
激光陀螺数字机抖电路优化
2019-03-13 03:45徐步峰罗延明滕晓燕马文宏
导航定位与授时 2019年2期
徐步峰,罗延明,滕晓燕, 马文宏,郑 毅
(1.北京自动化控制设备研究所,北京 100074;2.中国航天科工飞航技术研究院,北京 100074)
0 引言
基于Sagnac效应[1]工作的激光陀螺作为高精度捷联惯性系统的首选传感器,具有精度高、性能稳定、抗干扰能力强、动态范围宽、可靠性高、启动迅速、寿命长等优势[2-3],如今被应用在航天[4]、航空[5]、航海[6-8]、定位导航[9-11]等各个方面。
闭锁效应[12]是激光陀螺产生误差的主要因素之一,为了克服锁区对激光陀螺的影响,需要让激光陀螺工作在偏频状态。目前,实现偏频的方法主要有四种,分别为机械抖动偏频、磁镜交变偏频、速度偏频与四频差动。其中,机械抖动偏频[13-14]是最早实际应用的偏频技术,同时机抖偏频陀螺也是目前广泛使用的激光陀螺之一,其核心思想是采用小振幅高速机械抖动装置强迫环形激光器绕垂直于谐振腔环路平面的轴线来回转动,为谐振腔内相向行波对提供快速交变偏频[15]。
传统的模拟机抖控制系统采用正弦波驱动,该系统规模大、易受温度影响、可控性与可拓展性差,如今可用数字机抖控制系统代替来克服这些不足。
数字机抖控制[16]采用方波驱动,与正弦驱动相比,两种驱动模式产生的效果相近,在驱动幅度相等的情况下,方波驱动相较于正弦驱动能够得到更大的抖动响应,功耗更小。数字机械抖动电路通常由4个基本功能电路单元组成,分别为:鉴相电路单元、鉴幅电路单元、机抖驱动逻辑电路单元和功率放大电路单元。目前采用的数字机抖控制电路为保证电路安全,普遍存在耦合电容器件,导致电路的输出信号无法及时响应输入信号的变化,限制了驱动信号占空比的调节范围,从而限制了数字机抖的精确抖动控制和噪声注入控制。同时,在电路的实际应用中发现,抖轮的压电陶瓷上存在反向充电电压,从而导致抖轮无法工作在理想的自由振荡状态,进而达不到最佳的抖动控制效果。针对以上2个目前数字机抖控制电路中存在的不足,本文提出了去除耦合电容器件,添加逻辑保护电路,同时采用双向放电的改进方案,并对改进方案进行了仿真分析和试验验证。
1 数字机械抖动控制原理
数字机抖控制电路的原理框图如图1所示。
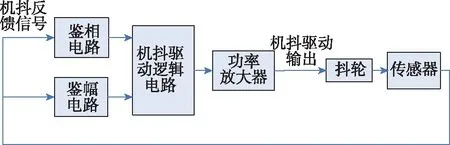
图1 数字机抖电路原理框图Fig.1 Digital dithered control circuit schematic
鉴相电路的功能是从机抖反馈信号中解调出机抖的谐振频率和过零点,以此作为机抖驱动逻辑控制的依据,确保陀螺能够在谐振频率点附近进行抖动。
鉴幅电路用于检测机抖反馈信号的幅度信息,该信息为机抖幅度的反馈信号,参与幅度的闭环控制。若机抖幅度减小,则增大机抖驱动方波信号的占空比,增加驱动信号的作用时间,机抖幅度将增大;若机抖幅度增大,则减小机抖驱动方波信号的占空比,缩短驱动信号的作用时间,机抖幅度将减小,以此来实现机抖幅度的稳定控制。
机抖控制回路的工作分为起动和闭环2个过程。起动过程中,机抖驱动逻辑电路首先发出驱动信号作为抖轮的激励信号,频率接近谐振频率。在激励信号的作用下,抖动轮开始抖动,激励信号的作用时间结束后,抖动轮因惯性作用会保持抖动,这时的抖动为无激励的自由振荡,自由振荡的频率接近谐振频率。通过位置传感器从抖轮上采集机抖反馈信号,经信号调理后输入鉴相电路与鉴幅电路,机抖驱动逻辑电路通过相位信息和幅度信息计算输出相应频率和占空比的数字驱动信号,经功率放大器放大得到机抖驱动信号,作用于抖轮。当抖轮工作在谐振点时,抖动效率最高;当工作点偏离谐振频率时,抖动效率会急剧降低,该电路可以保证抖动幅度保持稳定,抖动频率稳定在谐振频率。
2 功率放大电路
机抖控制电路中,功率放大电路的功能是将机抖驱动逻辑电路输出的驱动信号电平放大为±65V。功率放大电路由推挽式放大电路实现,目前普遍采用的功率放大电路如图2所示。

图2 功率放大电路Fig.2 Power amplifier circuit
从图2中可以看出,OUTH、OUTL和MUTE信号路径上都存在一个耦合电容,使3个信号均在边沿时有效,这样可以防止上电后OUTH、OUTL和MUTE信号的状态不固定导致误导通。电路采用的是两级放大形式,三极管Q3与Q4实现一级放大,三极管Q5与Q6实现二级放大。从图2中可知,当OUTH信号与OUTL信号都为高时,三极管Q3导通,三极管Q4截止,机抖驱动输出信号为+65V;当OUTH信号与OUTL信号都为低时,三极管Q4导通,三极管Q3截止,此时输出为-65V。抖轮上贴有压电陶瓷,与电片的正负极相连,通电后压电陶瓷将发生伸缩变形,以此来实现抖轮的抖动。要使抖轮工作在自由振荡的状态,需要将压电陶瓷上存储的电荷进行释放,故功率放大电路中需要加入放电回路。图2中,三极管Q1与Q2组成了放电回路。三极管Q1构成正向电荷放电回路,三极管Q2构成负向电荷放电回路。控制信号时序如图3所示。

图3 控制信号时序图Fig.3 Control signal timing diagram
在实际的方波驱动中,因机抖驱动信号通路上采用了电容耦合[17],限制了机抖驱动信号占空比的调节范围,无法适应随机噪声注入等需要大范围调整占空比的应用场合。同时,由于抖轮采用压电陶瓷驱动,使电路在实际工作中输出的驱动存在反向充电的现象,同样会影响占空比的精确调节,实测波形如图4所示。

图4 实测机抖驱动输出信号Fig.4 Waveform of actual dithered driving output
3 优化设计

为了解决机抖驱动信号存在反向充电的问题,首先分析该现象产生的原因。由于电路中的放电回路是分时工作的,当电压由+65V变为0V时,正向电荷放电回路工作,释放正向电荷;当电压由-65V变为0V时,负向电荷放电回路工作,释放负向电荷。当压电陶瓷[18-19]在工作中产生反向电荷时,没有释放途径,因此产生了该现象。若2个放电回路同时工作,当压电陶瓷出现反向电荷时,通过放电回路可将其释放,这就可以避免反向充电现象的产生。用2个信号分别控制2个放电回路,正向电荷放电回路由MUTEH信号控制,负向电荷放电回路由MUTEL信号控制。优化后的电路图与时序图分别如图5与图6所示。
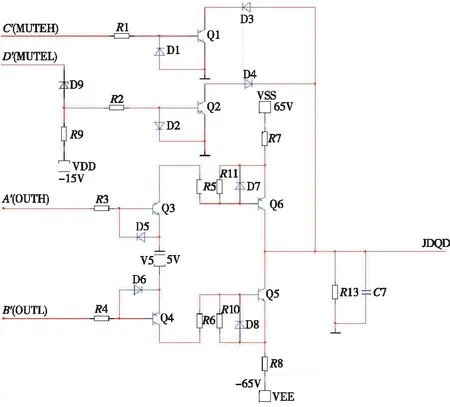
图5 优化后的数字机抖电路Fig.5 Improved dithered circuit

图6 优化后控制信号时序图Fig.6 Improved signal timing diagram
4 仿真分析和试验验证
在Multisim仿真平台上对数字机抖电路进行了建模仿真。图7和图8所示分别为放电回路优化前后的仿真波形, 图中通道1皆为机抖驱动输出信号,图7的通道2为MUTE信号,图8的通道2为MUTEH信号。

图7 优化前机抖驱动输出信号波形Fig.7 Waveform of the original dithered driving circuit output

图8 优化后机抖驱动输出信号波形Fig.8 Improved dithered driving circuit output waveform
图7中,机抖驱动输出信号存在明显的反向充电现象。对比图7与图8的机抖驱动输出波形可以看出,优化后两路放电电路同时工作可有效避免反向充电的发生。
图9与图10所示分别为优化前后机抖控制信号占空比较小时机抖驱动的输出信号波形。图中通道1为机抖驱动输出信号,通道2为机抖控制信号OUTH。从图9中可以看出,优化前由于耦合电容的作用,机抖驱动输出信号不能与机抖控制信号同步,无法实现小占空比的机抖控制。

图9 优化前机抖驱动电路小占空比输出波形Fig.9 Waveform of the original dithed driving circuit output with small duty cycle
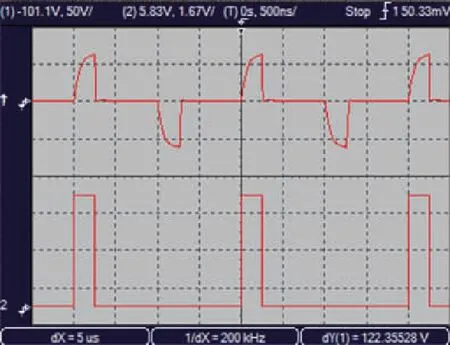
图10 优化后机抖驱动电路小占空比输出波形图Fig.10 Improved dithered driving circuit output waveform with small duty
从图10中可以看出,优化后的电路由于不存在耦合电容的影响,当机抖控制信号占空比较小时,机抖驱动输出信号也能够很好地与机抖控制信号同步,可以实现小占空比的机抖控制。
图11所示为优化后数字机抖电路的实测输出波形。与仿真结果一致,进一步证明了优化方法的有效性。

图11 优化后的实测机抖驱动输出波形Fig.11 Measured dithered driving output waveform after optimization
5 结论
1)通过去掉耦合电容同时增加防共态导通保护逻辑的方式,解决了机抖驱动信号占空比调节范围窄的问题,可以实现精确的机抖控制和数字噪声注入控制。
2)通过采用双向放电的控制方式,解决了机抖驱动压电陶瓷存在反向充电电压的问题,使陀螺抖动可以达到比较理想的自由振荡状态。
3)仿真和试验结果证明,本文提出的优化设计方法可行,效果明显。通过系统级试验表明,精确的机抖控制和数字噪声注入控制能够将激光陀螺精度提高3倍以上,可应用于高精度的激光陀螺机抖控制。
猜你喜欢
中学生数理化(高中版.高考理化)(2020年10期)2020-10-27
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
快乐语文(2018年36期)2018-03-12
新高考·高一物理(2016年7期)2017-01-23
卷宗(2016年10期)2017-01-21
故事作文·高年级(2016年6期)2016-06-21
电脑知识与技术(2016年11期)2016-06-17
新高考·高一物理(2015年6期)2015-09-28
新高考·高一物理(2015年6期)2015-09-28
