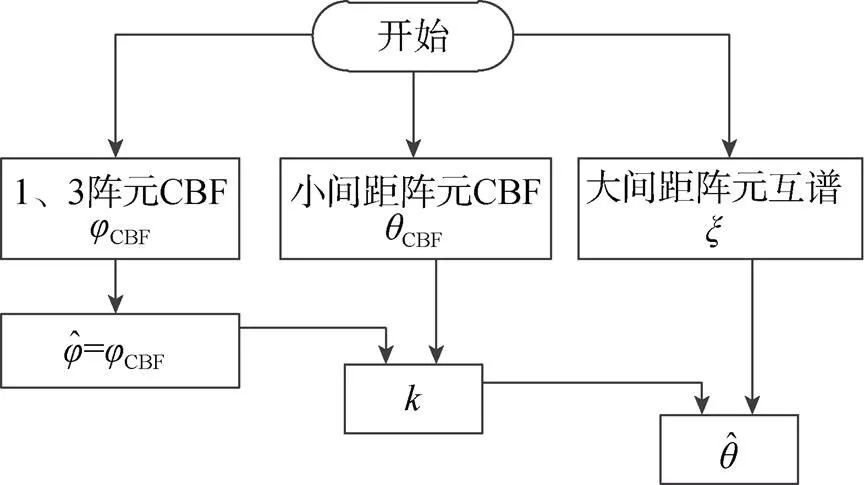
图5 四元稀疏T型阵算法流程图

图6为不同信噪比下2种阵型的估计结果比较曲线。图中, 虚线为四元均匀T型阵的估计结果, 实线为四元稀疏T型阵的估计结果。由图6可知, 在不同信噪比下, 稀疏T型阵的误差均值小于均匀T型阵误差均值, 说明稀疏T型阵的定向精度更高。

图6 不同信噪比时均匀T型阵和稀疏T型阵估计结果对比
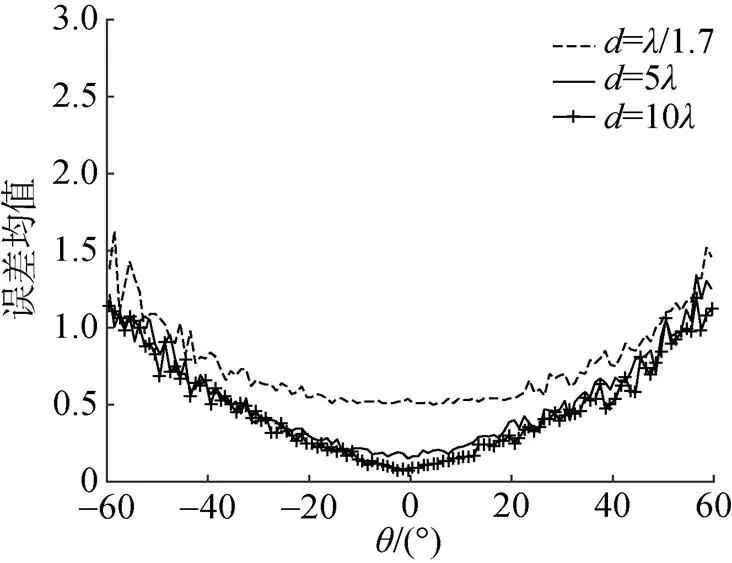
图7 不同阵元间距稀疏T型阵估计结果
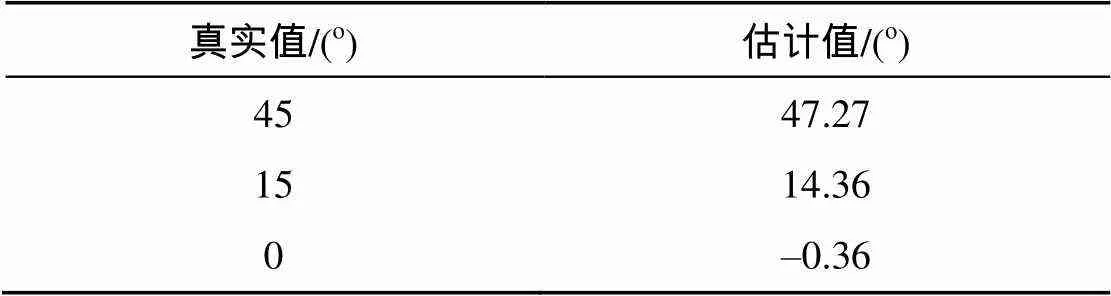
表1 稀疏T型阵实测数据估计结果
4 结束语
对于小型AUV, 由于受其体积及结构的限制, 所携带水声换能器的个数极其有限。文中在四元均匀T型阵的基础上提出了四元稀疏T型阵, 通过增大阵元间距提高定向精度, 并结合相应的声源目标定向算法, 对CW信号的方位角和俯仰角进行联合估计, 其定向结果具有更高的精度, 同时估计结果具有更好的稳定性。在水听器个数固定为4个的情况下, 文中所提出的四元稀疏T型阵能够实现方位角和俯仰角的联合估计, 并且其方位角定向精度高于四元均匀T型阵, 其能够满足小型AUV携带尽可能少的阵元实现更高测向精度的要求。在实际工程应用中, 由于水面、水底及水中各种微粒的反射, 通常需要考虑回波信号的多径效应, 文中提出的四元稀疏T型阵及其相应的定向算法, 还可针对多径问题进行优化。
[1] 周俊山, 孔大伟. 水声被动定位技术及其发展趋势[J]. 科技致富向导, 2010(30): 125, 161.
[2] 葛亮. 水声定位技术在海洋工程中的应用研究初探[D]. 青岛: 中国海洋大学, 2006.
[3] 孙万卿. 浅海水声定位技术及应用研究[D]. 青岛: 中国海洋大学, 2007.
[4] Wang B, Li Y, Huang H, et al. Target Localization in Underwater Acoustic Sensor Networks[C]//Image and Signal Processing, 2008. CISP '08. Congress on. Sanya, Hainan, China: IEEE, 2008: 68-72.
[5] 刘永佳. 基于阵列信号处理的水声被动定位技术研究[D]. 广州: 华南理工大学, 2011.
[6] 张艳芹. 基于声呐波束形成的目标方位测量精度与分辨率估计[D]. 南京: 东南大学, 2010.
[7] 李晋, 王晓庆, 陈卫东. 基于常规波束合成的分裂阵互谱定向研究[J]. 无线电工程, 2016, 46(2): 36-40.Li Jin, Wang Xiao-qing, Chen Wei-dong. Research on Cross-spectrum Direction-finding with Splitting Beam Based on Conventional Beam-forming[J]. Radio Engineering, 2016, 46(2): 36-40.
[8] 李启虎. 声呐信号处理引论[M]. 北京: 科学出版社, 2012.
[9] 田坦, 刘国枝, 孙大军. 声呐技术[M]. 哈尔滨: 哈尔滨工程大学出版社, 2000: 73-86.
[10] 刘满超, 杨建红. 四元T形阵干涉仪测向解模糊方法研究[J]. 信息通信, 2013(2): 31-33.Liu Man-chao, Yang Jian-hong. Study on the Methods of Solving Direction Finding Ambiguity in T-Array with Four Antenna[J]. Information & Communications, 2013 (2): 31-33.
Algorithm of Direction of Arrival Estimation for an AUV Based on Sparse T-Array with Four Hydrophones
ZHANG Qian, LIANG Hong, YANG Chang-sheng
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710077, China)
The number of hydrophone on a small autonomous undersea vehicle(AUV) is extremely limited by its volume and structure, however, higher accuracy of direction of arrival(DOA) is expected for such limited hydrophones. Joint es- timation of azimuth and pitch angle can be realized by traditional isometric T-array with four hydrophones, but the estimation accuracy is limited because the array aperture depends on the half-wavelength. This study proposes a sparse T-array with four hydrophones based on the isometric T-array with four hydrophones, and it enlarges the spacing between center element and No.1 element in the horizontal direction to an integer multiple of the wavelength while keeps the spacing between center element and others half- wavelength. Adopting the cross-spectrum direction-finding method based on conventional beam-forming for DOA estimation, the estimation errors of azimuth and pitch angle are simulated and compared between these two array-patterns. The results show that the azimuth estimation error of the sparse T-array is less than that of the isometric T-array under the same signal-to-noise ratio(SNR). Simulation analysis confirms that the DOA result of the sparse T-array with four hydrophones has higher accuracy, which satisfies the requirement for an AUV that using fewer elements to achieve higher DOA estimation accuracy.
autonomous undersea vehicle(AUV); sparse T-array with four hydrophones; direction of arrival(DOA) estimation
TJ630.34; TN911.7
A
2096-3920(2019)01-0025-06
10.11993/j.issn.2096-3920.2019.01.005
张倩, 梁红, 杨长生. 基于四元稀疏T型阵的AUV方位估计算法[J]. 水下无人系统学报, 2019, 27(1): 25-30.
2018-07-09;
2018-10-26.
国家自然科学基金项目资助(61379007,61771398).
张 倩(1994-), 女, 在读硕士, 主要研究方向为水下信号处理技术.
(责任编辑: 杨力军)
猜你喜欢
电声技术(2022年3期)2022-04-28 00:22:50
卷宗(2021年2期)2021-03-09 07:57:24
应用科技(2020年1期)2020-06-18 02:02:36
空间科学学报(2020年4期)2020-04-22 01:17:04
电子制作(2017年22期)2017-02-02 07:10:34
电子制作(2017年19期)2017-02-02 07:08:28
系统工程与电子技术(2016年7期)2016-08-21 13:59:18
河南科技(2015年18期)2015-11-25 08:50:14
声学技术(2014年1期)2014-06-21 06:56:34
声学技术(2014年1期)2014-06-21 06:56:22
