
工业机器人电磁抗扰度测试监控方法
2019-03-10 08:33黄武凯孙添飞窦满义
丝路视野 2019年5期
关键词:工业机器人
黄武凯 孙添飞 窦满义
摘 要:本文为工业机器人电磁场辐射抗扰度测试过程中的一种性能评定方法,属于机器人及智能制造高新技术装备的创新测试方法。在电磁兼容(EMC)电磁辐射抗扰度测试过程中通过图像比对,监控工业机器人在电磁辐射抗扰度测试过程中的性能降低情况。通过搭建所需硬件架构,包括电波暗室、图像采集仪等对机器人进行实时监控。
关键词:工业机器人 辐射抗扰度 监控方法
现有检测工业机器人性能的仪器分为接触式和非接触式两类。例如采用接触式测量方法的拉线式测量仪,利用三边测量法原理将测量线与机器人测量点连接,光学编码器将连接线的拉伸长度实时传输到系统软件,软件分析得到机器人测量点动态性能指标;采用非接触式测量方法的激光跟踪仪,通过比较发射和接收到的激光光束对目标位姿信息实时跟踪来测算目标的位置,通过软件分析得到机器人的动态
性能。
在进行电磁场辐射抗扰度试验时,为了确保在规定的频率范围内受试设备周围的磁场均匀性,国家标准要求优先采用的实验设施为安装有吸波材料的屏蔽室即电波暗室或可调式半电波暗室。
检测机器人运动状态的测量仪器对电磁场辐射抗扰度试验所需的强磁场很敏感,如果将测量仪器暴露在强磁场中,自身很容易受到干扰甚至损坏无法正常工作,难以得到准确的测量结果。采用非接触式测量仪器在测量时必须放置在暗室中,因此在强磁场下进行测量时測量结果不确定度大且仪器损坏风险较高;若采用接触式测量仪器,为避免测量仪器在强磁场下受到干扰,可考虑将测量仪器放置在暗室外部,然而暗室的结构性能决定了测量仪器的结构部件无法自由穿过墙壁,从而限制了接触式测量仪器在工业机器人电磁抗扰度测试中的应用。所以,现有的主流测试仪器不适用于在电磁场辐射抗扰度试验时检测工业机器人的运动状态。
本监控方法工作原理如下:
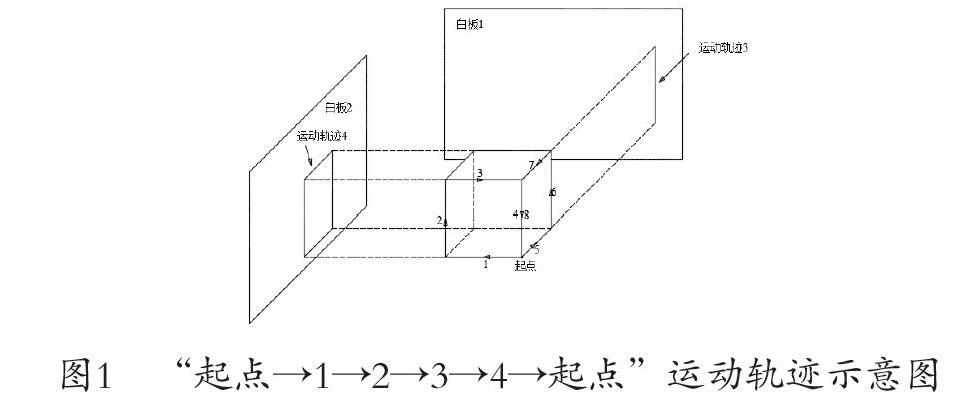
对工业机器人进行编程,使工业机器人的末端沿立方体两个侧面循环运动,运动轨迹为“起点→1→2→3→4→起点→5→6→7→8→起点”。 图像采集仪采集在白板1和白板2上形成的图像信息,并传给电脑处理同时将其图像显示在监视器上。
当工业机器人运行程序“起点→1→2→3→4→起点”时,激光探头发出的激光束在白板1上形成一个正方形迹线(运动轨迹1),另一个激光探头则在白板2上形成一条竖线(运动轨迹2),如图1所示。
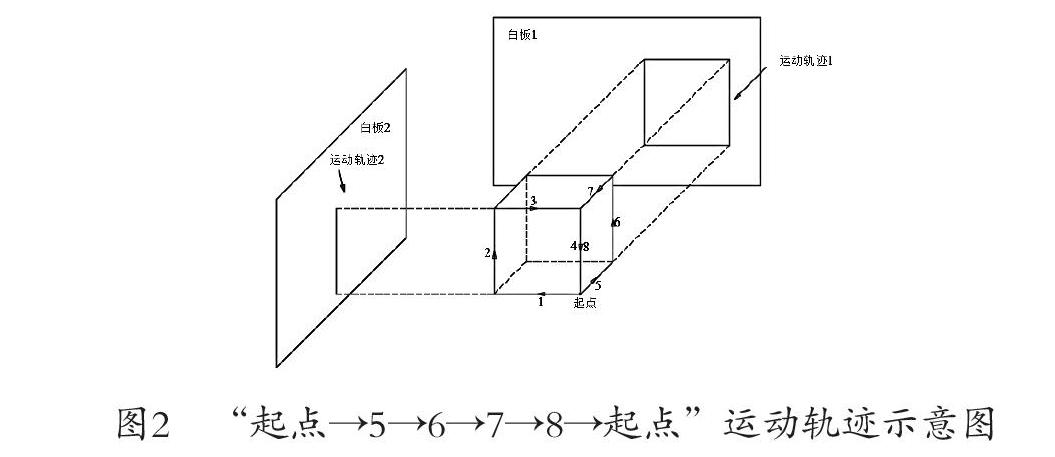
当工业机器人运行程序“起点→5→6→7→8→起点”时,激光探头发出的激光束则在白板1上形成一条竖线(运动轨迹3),另外一个激光探头在白板2上形成一个正方形迹线(运动轨迹4),如图2所示。
测试时,在未施加电磁干扰的情况下让工业机器人按照所编程序自动运行,图像采集仪记录下白板1、2上各自形成的迹线图像信息并传给电脑。然后,对工业机器人施加电磁抗扰度测试所需电磁场,工业机器人继续自动运行,图像采集仪将实时采集图像信息并传给电脑。
通过软件实现对前后图像信息进行比较,并将结果显示在监视器上。根据显示结果来判定其轨迹偏离程度,从而确定电磁辐射抗扰度试验过程中工业机器人受干扰程度。
本方法通过搭建所需硬件架构,包括电波暗室、图像采集仪等对机器人进行实时监控。利用图像采集仪采集工业机器人电磁抗扰度测试过程中的图像信息,通过软件分析和比对差异,实时监控工业机器人在电磁抗扰度测试过程中性能的变化情况。
参考文献
[1]杨显清,杨德强,潘锦.电磁兼容原理与技术[M].北京:电子工业出版社,2016.
[2]邹澎,周晓萍.电磁兼容原理、技术和应用[M].北京:清华大学出版社,2007.
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
科技视界(2016年15期)2016-06-30
成才之路(2016年4期)2016-03-23
