
潜艇转向旋回防御主动声自导鱼雷的战术意义与作战运用
2019-03-15 01:50邓新文朱文振
水下无人系统学报 2019年1期
邓新文, 朱文振, 谢 勇
潜艇转向旋回防御主动声自导鱼雷的战术意义与作战运用
邓新文, 朱文振, 谢 勇
(中国人民解放军91388部队, 广东 湛江, 524022)
潜艇转向旋回对敌鱼雷自导检测有重大的影响, 是防御声自导鱼雷攻击的主要方式。文中基于声呐方程, 分析了潜艇转向后我舷角与敌鱼雷声自导作用距离的关系, 并在分析主动声自导鱼雷运用方位走向与亮点分布进行体目标识别的原理基础上, 构建了仿真计算模型。算例表明: 潜艇转向旋回可极大地缩短敌鱼雷声自导作用距离, 在转至大、小舷角时将误导敌鱼雷体目标识别错误使其转入对抗规避弹道。最后对实战中潜艇运用转向旋回战术防御主动声自导鱼雷的实施方法进行了讨论。文中所做研究可为潜艇指挥员进行鱼雷防御作战与鱼雷设计人员进一步研究鱼雷抗干扰策略提供参考。
主动声自导鱼雷; 潜艇转向旋回; 作战运用
0 引言
近年来, 现代鱼雷随着科学技术的迅猛发展,其战术技术性能不断提高, 特别是目标智能识别与自导技术的发展, 因此各国竞相发展了多种反鱼雷装备, 以消除这种日益增长的巨大威胁[1]。但无论对抗器材怎样发展, 潜艇对抗鱼雷攻击的战术与措施都是潜艇转向旋回规避与拦截或干扰鱼雷配合实施[2-3], 潜艇转向旋回规避鱼雷仍然是潜艇进行防御鱼雷作战的重要内容, 也是潜艇提高生命力的主要手段[4-6], 因此研究潜艇转向旋回防御主动声自导鱼雷的战术意义与作战运用具有实际的军事价值。
目前关于潜艇转向旋回防御主动声自导鱼雷研究主要是围绕其对鱼雷命中概率的影响展开的[2-6], 但对鱼雷自导检测识别与战术运用的研究还较少。文中针对潜艇转向旋回防御主动声自导鱼雷时, 具有缩短敌鱼雷主动声自导作用距离与转至大、小舷角时误导敌鱼雷体目标识别错误两大战术效果, 分别进行了理论建模与仿真计算分析, 进而讨论了在实际作战中的运用。
1 缩短敌鱼雷主动声自导作用距离
1.1 理论计算模型构建
主动声呐方程是基于能量准则, 由一个基本等式来定量反应水声系统的设备性能、信道影响与目标特性三者之间的数量关系[7], 是不同环境与态势下鱼雷自导作用距离计算的逻辑基础。根据背景干扰类型的不同, 常分为噪声掩蔽下的主动声呐方程与混响掩蔽下的主动声呐方程





1.2 算例分析

图1 潜艇目标强度随方位变化图
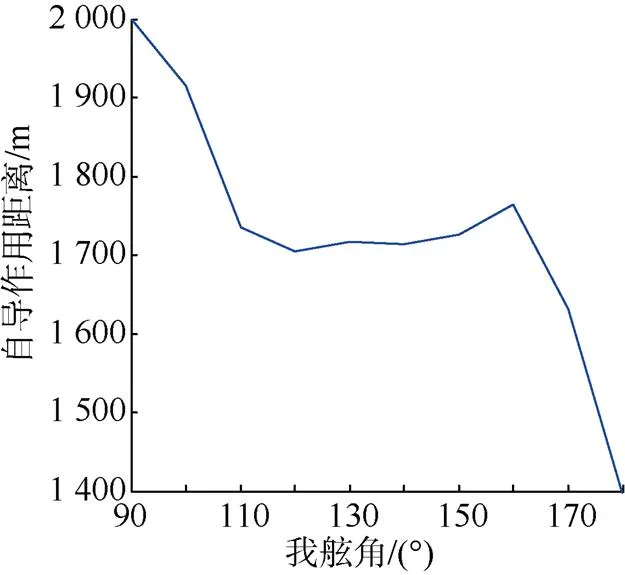
图2 不同舷角时敌鱼雷自导作用距离变化曲线
由图2可以看出, 当潜艇转向旋回将敌鱼雷置于我舷角110°以上时, 敌鱼雷自导作用距离平均减少300 m, 当敌鱼雷置于我舷角160°~180°时, 敌鱼雷自导作用距离急剧减少至1400 m左右, 小舷角的变化规律与大舷角类似。因此潜艇转向旋回可以极大地缩短敌鱼雷自导作用距离, 减少被敌鱼雷发现的概率, 从而提高本艇防御鱼雷成功率。
2 转至大、小舷角时误导敌鱼雷体目标识别错误
2.1 敌鱼雷基于方位走向进行体目标识别
2.1.1 基于方位走向识别体目标原理

2.1.2 我舷角对方位走向体目标识别的影响


图3 潜艇有效尺度示意图


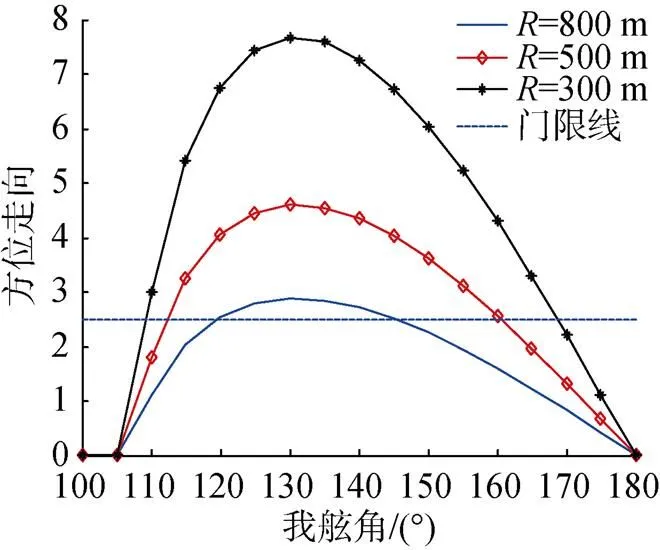
图4 不同舷角时方位走向变化曲线
2.2 敌鱼雷基于亮点分布进行体目标识别
2.2.1 基于亮点分布识别体目标原理


2.2.2 我舷角对亮点分布体目标识别的影响

假定潜艇长度, 则可根据式(9)计算出敌鱼雷在不同距离处与不同我舷角条件下的潜艇亮点空间张角, 如图6所示。
3 作战运用
由以上分析可知, 潜艇转向旋回可在来袭鱼雷较远时极大地缩短敌鱼雷主动声自导作用距离, 在来袭鱼雷已经发现本艇且本艇转至大、小舷角时将误导敌鱼雷体目标识别错误使其转入对抗规避弹道, 因此在实际作战中潜艇指挥员必须充分合理地运用潜艇转向旋回战术防御来袭鱼雷。下面分本艇已被敌鱼雷发现与未发现2种情况, 对潜艇转向旋回战术防御来袭鱼雷的作战运用予以讨论。


此外值得说明的是, 在潜艇转向旋回防御来袭鱼雷作战过程中还应积极运用声抗器材达成声抗态势, 如连续使用自航式声诱饵对来袭鱼雷实施诱骗使其尽可能远离本艇, 使用噪声干扰器对敌舰艇平台水声系统与来袭鱼雷实施噪声干扰, 另外如有可能, 本艇还应向来袭鱼雷方位应急发射鱼雷实施攻势防御。
4 结束语
针对潜艇转向旋回是防御声自导鱼雷攻击的重要方式, 通过分析声呐方程与主动声自导鱼雷体目标识别原理, 构建了相应的计算模型, 算例表明: 潜艇转向旋回具有极大地缩短敌鱼雷主动声自导作用距离与转至大、小舷角时可误导敌鱼雷体目标识别错误使其转入对抗规避弹道两大战术效果。最后对实战中潜艇运用转向旋回战术防御主动声自导鱼雷的实施方法进行了讨论, 所做研究可为潜艇指挥员进行鱼雷防御作战与鱼雷设计人员进一步研究鱼雷抗干扰策略提供参考。下一步工作将结合鱼雷攻防作战的实际情况, 考虑声抗器材与潜艇转向旋回如何协同作战及其效能评估问题。
[1] 陈春玉. 反鱼雷技术[M]. 北京: 国防工业出版社, 2006.
[2] 陈道升, 郑晓庆, 梁朝阳. 潜艇规避对声自导鱼雷命中概率的影响[J]. 测试技术学报, 2014, 28(5): 443-446.Chen Dao-sheng, Zheng Xiao-qing, Liang Zhao-yang. Effect of Hit Probability of Submarine Evasion to Acoustic Homing Torpedo[J]. Journal of Test and Measurement Technology, 2014, 28(5): 443-446.
[3] 赵洪海, 闫海蛟, 张宁. 潜艇机动对鱼雷捕获概率影响的仿真研究[J]. 计算机仿真, 2005, 22(9): 5-8.Zhao Hong-hai, Yan Hai-jiao, Zhang Ning. Simulation of the Effect of Submarine Evasion on Torpedo Capture Probility[J]. Fire Control and Command Control, 2005, 22(9): 5-8.
[4] 李本江, 李贵彬, 丁文强. 潜艇机动规避主动声自导鱼雷性能的仿真[J]. 声学与电子工程, 2009, 19(4): 41-44.Li Ben-jiang, Li Gui-bin, Ding Wen-qiang. Simulation Analysis of Performance of Submarine Guided Maneuvering Circumvention of Active Homing Torpedo[J]. Acoustics and Electronics Engineering, 2009, 19(4): 41- 44.
[5] 李斌, 高建伟, 孟范栋. 潜艇纯机动防御两枚声自导鱼雷数学模型研究[J]. 电子对抗, 2006(4): 40-43.Li Bin, Gao Jian-wei, Meng Fan-dong. A Mathematical Model for the Submarine to Maneuver Defending Double Acoustic-homing Torpedoes[J]. Electronic Warfare, 2006 (4): 40-43.
[6] 李钊, 郑援. 潜艇规避被动声自导鱼雷的航速和航向问题[J]. 火力与指挥控制, 2008, 33(3): 125-129. Li Zhao, Zheng Yuan. On Velocity and Course of Submarine to Evade Passive Homing Torpedo[J]. Fire Control and Command Control, 2008, 33(3): 125-129.
[7] 谢勇, 刘清慧, 朱文振. 负梯度声速剖面对鱼雷主动声自导反舰效果的影响[J]. 鱼雷技术, 2017, 25(1): 18-20.Xie Yong, Liu Qing-hui, Zhu Wen-zhen. Influence of Negative Gradient Sound Velocity Profile on Anti-ship Effect of Active Acoustic Homing Torpedo[J]. Torpedo Technology, 2017, 25(1): 18-20.
[8] 孟庆玉, 张静远, 宋保维. 鱼雷作战效能分析[M]. 北京: 国防工业出版社, 2003.
[9] 周德善. 鱼雷自导技术[M]. 北京: 国防工业出版社, 2008.
[10] 周明, 初磊, 朱慧. 一种反潜声自导鱼雷目标尺度识别方法研究[J]. 弹箭与制导学报, 2008, 28(5): 237-240.Zhou Ming, Chu Lei, Zhu Hui. Study on Target Dimension Recognition of Anti-submarine Homing Torpedoes[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2008, 28(5): 237-240.
[11] 汪新, 王明洲, 李忠. 分裂波束双通道方位走向的空间模糊问题[J]. 声学技术, 2013, 32(4): 290-294.Wang Xin, Wang Ming-zhuo, Li Zhong. On Spatial Ambiguity of Bearing Trend Based on Splitting Dual Beamforming Channels[J]. Technical Acoustics, 2013, 32(4): 290-294.
[12] 王明洲. 数字式水下目标识别技术研究[D]. 北京: 中国舰船研究院, 1999.
[13] 刘朝辉, 付战平, 王明洲. 基于方位走向和互谱法的水中目标识别[J]. 兵工学报, 2006, 27(5): 932-935. Liu Zhao-hui, Fu Zhan-ping, Wang Ming-zhuo. Underwater Target Identification Based on the Methods of Bearing and Cross-spectrum[J]. Acta Armamentrii, 2006, 27(5): 932-935.
[14] 周殿宝, 易红. 潜艇目标方位走向测量及识别方法研究[J]. 鱼雷技术, 2004, 12(4): 24-27. Zhou Dian-bao, Yi Hong. A Study of Submarine Target Trend Measurement and Target Discrimination[J]. Torpedo Technology, 2004, 12(4): 24-27.
[15] 李昌志, 田杰, 张扬帆. 基于亮点模型的典型水下目标回波信号仿真[J]. 应用声学, 2010, 29(3): 196-200. Li Chang-zhi, Tian Jie, Zhang Yang-fan. Simulation of Echoes from Underwater Target Based on Highlight Model[J]. Applied Acoustics, 2010, 29(3): 196-200.
[16] 石敏, 陈立纲, 蒋兴舟. 具有亮点和方位延展特征的线列阵声诱饵研究[J]. 海军工程大学学报, 2005, 17(1): 58-61. Shi Min, Chen Li-gang, Jiang Xing-zhou. On Linear Array Acoustic Bait with Light Spot and Azimuth-range Extension Feature[J]. Journal of Naval University of Engingering, 2005, 17(1): 58-61.
[17] 段立晶, 安天思, 杨宝山. 目标回声亮点分析方法[J]. 声学技术, 2012, 31(3): 318-321.Duan Li-jing, An Tian-si, Yang Bao-shan. A Study of Target Echo Light Analysis Method[J]. Technical Acoustics, 2012, 31(3): 318-321.
[18] 张江, 蒋兴舟, 陈喜. 基于方位起伏方差的目标识别方法[J]. 海军工程大学学报, 2005, 17(3): 91-94. Zhang Jiang, Jiang Xing-zhou, Chen Xi. Way of Identifying Target Based on Covariance of Bearing Fluctuation[J]. Journal of Naval University of Engineering, 2005, 17(3): 91-94.
[19] 王明洲, 郝重阳, 黄晓文. 基于相关法方位分析的水下主动目标尺度识别研究[J]. 西北工业大学学报, 2003, 21(3): 317-319.
[20] 刘晓春, 董春凯. 基于目标空间尺度特征末程识别潜艇和诱饵的方法研究[J]. 鱼雷技术, 2008, 16(5): 46-50.Liu Xiao-chun, Dong Chun-kai. A Method of Distinguishing Submarine and Acoustic Decoy Based on Features of Target Space Dimension[J]. Torpedo Technology, 2008, 16(5): 46-50.
Tactical Analysis and Operational Application of Submarine Steering Cycle to Defense Active Acoustic Homing Torpedo
DENG Xin-wen, ZHU Wen-zhen, XIE Yong
(91388thUnit, The People′s Liberation Army of China, Zhanjiang 524022, China)
The steering cycle of a submarine has great influence on homing detection of an enemy torpedo, and it is the main way to defend against an acoustic homing torpedo. Based on sonar equation, the relationship between the board angle of the submarine and the acoustic homing range of the enemy torpedo is analyzed after the submarine cycling. By analyzing the active acoustic homing torpedo’s principle of body target recognition using azimuth direction and highlight distribution, a simulation calculation model is constructed. Example shows that the submarine steering cycle can greatly shorten the acoustic homing range of the enemy torpedo, which will mislead the target identification of the enemy torpedo into the anti-evasion trajectory when the submarine is at the big or small board angles. In addition, the implementation method for a submarine to defend the active acoustic homing torpedo using steering cycle strategy is discussed. This research may provide a reference for submarine commanders to conduct torpedo defense operations and for torpedo designers to further study anti-jamming strategy of a torpedo.
active acoustic homing torpedo; submarine steering cycle; operational application
邓新文, 朱文振, 谢勇. 潜艇转向旋回防御主动声自导鱼雷的战术意义与作战运用[J]. 水下无人系统学报, 2019, 27(1): 65-70.
TJ630.34; E843
A
2096-3920(2019)01-0065-06
10.11993/j.issn.2096-3920.2019.01.011
2018-08-19;
2018-09-18.
国家自然科学基金项目资助(61601473).
邓新文(1969-), 男,高级工程师, 长期从事水中兵器试训总体技术研究.
(责任编辑: 许 妍)
猜你喜欢
小哥白尼(军事科学)(2021年8期)2021-11-22
幼儿园(2021年12期)2021-11-06
军民两用技术与产品(2021年10期)2021-03-16
兵器知识(2020年2期)2020-03-20
文萃报·周二版(2019年46期)2019-09-10
舰船电子对抗(2019年2期)2019-05-23
无人机(2017年10期)2017-07-06
宠物世界·猫迷(2016年3期)2016-04-23
小学生时代·大嘴英语(2015年7期)2015-11-23
轻兵器(2015年21期)2015-09-10
