小型自走式割草机仿形装置仿真分析与试验
2019-03-13 12:30赵振中
农家科技 2019年1期
赵振中
摘 要:山地丘陵的苜蓿收割时存在较多问题,为了改善此状况,技术人员分析了小型自走式割草机仿形装置,并进行了相关试验,得出在山区恶劣地势上工作时,应将割草机设置为滑掌长度为188毫米,拉力重力比重为0.85以及割台倾角为4.06°,前进速度为2m/s。经过优化设计后,利用此割草机在田间进行试验,发现割草难度降低了7%,且工作效率提升了75%,改进效果十分显著。
关键词:小型自走式;割草机;仿形装置;仿真分析;试验
随着我国牧草产业的快速发展,在苜蓿收割环节,割草机成为必不可少的设备,增大了市场的实际需求量。当前我国市场主要采用牵引式割草机,其工作性能较好,但更多适用于小地块作业。而小型自走式割草机操作灵活且运移方便,适用于山区丘陵作业。相较平原草地,山区丘陵的作业地面环境更为恶劣,割草机不但需要具备一定的通过性,且还应保证割草割茬的平整度。为了提升自走式割草机的工作效率,技术人员应合理设计仿形装置,确保其高效作业。本文便基于此建立了虚拟样机模型,并进行了虚拟正交试验,为割草机的仿形装置优化设计工作提供了更多的参考依据,提高了割草机的工作性能。
一、仿形装置分析
1.仿形装置结构
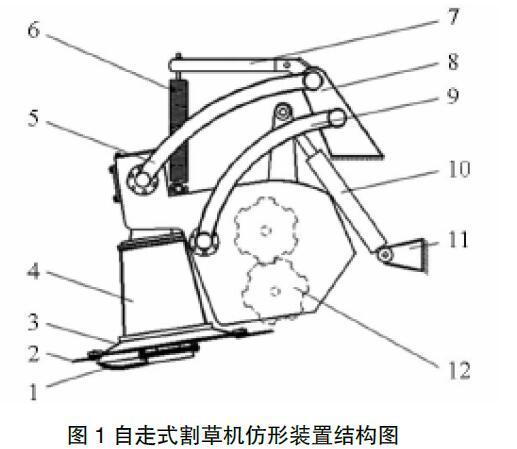
自走式割草机最为关键的装置便是仿形装置,其主要包括滑掌、连杆臂、提升液压缸以及浮动弹簧等零件,且各零件之间形成了联合仿形系统。在此系统运行期间,滑掌代表了信号输入木块,处理模块为浮动弹簧,执行模块为连杆臂,辅助支撑模块为液压缸等,下图1为自走式割草机仿形装置的基本结构。
1-滑掌;2-割刀;3-刀盘;4-拔草滚筒;5-上连杆臂;6-浮动弹簧;7-浮动弹簧支架;8-机架;9-下连杆臂;10-液压缸;11-液压缸支座;12-压扁辊
机器运行时,滑掌接触地面,割台处于半悬浮状态,承受其重力的结构为浮动弹簧。当地面不平整时,在弹簧与滑掌的作用力下,割台会上下浮动,可以确保机器稳定通过。同时,刀盘可以确保刀刃更加接近地面,有效降低了割茬高度。
2.仿形装置运动学分析
在仿形装置中,执行与辅助支撑模块决定着机构的运动规律,一是在机器进行收割时,割台会上下浮动,仿形装置开始进入工作模式,二是机器运移时,割台需要上下避障,此时其处于升降状态。当仿形装置处于工作模式时,割台以及机架等装置形成了平面四连杆结构。
二、虚拟样机建模与仿真
通过建立虚拟模型可以有效模拟农机的作业情况,本文在建立仿形装置虚拟样机时采用ADAMS动力学仿真软件,有效模拟仿形装置工作状态时与地面之间的相互作用力,为此后优化仿形装置提供参考依据。一是建立虚拟样机模拟山区丘陵的起伏地面,模拟仿形装置的工作情况。之后利用Caita建立三维模型,借助软件系统计算模型的几何尺寸与转动惯量。之后在ADAMS环境中导入三维模型,分析各零件之间的互动情况,并利用ADAMS为模型添加约束关系,实现机架、割台以及连杆臂之间的旋转移动,为滑掌与路面之间建立约束关系。
三、虚拟样机正交试验
1.试验方法
通过模拟起伏路面,了解仿形装置对收割质量的实际影响,找到最佳的设计参数,之后选择滑掌长度、割台倾角以及拉力重力比为综合评价指标,找出仿形装置的最佳设计参数。期间,技术人员在刀尖建立Marker点,测量其到路面的垂直高度确定割茬高度,并利用ADAMS后处理模块导出仿真期间的割茬高度数据,确定割茬高度与平整度的相关指标。
2.试验结果分析
试验结果表明,最大触土深度为负值,这表明割刀并未触土,绝对值为最小割茬高度。经过方差分析发现,当平均割茬高度为评价指标时,拉力重力比看做误差项,割台倾角的影响效果较大。当割茬稳定性系数为评价指标时,前进速度为误差项,滑掌长度的影响效果较为显著。当最大触土深度为评价指标时,前进速度看做误差项,滑掌长度与割台倾角的影响更为显著。
3.田间试验
通过试验测得田间地表的平整度为16.13米,而虚拟样机模型中地表平整度为69.99毫米,实际田间作业地面更为平整,虚拟样机中地表起伏更大,作业条件更为恶劣,符合实际的作业情况,仿真實验可以更好的模拟实际作业情况。通过优化发现,相同前进速度下,割茬高度降低了约7%,机器工作效率提升了75%,效果显著。
四、结语
本文分析了自走式割草机仿形装置的连杆结构,并建立了升降状态的仿形装置模型,利用虚拟样机模型进行了正交试验,得出了最佳的工作参数,即滑掌长度为188毫米,拉力重力比重为0.85以及割台倾角为4.06°,前进速度为2m/s。技术人员根据最佳参数改进了割草机,通过对比发现,相较之前的样机,小型自走式割草机割茬高度降低了7%,工作效率明显提升,为企业带来了更大的经济与社会效益。
参考文献:
[1] 双圆盘割草机切割器虚拟样机设计与试验[J]. 赵满全,张宁,杨铁军,史艳花. 农业机械学报. 2014(08) :101-105.
[2] 基与ADAMS的高速插秧机三插臂分插机构运动仿真[J]. 季顺中,李双,陈树人,卞遂清,尹建军,杨根林. 农业机械学报. 2010(S1) :82-85.
[3]基于ADAMS的丘陵山地小型玉米收获机仿真[J]. 杜岳峰,朱忠祥,毛恩荣,宋正河,高建民,朱孔贵. 农业机械学报. 2011(S1) :1-5.
猜你喜欢
民间故事选刊·上(2022年4期)2022-04-17
时代文学·上半月(2019年6期)2019-12-13
环球时报(2019-06-11)2019-06-11
诗潮(2019年1期)2019-01-25
世界汽车(2017年8期)2017-08-12
世界汽车(2017年8期)2017-08-12
世界汽车(2017年8期)2017-08-12
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
时代英语·高三(2014年5期)2014-08-26