
一种车灯实用型LED诊断电路设计
2019-03-11 04:38覃思宇徐宝奇汤海莲蒋敏
汽车零部件 2019年2期
覃思宇,徐宝奇,汤海莲,蒋敏
(常州星宇车灯股份有限公司,江苏常州 213022)
0 引言
LED作为一种节能、环保、高效的照明光源,已经在各个行业中应用。在汽车照明领域,车灯造型越来越多,设计方案越来越独特,而LED光源分布灵活能满足各种各样的要求,因而应用也越来越广。一般在前照灯中,转向灯常用反射镜或光导的方案,其中光导方案由于其光色均匀、节约空间且能做出特殊造型,得到了较大的重视。本文作者主要结合某汽车厂的设计要求,给出一种低成本的带开路故障诊断反馈的光导型转向灯驱动方案。
1 方案设计
针对某汽车厂一款车型的前大灯转向灯使用光导设计,它位于前大灯下部,从左部延伸至右部。此外汽车厂还要求实现转向灯故障反馈功能,即转向灯功能正常时,转向灯诊断线在100 ms内反馈高电平;转向灯功能不正常时,转向灯需在100 ms内反馈低电平。
由于使用光导设计,光学上要求LED光源亮度高,因此需要光强高、功率大的LED来实现该功能。根据配光要求,LED选用3颗飞利浦luxon F Plus系列PC amber,单颗LED电流达到1 000 mA,电压降2.98 V。表1是该款LED的一些基本参数。图1是不同温度下LED电压与电流的关系。

表1 某款LED基本参数
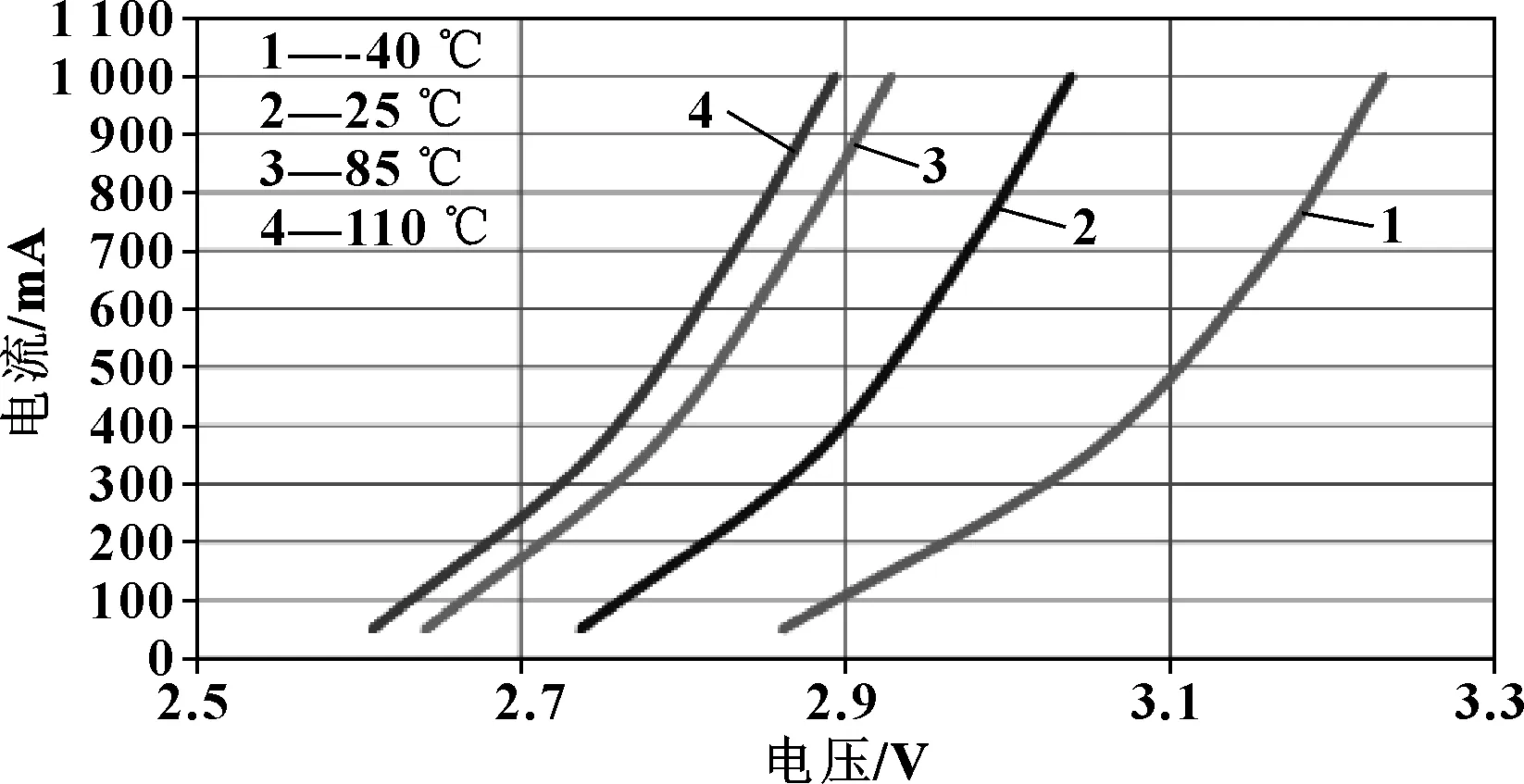
图1 不同温度下LED电压与电流的关系
1.1 LED驱动方案
首先分析LED电路驱动方案。一般汽车供电源是蓄电池,则车灯的供电源为直流恒压源,因此,车灯上常用的LED驱动方案包括电阻式驱动、恒流式驱动和开关电源驱动。
(1)电阻式驱动
图2是电阻式驱动电路图。LED与电阻串联接入电路中,通过选取合适的等效电阻值控制LED串的电流,从而控制LED的光强。在这种驱动方式下,电流受电压变化影响比较大,在9~16 V工作电压下,明暗变化比较大,且在大电流大功率情况下,电阻数量多,占用线路板空间大。
(2)恒流式驱动
图3是恒流式驱动电路图。该电路利用三极管或mos管集电极和发射极间导通状态受基级电流或电压控制的特性,通过电阻和稳压管给三极管或mos管基极提供稳定的电平和电流,从而保证三极管稳定的导通状态,实现LED的恒流控制。这种驱动模式在9~16 V工作电压下,电流相对稳定,且使用的元件数量较少,节约生产贴装时间。
图2 电阻式驱动电路图

图3 恒流式驱动电路图
(3)开关电源驱动
开关电源驱动电路是通过电感、开关管、二极管及电容等元件的不同拓扑,将输入电压调整为负载所需电压的电路。根据芯片类型和应用场合不同,分为芯片内置拓扑驱动和芯片外搭拓扑驱动,如图4、图5所示。
芯片外搭拓扑驱动通过利用芯片控制外搭拓扑电路的开关频率,来控制电路的电压和电流,这种电路感性容性元件多,且有高频信号,容易对外产生辐射干扰,对电路走线要求高,一般需要有屏蔽措施。由于元件可选择,因此该方案可用在负载电流大、功率大的场合。
芯片内置拓扑驱动中,芯片集成了开关电源的拓扑结构,减少了片外元件的使用,电路连接较简单易行,且辐射干扰较小。但由于芯片本身功率有限,能驱动的LED负载功率较小。
由于芯片以及功率元件的价格较其他常规元件高,因此开关电源方案成本比较大。
在该设计中,LED电压2.98 V,电流1 000 mA,3颗LED功率近9 W。综合成本和功能考虑,选择三极管恒流式方案作为LED驱动电路,如图6所示。

图4 芯片内置拓扑驱动

图5 芯片外搭拓扑驱动

图6 三极管恒流式LED驱动电路
1.2 诊断反馈方案
汽车厂要求转向灯功能正常时,诊断线反馈高电平;转向灯功能不正常时,需反馈低电平。在汽车正常工作状态下,电源电压13.5 V,利用如图7所示的方案对LED工作状况进行监控。即,当LED正常工作时,三极管Q3基极是高电平,Q3导通,使得三极管Q2基极为低电平,Q2截止,因此FeedBack端输出高电平。反之,当LED断路时,三极管Q3基极是低电平,Q3截止,使得三极管Q2基极为高电平,Q2导通,因此FeedBack端输出低电平。
由于汽车工作电压为9~16 V,当工作电压为9 V时,不管LED是否正常工作,Q3基极始终处于低电平,这样使得Q3处于截止状态,FeedBack端输出低电平,出现误报警的情况。考虑从监控单颗LED电压入手,使得工作电压为9 V时不出现误报警情况。

图7 诊断反馈方案1
图8是修改后的反馈方案。当LED正常工作时,根据电压电流关系图,工作电压为2.5~3.3 V,此时经过运算放大电路将LED两端电压差值采样出来,通过比较器与两个基准电压3.3和2.5 V比较。当采样电压介于2.5~3.3 V之间时,两个比较器都输出低电平,末端三极管基极为低电平,三极管截止,FeedBack输出高电平;当LED串联的前两颗LED断路时,采样电压为0,则电压基准为2.5 V的比较器输出高电平,末端三极管基极则为高电平,三极管导通,FeedBack输出低电平;同理,当LED串联的第三颗LED断路时,采样电压大于3.3 V,则电压基准为3.3 V的比较器输出高电平,末端三极管基极则为高电平,三极管导通,FeedBack输出低电平。根据以上电路逻辑实现了LED驱动电路的诊断功能,且能在9 V供电的情况下实现。

图8 诊断反馈方案2
2 仿真验证
文中使用Cadence中PSPice的模块搭建原理图电路,并分别对驱动电路模块和反馈功能进行仿真,检验其可行性。图9为电路仿真架构图。

图9 电路仿真架构图
图10为驱动电路模块仿真结果。从图中可看出,在工作电压为13.5 V时,LED串联电流达到1 000 mA,且在工作电压范围内,电流变化比较平稳。
图11为反馈电路模块仿真结果,线条1为转向灯电源电压信号,线条2为诊断电路反馈信号。图11(a)中,当LED正常工作时,反馈信号跟随转向灯供电电压是一个方波信号;图11(b)中,当LED短路时,反馈信号保持低电平状态。9 V供电情况下状态与该结果类似。通过仿真验证了该反馈方案是可行的。

3 结论
结合某汽车厂实际的车灯设计要求,分析比较了不同车灯LED驱动方案的特点,按功能需求的步骤给出了一种低成本的带故障反馈的车灯LED驱动设计方案,并通过仿真验证了电路设计方案的可行性,给其他类似功能要求的设计提供了参考。
猜你喜欢
汽车维修与保养(2020年1期)2020-04-19
汽车电器(2020年2期)2020-03-13
汽车维护与修理(2020年17期)2020-03-10
科学与财富(2019年7期)2019-10-21
电子技术与软件工程(2017年10期)2017-06-02
电子技术与软件工程(2017年2期)2017-03-15
卷宗(2016年10期)2017-01-21
中老年健康(2016年10期)2016-11-19
电脑知识与技术(2016年11期)2016-06-17
中国科技纵横(2016年6期)2016-05-14
