自动化集装箱码头AGV防撞技术
2019-03-13 02:06
港口装卸 2019年1期
上海国际港务(集团)股份有限公司尚东集装箱码头分公司
1 引言
洋山深水港四期自动化码头是目前最大的自动化集装箱码头,AGV(Automated Guided Vehicle,自动导引车)取代传统集卡成为码头主要的水平运输设备[1],AGV在VMS(Vehicle Management System,车队调度系统)的调度下,自动按照既定的运行轨迹行驶,完成集装箱的中转任务。在自动化码头中,AGV动作频繁、工况复杂,需要与岸桥、场桥进行大量的交互作业。为了避免与码头上其他的设备设施发生碰撞,AGV自身的防撞技术显得格外重要,不仅要确保AGV在运行过程中的安全,也要确保在不同交互工况下各类设备及人员的安全[2]。目前,主要的单机保护措施有激光器保护、超声波传感器保护、机械防撞保护3种模式。
洋山深水港四期码头地理环境较复杂,湿度、盐雾较大,整体自然环境相对较差,对各类传感器精度影响很大。无论是激光器还是超声波传感器,在雨天雾天可能会误报故障;表面灰尘杂物、设备安装精度、码头作业震动等因素也会影响设备的正常工作,因此需要构建完善的防撞系统,保障作业安全。
2 主要防撞技术
2.1 单机保护措施
(1)激光器保护
激光防撞传感器安装时中心位置距离地面0.916 m,且处在水平位置,可以扫描-5°~185°的一个平面,扫描距离0.7 ~80 m(见图1)。采用成熟的激光-时间飞行原理及多重回波技术,可扫描某一区域,并根据区域内各个点与扫描仪的相对位置,返回其测量值。激光防撞传感器测量数据为极坐标形式,返回的为测量物体与传感器的相对距离及角度。通常情况下,激光防撞传感器感应到障碍物对应在7.5 m处减速,在1.5 m处停车。
激光器对设备安装精度要求较高,若固定螺丝松动会对其测量精度造成影响。在顶升支架区域内,反光板的安装精度要求也比较高,且激光反光板表面可能会因有吊具落下的油污等对激光器造成影响,因此也要按时清洁,保养任务比较繁杂。
(2)超声波传感器保护
超声波保护是在AGV在顶升支架区域内特有的保护。超声波传感器会检测前方一段距离内是否有障碍物,若支架上本身已有集装箱而系统调度AGV带载进入支架时,超声波传感器将检测到支架上的障碍物,控制器根据超声波传感器的返回值发出AGV急停指令,使AGV紧急停车,从而起到保护作用。
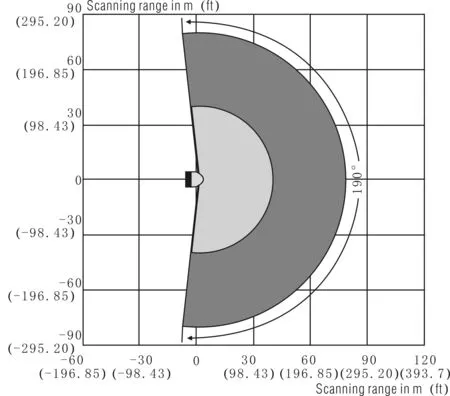
图1 激光测距仪扫描面积
(3)机械防撞保护
保险杠作为最基本的保护措施,是AGV最后一道防线,当保险杠受到外力时,常感应限位脱开,AGV车轮抱闸停车。
2.2 系统保护
AGV车队由VMS统一调度,VMS在接受TOS(Terminal Operation System,码头管理系统)发出的任务后规划路径,发送指令给AGV,AGV利用安装于车辆前后的导航天线识别埋在码头地面下的磁钉,从而获取当前位置,并结合AGV起始位置、当前车辆速度以及行驶方向等,计算当前姿态并将数据反馈给VMS,由VMS生成锁闭区。锁闭区分为自身锁闭区(Self)、已申请锁闭区(Claim)以及尝试申请锁闭区(Try Lock)3类。Self区包含了车体自身的区域,需保证任何工况下的车体覆盖;Claim区对应当前AGV已经独占的锁闭区;Try Lock区对应当前尝试申请的锁闭区。
带载的AGV质量较大,相同速度下惯性较大,所以针对不同的工况,系统对AGV的速度做出了限制(见表1)。

表1 AGV工况对应表
3 不同工况下的防撞技术应用
3.1 AGV的基本运行状态
根据AGV的运行状态,激光保护分为直行保护、斜行保护、转弯保护3种主要类型。激光保护基于多边形区域的障碍物检测,多边形区域的选择以AGV完成相关运行动作时,AGV车身外轮廓形成的包络线为原型。考虑到AGV运行中存在的位置误差以及激光器的探测误差,对轮廓包络线进行调整,可以提前检测到AGV运行路径上出现的障碍物,并根据车速、载重等信息,计算可控停车和紧急停车的临界距离。
3.2 AGV的工作环境
(1)码头前方作业区
AGV水平运输作业区布置在岸桥陆侧轨后,由装卸区、缓冲区和行驶区3个功能区组成[3](见图2)。
装卸区位于岸桥后伸距下方,装卸车道为单向布置,采用1台岸桥对应多条装卸车道的作业方式。
结合岸桥的吊具形式,装卸区的车道数定为7条,其中4条为装卸车道,3条为穿越车道。AGV在装卸区完成装卸后穿越车道转弯进入缓冲区,然后根据控制系统指令进入相应的行驶车道和指定箱区。行驶区车道采用双向布置,设6条车道,双向各3条车道(见图3)。
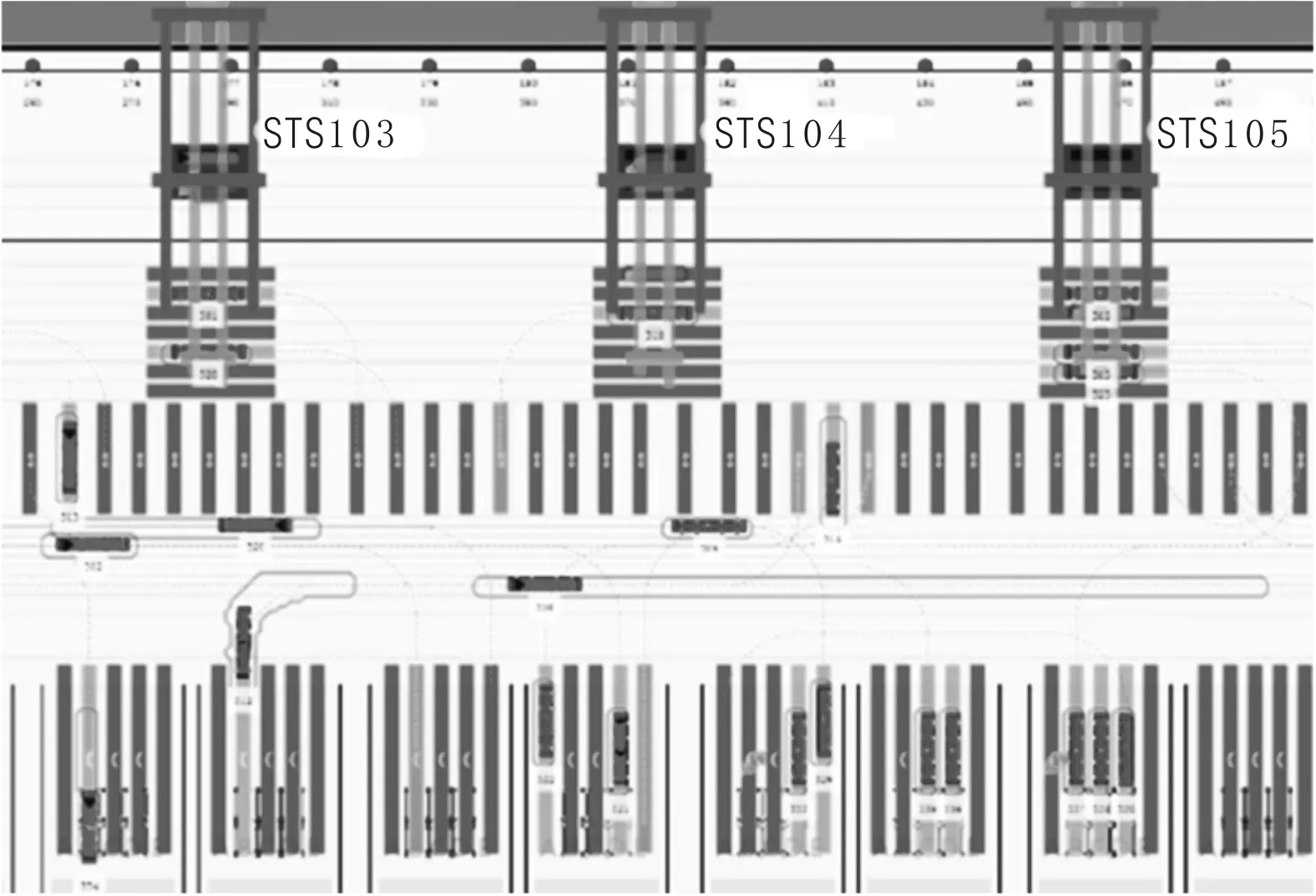
图2 码头前方作业区
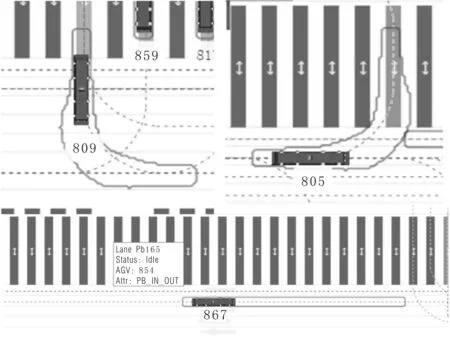
图3 AGV在码头生产区的锁闭形式
(2)自动化堆场交互区
AGV进入支架采用线性拟合及距离防撞法[4]。AGV 在支架区域的运动过程中,前后2 个180°防撞传感器可以探测到预先安装在支架侧边的防撞板。防撞传感器实时采集防撞板有效范围内的数据,并对数据进行干扰滤波后,利用线性拟合的方法求取防撞板在传感器坐标系中的直线方程。通过计算AGV 轮廓的4 个顶点到防撞板直线方程的距离,判断AGV 是否离支架太近,若太近,将触发安全模块,使AGV停车,从而避免碰撞事故的发生。
在AGV进入支架过程中,避障系统使用SICK数据,构建矩形区域,实时检测是否有障碍物在支架内部,将AGV 防撞包围盒实时投影到码头磁钉坐标系中,比较AGV 防撞包围盒与缓冲支架防撞包围盒两者之间是否存在重叠。若2个包围盒出现重叠部分,代表AGV 与缓冲支架距离太近,将会触发防撞安全控制器。
4 结语
尽管AGV防撞保护使用了多种技术和措施,但仍然存在部分盲区,如车身中间两侧等区域,因此在自动化区域内仍要尽可能地保持AGV作业环境良好,避免其在运行过程中受到影响,造成部件损坏。
猜你喜欢
动漫界·幼教365(中班)(2020年3期)2020-04-20
河北省科学院学报(2020年4期)2020-03-19
铁道通信信号(2020年9期)2020-02-06
科学(2020年6期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
小哥白尼(趣味科学)(2018年12期)2018-12-18
汽车工程师(2018年1期)2018-07-13
中国公路(2017年13期)2017-02-06
光学精密工程(2016年5期)2016-11-07
工业设计(2016年4期)2016-05-04