无动力柔性下肢外服结构设计研究
2019-03-13 02:21陈炳基邓咏梅
山东纺织科技 2019年1期
陈炳基,邓咏梅
(西安工程大学 服装与艺术设计学院,陕西 西安 710048)
1 引言
根据国家统计局2006年第二次全国残疾人抽样调查结果显示,中国残疾人数达到8296万,占总人数的6.34%[1],其中中风是造成长期残疾的主要原因,在全世界超过3300万中风患者中有三分之一来自中国,且中国中风发病率还在以10%的速度上升[2]。《中国心血管病报告2016》推算中国脑卒中患者高达1300万,其中约1/3的脑卒中幸存者由于神经功能损伤导致偏瘫,丧失独立运动能力[3]。传统治疗方法大多局限于物理疗法,需要长时间的运动恢复,但效果却不尽人意,有超过80%的中风患者在经过大量治疗后依旧有步态障碍[4]。相对而言,将可穿戴下肢外服应用于运动康复领域,借助设备辅助患者进行恢复的方法效果显著。
2015年Nature杂志中对柔性外服机器人做了如下定义:“柔性外服机器人是由柔性材料组成、能够完成自主行为的系统”[5]。柔性可穿戴下肢外服设备是一种穿戴于人体上,随时为人体提供助力、协助人体行走的助力装置。在医疗康复领域,下肢外服多应用于脑中风患者的步态康复,使其能够实现或接近正常行走,与使用者预期动作有较高的吻合度,具有更强的适应性。相较于传统的步态修复装置,它可以在不需要理疗师全程监护的情况下,辅助使用者进行步态康复。同时,也可以通过穿戴下肢外服设备来增加负载量,为体力劳动者提供帮助,减少人体的损伤。除此之外,它还具有以下优点:总体质量轻且弹性好,穿戴之后在人体上的附加质量小,进而降低由于附加质量引起的代谢消耗;助力系统具有一定的弹性且仅对附加关节产生牵引力,对穿戴者的自然步态、关节活动范围影响较小;柔性助力系统体积小,能够穿戴于正常服装之下,有助于推动外服设备的日常化应用。
本文基于人体解剖学、人体生物力学以及人体与服装的关系,研究设计了一种基于功能型织物的柔性外服本体外衣,以期能够辅助患者进行更加自主的下肢运动和康复。并通过文献查阅对其可产生的助力效果进行评估分析。最后基于柔性外服的低成本、低重量、高便携性展望了柔性可穿戴下肢外服设备的发展趋势。
2 柔性可穿戴外服原型设计
通过分析美国哈佛大学生物实验室的Exosuit系列装置[6,7],在柔性外服本体结构设计方面采用柔顺、轻便、舒适的功能型纺织品;基于人体解剖学对下肢主要关节部位(下躯干、髋关节、大腿、膝关节、小腿、踝关节、足等)肌群进行分析,选出合适的助力部位。最终,依据柔性外服设计的原则,并结合人体与服装的关系,基于人体解剖学,人体生物力学进行外服原型的结构设计,为后续原型实现提供条件。
2.1 下肢辅助关节部位的选取
首先基于人体解剖学对人体按照三个基本平面与基本轴进行划分[8],如图1所示,依据该人体划分方法,下肢关节的运动可以分为伸展/屈曲运动、外展/内收运动和外旋/内旋运动。其次,肌肉的伸缩是人体一切运动的源动力,因此研究人体肌肉的运动情况对于研究人体运动有着重要意义。王林等人[10]利用数字仿真软件LifeMOD对人体步行过程进行仿真分析,得出下肢各个肌肉的力曲线,并通过分析发现尽管在运动过程中各个肌肉的出力情况不同,但大都遵循先增后减,左右交替增减的规律。大腿部位的股直肌出力最大,是人体步行过程中最为重要的肌肉;胫前肌的发力情况最为复杂,对人体步行的稳定与协调有着重要意义。其中各关键肌群与人体部位的对应关系如图2所示。综上所述,在结构设计中,将主要参考相关部位的肌肉受力延展走向,进行各个模块的织物结构设计,同时选定膝关节及踝关节作为此次研究的主要关节。
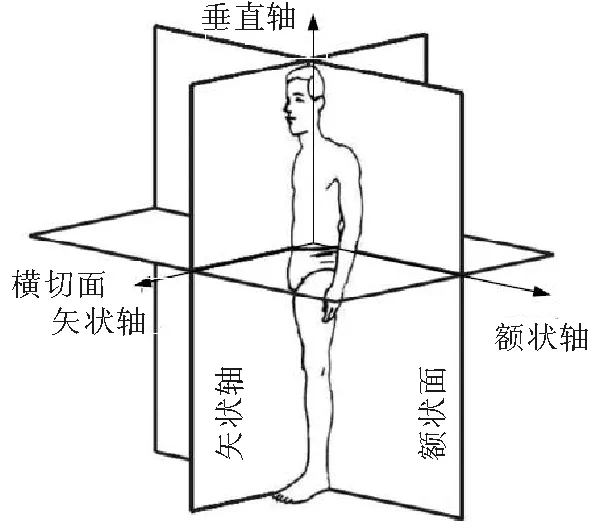
图1 人体参考平面详图[9]
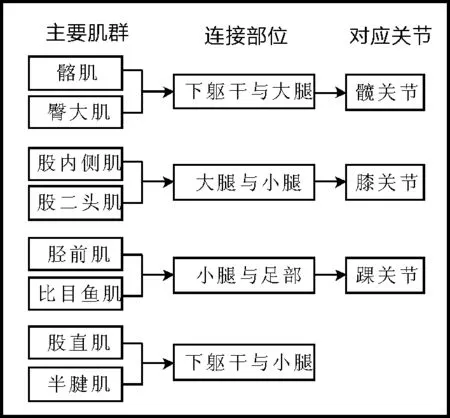
图2 下肢关键肌群与人体关节对应关系
2.2 柔性可穿戴外服结构设计原则
在可穿戴柔性外服的设计中,要实现各个部件之间位移的最小化,将辅助力量最大限度的传递给人体,同时还要尽可能使人体感觉到穿着舒适。哈佛大学生物研究所B. T. Quinlivan 等人[7]在文章中提出了关于柔性外服设备的六项设计原则:利用人体几何学最大限度地提升结构刚度;将设备固定在人体刚度最大的部位;材料在具有高硬度的前提下不失舒适性;辅助力的传递路径是符合人体结构的最短距离;尽量减小衣服和人之间的剪切力以提高舒适度;最大限度地利用人体与外衣的接触面积减小压力;最大限度地减小人体与外服之间的摩擦力等。
在这样的前提下,此次研究所涉及的柔性外服是由功能织物通过立体裁剪和平面裁剪的方法剪裁而成,在保证安全性和舒适性的前提下,可以牢固地固定在腰部、小腿、脚踝等部位。
2.3 柔性可穿戴外服原型整体结构设计
基于人体骨骼肌肉组织的分布延展形态以及人体生物力学特征,在人体与服装相互关系的基础上,进行外服原型结构设计,为后续原型的实现以及实验验证提供条件。外服原型设计规格尺寸如表1所示,整体结构设计图如图3所示,所采用的人体号型为175/96A。
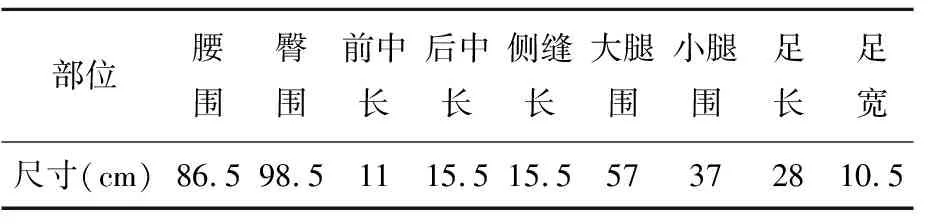
表1 柔性外服原型结构规格尺寸设计
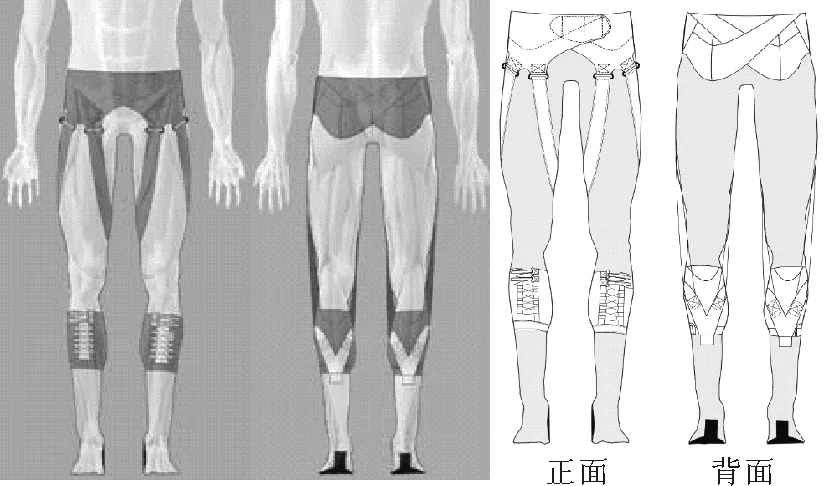
图3 柔性外服整体结构设计图
2.4 柔性可穿戴外服原型细部结构设计
2.4.1腰带部位结构设计
以人体腰围线为基准,并结合髋关节、大腿关节自由度进行结构设计,以符合人体的运动规则;考虑到髋关节作为内置关节,其连接肌肉难以表征,因此在结构设计时采用与其应力路径相一致的结构进行力的传递和牵引;臀大肌作为连接下躯干和大腿的重要肌肉,其应力传递对下肢关节运动有着重要的影响,因此背面主要依照人体形态,基于臀大肌的生物力学延展特征进行结构设计。最终腰带部位结构设计如图4所示。
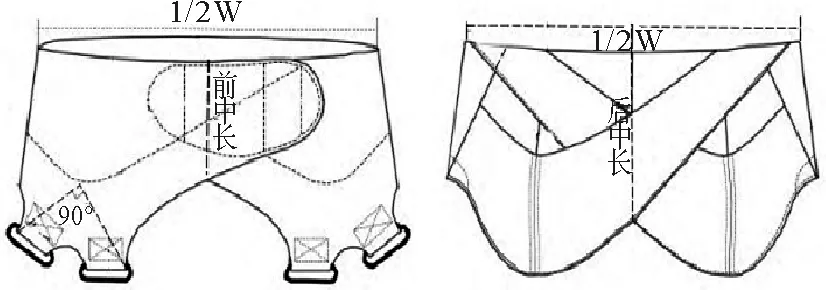
图4 腰带结构示意图
2.4.2垂直连接带部位结构设计
以下肢缝匠肌和股外侧肌的运动延展为参照,连接腰带和小腿环带,满足柔性外服设备在受力传递路径上符合人体结构最短距离,并且在其连接部位采用魔术贴进行粘合,可调节适体程度,满足舒适性要求。同时,由于连接带的牵扯使得小腿环带的固定更加牢固,可减小部件之间的相对位移,其结构如图5所示。
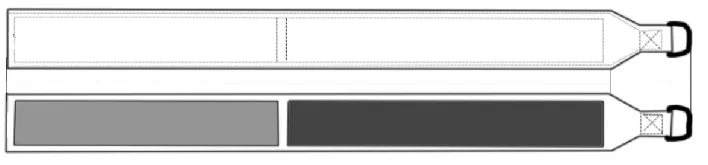
图5 垂直连接带结构示意图
2.4.3小腿环带部位结构设计
小腿环带部位结构与人体小腿部位的廓形相一致,符合人体结构,其主要作用是将与鞋子相连的织物弹性驱动固定在身体上,避免在运动过程中产生位移,减少柔性织物结构与人体之间的剪切力,进而实现更好的助力效果。整个小腿环带的设计与股二头肌在此部位的形态相一致,其结构如图6所示。
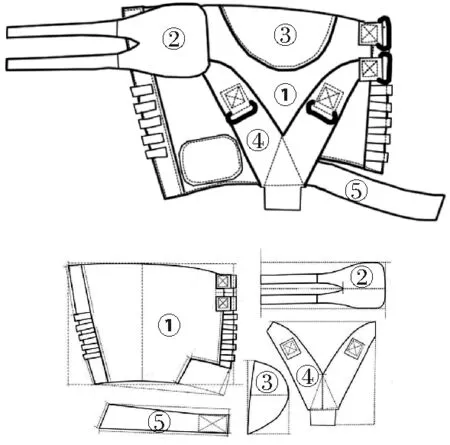
图6 小腿带结构示意图
2.4.4足底穿戴固定装置结构设计
在脚部设计足底穿戴固定装置,以便将织物弹性驱动和小腿环带相连接,减少部件位移,进而在步态运动过程中对踝关节产生助力,其设计图如图7所示。
整套柔性设备在连接处都是采用魔术贴、尼龙搭扣以及尼龙绳,可提高设备与人体结合的紧密程度,更好地贴合人体,减小各部位之间的相互移动,满足舒适性的要求。
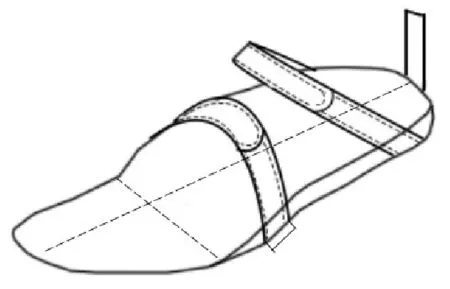
图7 足底穿戴固定装置
3 柔性可穿戴外服原型实现
此次研究的外服主要包括了腰带、垂直连接带、小腿环带以及踝布带等,采用平纹棉织物、涤棉织物和夹网布(如图8所示)等面辅料制成。平纹棉织物、涤棉织物的弹性、耐磨性和舒适性较好,而PVC夹网布主要是为了增加面料强度并实现较好的支撑效果。
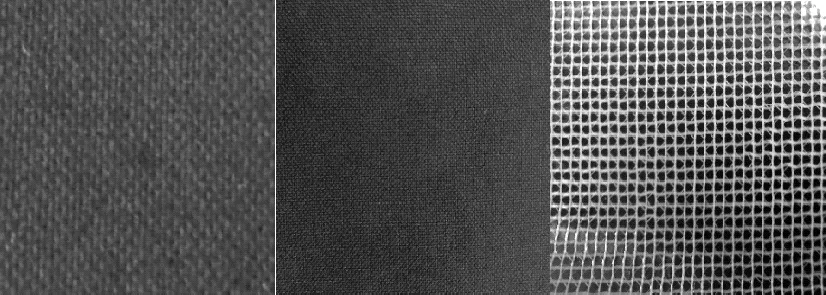
图8 服用面料
3.1 织物规格
织物的规格主要包括面料成分、单位面积干重、织物厚度和织物密度。对本研究中所采用的主要面料的性能进行分析,其规格参数如表2所示。
3.2 柔性可穿戴外服设备原型的实现
基于上文涉及的面料以及相关部位结构设计,最终通过采用立体裁剪和平面裁剪相结合的方法实现柔性可穿戴外服原型,其实物图如图9所示。
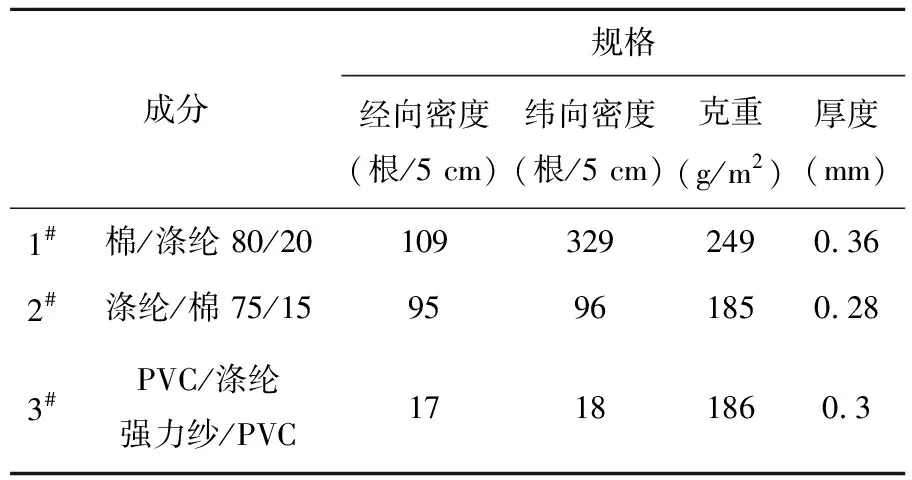
表2 织物基本规格参数统计
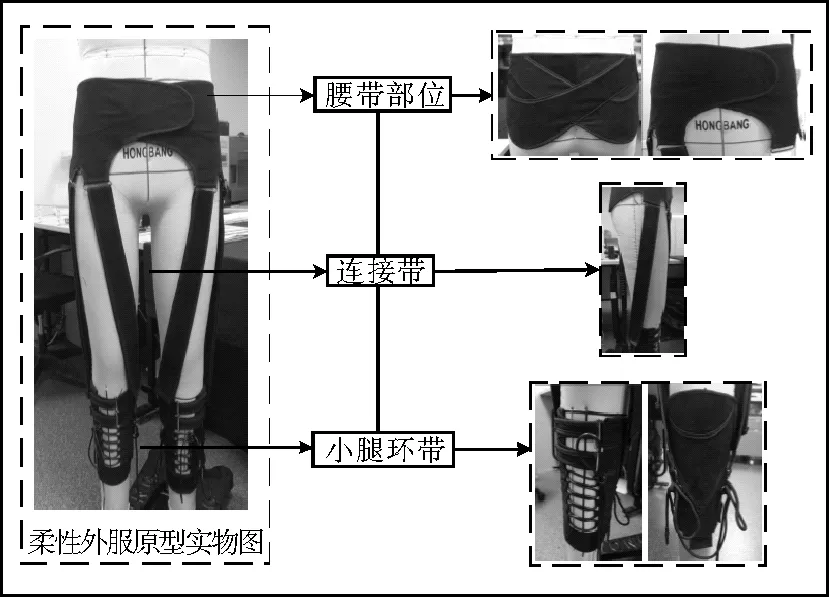
图9 柔性外服原型实物图
4 效果评估分析
本章节内容主要通过对现有柔性外服设备助力效果进行分析,得到柔性外服进行助力所需的条件,进而对柔性外服原型能够产生的助力效果进行预测。
首先在穿戴外服设备进行助力行走运动时,设备本身的重量人也会对人体造成额外的能耗。L. M. Mooney等人[11]通过实验对人体运动时穿戴外服设备与否进行对比,以及对运动能量消耗的对比计算,最终得到当外服系统(含电源驱动)的整体质量低于5 kg时,对人体运动造成的额外能耗最低。美国国防高级研究计划局研制的“勇士织衣”集成化智能柔性外服作战系统质量不到9kg,可以减少25%代谢消耗[12]。经过测试,本文实验所制作的这套设备总体重量(不含电源驱动)为1 kg,满足重量要求。
踝关节是人体步态运动的主要关节,在步态周期内对踝关节提供助力,会对人体整个步态运动起到有效的辅助作用。Quinlivan团队所研制的电极牵引柔性外服设备,通过穿着对比实验发现在踝关节施加助力时,人体的代谢能量消耗比正常情况下有显著的减少,其大致范围在正常人体能耗的3.59%~22.83%[7]。由此,本次实验拟在踝关节添加柔性织物弹力驱动以便在人体步态运动中为其提供一定助力,进而辅助行走,达到减少一定能耗的目的。
总之,通过相关穿着评价实验,本次研制的柔性外服原型是可以对人体步态运动产生辅助作用,但是其助力效果仅低于正常能耗的3.59%,因此在后续的研究实验中,要对其结构以及驱动设备进行进一步研发,以便为穿戴者提供更大的帮助。
5 结语
本文基于人体下肢结构设计了一种具有步态辅助功能的仿生柔性外服,并对其助力效果进行了预测评估。初步结果表明,这套外服可以对穿戴者的步态运动提供助力,但其具体的助力效果还需要通过后续完善并进行穿着实验验证。因此,本次研究主要是提供了概念验证,并激发在此领域的进一步努力。未来的工作将对柔性外服的结构进行进一步优化,使其能够提供更强的力量辅助,并且进行相关柔性驱动设备的研发,为穿戴者提供更大的帮助。最后,计划在后续设备完善的情况下,进行广泛的人体实验,以证明其在辅助运动障碍患者进行步态康复方面的潜力。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
小资CHIC!ELEGANCE(2021年45期)2021-01-11
电子制作(2018年18期)2018-11-14
英美文学研究论丛(2018年2期)2018-08-27
自动化学报(2018年6期)2018-07-23
剑南文学(2016年14期)2016-08-22
中华骨与关节外科杂志(2016年3期)2016-05-17