
后抛式免耕播种机碎秸装置离地高度自动控制系统研制
2019-03-05 01:13吴惠昌胡志超顾峰玮张延化陈有庆
农业工程学报 2019年24期
吴惠昌,胡志超,吴 峰,顾峰玮,邱 添,张延化,陈有庆
·农业装备工程与机械化·
后抛式免耕播种机碎秸装置离地高度自动控制系统研制
吴惠昌,胡志超※,吴 峰,顾峰玮,邱 添,张延化,陈有庆
(农业农村部南京农业机械化研究所,南京 210014)
为了解决秸秆粉碎后抛式免耕播种机田间作业时,碎秸装置入土灭茬造成作业负载大、秸秆输送装置拥堵和卡滞的问题,该文研制了基于双扇形孔金属检测圆盘和接近开关的扭转变形采集装置,以有效监测驱动轴的转速和因扭矩负载变化引起的驱动轴错位角。设计了基于32位ARM CortexTM-M3核微处理器的碎秸装置离地高度自动控制系统,实时采集驱动轴转速和错位角,分析其变化趋势,辨别作业工况,输出相应电磁阀控制信号,驱动液压缸适时调整碎秸装置的离地高度,稳定作业负载。试验结果表明,在2 500 r/min的驱动轴额定转速下,碎秸装置离地高度的改变使作业负载变化时,自动控制系统使驱动轴的转速控制在2 448~2 632 r/min之间,驱动轴错位角的变化量为±0.002 4 rad,控制信号对错位角变化的响应延时为0.24 s。田间试验结果表明,利用碎秸装置离地高度自动控制系统后机具的通过性极大改善,堵塞现象消失,作业效率提高52.9%,碎秸作业后地表残茬高度降低43.4%。该设计利用驱动轴转速和错位角的变化趋势辨别作业工况,消除了机械结构参数和材质差异等因素对驱动轴错位角的影响,可为相关农机具扭矩负载定性监测提供借鉴。
农业机械;秸秆;离地高度;错位角;自动控制
0 引 言
免耕播种作为机械化保护性耕作的核心技术[1],是在留有前茬作物秸秆与根茬的田块直接进行播种[2-5]。国内外大量实践证明,实施免耕播种的保护性耕作,不仅减少水分蒸发和水土流失,还能提升种子发芽率,有利于蓄水保墒和增产增收,同时在一定程度上提高土壤肥力[6-8]。但是对于前茬作物收获后秸秆不做任何处理的“全量秸秆地”,传统免耕播种设备极易出现架种、晾种、机具入土部件挂草壅堵等问题,严重影响播种作业质量[9]。而秸秆粉碎后抛式免耕播种机在全量秸秆地能够一次性完成秸秆粉碎、清理输送、播种施肥、秸秆覆盖作业,可有效解决入土部件挂草、架种、晾种的问题[10]。
但在实际生产作业中,秸秆粉碎后抛式免耕播种机经常发生秸秆输送装置的抛送管道拥堵或损坏,极大影响作业效率。分析其原因,主要是碎秸装置离地高度过低入导致灭茬过程产生的大量泥土进入秸秆输送装置,使秸秆抛送机构转动受阻,秸秆输抛不彻底,造成拥堵和卡滞[11-12]。目前许多学者通过对秸秆抛送机构的抛送机理、内部物料流场和结构参数优化等方面开展被动防堵研究[13-15],如严伟等[16]通过响应面试验获得秸秆抛送装置叶轮转速和叶片倾角等参数最优值,提升抛送顺畅性;翟之平等[17]通过分析功耗及抛送效率与物料运动规律之间的关系,获取最佳抛送角的范围;吴峰等[18]运用三因素三水平二次回归正交试验确定秸秆输送装置最优喂入量和管道界面参数,降低拥堵发生。被动措施在田块有沟坎或集堆不平时,还是易出现秸秆清输过程中夹带过量泥土,导致秸秆输送装置壅堵、卡滞。因此应从问题根源入手,研制碎秸装置离地高度自适应控制系统进行主动防堵,但相关研究鲜有报道,免耕播种自动控制系统研究主要集中在埋茬和播种深度的控制方面[19-21]。
本文以秸秆粉碎后抛式免耕播种机秸秆收集输送装置为研究对象,根据驱动轴扭转变形实时监测集秸输送装置负载变化,通过限深地轮自动调整免耕播种机的碎秸装置离地高度,主动避免入土灭茬造成秸秆输送装置的拥堵,以期为秸秆粉碎后抛式免耕播种机稳定、高效、顺畅作业提供自适应控制技术支撑。
1 整机结构与控制原理
1.1 整机结构
如图1所示,秸秆粉碎后抛式免耕播种机由秸秆粉碎清理部件和播种部件组成,其中秸秆粉碎清理部件主要由离地高度调整装置1、秸秆粉碎装置3、秸秆抛送装置4、集秸输送装置5、扭转变形采集装置6和碎茬破土装置7组成。肥料箱9和种箱10构成播种部件,并通过后悬挂8挂接于秸秆粉碎清理部件的后部。田间作业时,秸秆粉碎后抛式免耕播种机通过前悬挂2挂接于拖拉机三点悬挂,并由拖拉机提供动力,带动秸秆粉碎装置3、集秸输送装置5和秸秆抛送装置4运转,田间秸秆经过粉碎、收集和提升后,向设备后方均匀抛洒。播种部件在秸秆粉碎清理部件后方无秸秆区域内进行播种作业,抛洒的秸秆均匀覆盖在播后地表[22]。

1.离地高度调整装置 2.前悬挂 3.秸秆粉碎装置 4.秸秆抛送装置 5.集秸输送装置 6.扭转变形采集装置 7.碎茬破土装置 8.后悬挂 9.肥料箱 10.种箱1.Off-ground height adjustment device 2.Front suspension 3.Straw smashing device 4.Straw throwing device 5.Straw collecting and conveying device 6.Torsional deformation acquisition device 7.Stubble cutting and soil breaking device 8.Rear suspension 9.Fertilizer box 10.Seed box
1.2 碎秸装置离地高度控制原理
秸秆粉碎后抛式免耕播种机可在多种前茬作物全量秸秆地进行免耕播种作业。当田块有沟坎或集堆不平时,秸秆粉碎装置会接触地表,夹带过量泥土进入秸秆输送装置,此时集秸输送装置驱动轴的扭矩负载增大,安装于驱动轴两端的扭转变形采集装置实时采集因扭矩负载改变引起的驱动轴错位角度,并输送至微处理器控制模块,微处理器控制模块根据驱动轴错位角和转速等数据,进行分析计算,输出液压电磁阀控制信号,驱动碎秸高度调整装置动作,以碎茬破土装置为支点,实现秸秆粉碎装置离地高度的自动调整,使之与地面保持最优作业距离。
2 碎秸装置离地高度调整机构设计
2.1 驱动轴扭转变形采集装置
驱动轴扭转变形采集装置主要由一对电感式接近传感器和金属检测圆盘组成,分别位于驱动轴的两端,即皮带轮端和风机端,如图2a所示。皮带轮端金属检测圆盘1由限位轴套1固定于皮带轮内侧,并随皮带轮一起转动,对应的接近传感器1由传感器支架1固定于机架上,如图2b所示。风机端金属检测圆盘2由螺栓固定于驱动轴风机叶片端,对应的接近传感器2由传感器支架2固定于机架上,如图2c所示。

1.皮带轮 2.驱动轴 3.输送螺杆 4.风机叶片 5.金属检测圆盘1 6.接近传感器1 7.传感器支架1 8.限位轴套1 9.螺栓 10.金属检测圆盘2 11.限位轴套2 12.接近传感器2 13.传感器支架2
1.Pulley 2.Driving shaft 3.Conveying screw 4.Fan blade 5.Metal detection disc 1 6.Proximity sensor 1 7.Sensor bracket 1 8.Limit shaft sleeve 1 9.Bolt 10.Metal detection disc 2 11.Limit shaft sleeve 2 12.Proximity sensor 2 13.Sensor bracket 2
图2 驱动轴扭转变形采集装置安装示意图
Fig.2 Installation schematic diagram of torsional deformation acquisition device of driving shaft
为保证接近传感器检测信号可靠感应和信号输出稳定,金属检测圆盘扇形通孔的宽度必须大于接近传感器直径,且装配时应将接近传感器端面对正扇形通孔宽度中心,并保证接近传感器端面与金属检测圆盘之间的距离小于接近传感器的检测距离,如图3所示。本设计接近传感器选用Macher公司FAM-12D06N1-DS12型全金属封装电感式接近开关,其外形直径为12 mm,感测距离4 mm,开关频率可达400 Hz。因此,确定金属检测圆盘的圆心角为90°,通孔宽度为30 mm,安装后检测距离为3 mm。

a. 右视图b. 主视图 a. Right viewb. Main view
1.扇形通孔 2.接近传感器 3.金属检测圆盘
1.Fan-shaped through hole 2.Proximity sensor 3.Metal detection disc
注:为接近传感器感应部与金属检测圆盘的距离,mm;为扇形通孔的宽度,mm;为接近传感器感应部的直径,mm;为金属检测圆盘上扇形通孔的圆心角,rad。
Note:is the distance between the sensing part of the proximity sensor and the metal detection disc, mm;is the width of the fan-shaped through hole, mm;is the diameter of the sensing part of the proximity sensor, mm;is the central angle of the fan-shaped through hole on the metal detection disc, rad.
图3 金属检测圆盘与接近传感器相对位置示意图
Fig.3 Diagram of relative position between metal detection disc and proximity sensor
安装于驱动轴皮带轮端和风机端的2个金属检测圆盘的结构参数完全一致。为便于驱动轴扭转变形的采样,其装配相对位置要求金属检测圆盘1的扇形通孔对正接近传感器1期间,金属检测圆盘2的金属部分对正接近传感器2;反之金属检测圆盘2的扇形通孔对正接近传感器2期间,金属检测圆盘1的金属部分对正接近传感器1。接近传感器作为电感式检测元件,通过内部振荡电路感知正前方金属物体的靠近,并输出二进制信号。金属检测圆盘跟随驱动轴高速旋转,扇形通孔正对接近传感器时,接近传感器输出高电平信号“1”;扇形通孔旋转离开后,金属检测圆盘正对接近传感器,则输出低电平信号“0”。接近传感器1和接近传感器2的信号输出波形如图4所示。
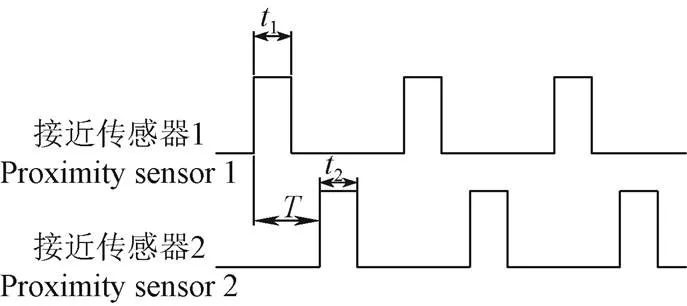
注:t1为金属检测圆盘1的扇形通孔经过接近传感器1的时间,s;t2为金属检测圆盘2的扇形通孔经过接近传感器2的时间,s;T为接近传感器1和接近传感器2检测到扇形通孔的间隔时间,s。
驱动轴转速和2个金属检测圆盘间的错位角根据式 (1)计算。

式中为驱动轴的转速,r/min;为金属检测圆盘旋转1周时扇形通孔经过接近传感器的时间,s;为金属检测圆盘1和金属检测圆盘2的错位角,rad;由于金属检测圆盘扇形通孔的圆心角为常数,因此驱动轴转速和2个金属圆盘错位角的采样实际就是对接近传感器1和接近传感器2输出脉冲宽度和间隔的采样。
根据胡克定律可知,集秸输送装置的驱动轴在输送阻力作用下会产生扭转变形[23],驱动轴两端截面之间产生的扭转角为

式中为扭转角,rad;T为驱动轴两端面之间的扭矩,N·m;为驱动轴两端面之间距离,m;为材料切变模量,Pa;I为极惯性矩,m4;为截面上任意一点到圆心的距离,m;为截面面积,m2。驱动轴为实心圆轴,可在圆轴截面上距离圆心处取长度为d的环形面积作为微面积d,驱动轴的极惯性矩I为

式中为驱动轴的直径,m。将式(3)代入式(2)可得驱动轴两截面间的扭转角为

在驱动轴材料、截面形状以及轴向长度确定的情况下,驱动轴长度、驱动轴直径和切变模量均为常数,同时驱动轴产生的扭转角等于金属检测圆盘1和金属检测圆盘2的错位角变化量D,因此根据式(1)和式(4)可得:

式中和均为比例常数;D为接近传感器1和2检测到扇形通孔的间隔时间变化量,s.
因此,通过监测接近传感器1和接近传感器2的输出脉冲间隔变化量D,计算出D,即可监测秸秆粉碎后抛式免耕播种机作业时的集秸输送负载T的变化,为碎秸装置离地高度调整提供依据。
2.2 离地高度调整装置
秸秆粉碎后抛式免耕播种机秸秆粉碎清理部件的左右两侧各有一套碎秸装置离地高度调整装置。如图5所示,碎秸高度调整机构主要由液压缸1、固定支架2、地轮支架7和地轮8组成。液压缸1的缸体通过螺栓固定于固定支架2的顶部,液压缸活塞杆通过活塞杆套3和销轴5连接地轮支架7,地轮支架7由销轴5引导可在固定支架2的腰型导向通孔内限位上下移动,地轮8固定于地轮支架7的下方。作业时,地轮8紧贴地表行走并支撑主机架10,当高压油注入液压缸1无杆腔时,液压缸活塞杆向下作用于地轮支架7和地轮8,反作用力使主机架10上升,碎秸装置离地高度增加;反之高压油注入液压缸1有杆腔时,主机架10下降,碎秸装置离地高度减小。

1.液压缸 2.固定支架 3.活塞杆套 4.垫圈 5.销轴 6.开口销 7.地轮支架 8.地轮 9.加强箍 10.主机架 11.加强筋 1.Hydraulic cylinder 2.Fixed bracket 3.Piston rod sleeve 4.Washer 5.Pin shaft 6.Cotter pin 7.Ground wheel bracket 8.Ground wheel 9.Reinforced hoop 10.Main frame 11.Stiffener
碎秸装置离地高度调整机构中液压缸克服秸秆粉碎清理部件的自重所需推力由式(6)计算。

式中为秸秆粉碎清理部件质量,kg;为秸秆粉碎清理部件重心至碎茬破土装置距离,mm;为碎秸高度调整装置至碎茬破土装置距离,mm;为重力加速度,m/s2。秸秆粉碎后抛式免耕播种机的秸秆粉碎清理部件的设计质量为850 kg,相应自重力臂即为部件重心至碎茬破土装置距离,实测约为430 mm;支撑力臂为碎秸高度调整装置与碎茬破土装置的距离,设计为1 400 mm。由此可计算出调整推力至少2.56 kN,分配到每个调整装置上的推力至少为1.28 kN,由液压缸产生。
2.3 液压驱动系统
碎秸装置离地高度调整机构由液压系统驱动,液压系统原理如图6所示,主要由2部分组成:一是拖拉机内部液压驱动系统高压油供给部分,包括油箱1、过滤器2和单向定量液压泵;二是免耕播种机机载部分,包括溢流阀4、三位四通电磁阀5和液压缸6。2部分通过液压快速接头进行连接。三位四通电磁阀5接收控制系统的指令,切换供油路线,改变液压缸运动方向,进行碎秸装置离地高度的调整。溢流阀4主要适应不同拖拉机的供油系统,为机载液压部分提供固定工作油压,保证液压缸推力稳定[24-25]。单个液压缸的推力由式(7)计算。


1.油箱 2.过滤器 3.单向定量液压泵 4.溢流阀 5.三位四通电磁阀 6.液压缸
1.Oil tank 2.Filter 3.Unidirectional quantitative hydraulic pump 4.Overflow valve 5.Three-position four-way solenoid valve 6.Hydraulic cylinder
图6 液压系统原理图
Fig.6 Schematic diagram of hydraulic system

表1 液压缸设计参数
3 控制系统设计
微处理器系统通过传感器接口电路分别采集位于驱动轴两端的接近传感器1和接近传感器2输出的脉冲信号,经过波形时域数据分析处理,判断集秸输送装置驱动轴实时工作负载变化情况,以此输出碎秸装置离地高度调节信号,经电磁阀驱动电路放大,驱动电磁阀动作改变液压系统供油方向,使液压缸产生碎秸高度调整动作[26-28]。
3.1 电路硬件设计
3.1.1 电源
为适应不同拖拉机的电源系统,碎秸装置离地高度自动控制系统采用DC12~24V供电,电源分别采用隔离稳压DC-DC模块和宽压差线性稳压管输出微处理器系统供电VCC和电磁阀驱动电路供电VSS。两路供电相互隔离,可有效抵抗快速脉冲群等传导性干扰[29]。
3.1.2 微处理器系统
选择ST公司32位基于ARM CortexTM-M3核的STM32F101R6微处理器构成数据处理硬件平台,具有丰富功能配置和36 MHz的CPU处理速度,满足错位角信号采集和分析判断的要求。
3.1.3 电磁阀驱动电路
电磁阀线圈驱动电路由N通道硅MOS管2SK2931和高效二极管堆10GL2CZ47A组成[30],如图7所示。光耦TLP817是物理隔离微处理器电路和电磁阀线圈驱动电路,二极管堆D1是为了消除线圈反向续流,抑制浪涌,防止MOS管被反向击穿。

图7 电磁阀驱动电路原理图
3.1.4 传感器接口电路
传感器接口电路由钳位二极管1N4148、RC滤波和整形电路组成,消除干扰毛刺,并通过光耦与微处理器连接,提高接口电路抗干扰能力。为确保接近传感器输出脉冲采样准确不丢失,接近传感器脉冲经光耦隔离后接至微处理器的外部输入捕获端口,由微处理器硬件完成脉冲宽度和时序的捕获保存,捕获精度达微秒级[31]。
3.2 软件设计
碎秸装置离地高度自动控制流程如图8所示,软件采用STM32固件库函数编程,在RVMDK5.12编程编译环境下,采用前后台程序架构。

注:n(i)~n(i+2)表示驱动轴连续3个旋转周期内的转速,r·min-1;f (i)~f (i+2)表示驱动轴连续3个旋转周期内的错位角,rad。
硬件系统中,2个接近传感器输出信号经光耦隔离后分别接入微处理器外部输入捕获端口,程序设置并开启微处理器的捕获中断,且触发方式设置为边沿触。在中断程序中连续采样脉冲时间1、2和,以此计算驱动轴实时转速()和错位角(),并以先进先出方式记录驱动轴旋转每周的()和()值。
田间播种作业时,在集秸输送装置驱动轴转速达到2 500 r/min前,通过控制系统手动调整碎秸装置离地高度调整机构的地轮支架位置,使销轴位于固定支架腰型导向通孔中部,并调整拖拉机三点悬挂使碎秸装置离地高度处于合适位置。当转速大于2 500 r/min后,程序进入碎秸装置离地高度自动调整模式。控制程序实时监控驱动轴转速()和错位角(),并进行数字滤波降噪,分析比较驱动轴连续3个旋转周期的()和()变化,根据变化趋势判断作业负载状况,输出相应碎秸装置离地高度调整措施,使碎秸装置作业负载稳定,避免秸秆输送装置壅堵、卡滞。在自动调整碎秸高度的同时,进行控制饱和判断,分析调整过程中()和()是否产生闭环控制负反馈变化,即对驱动轴负载变化产生反向稳定作用,若产生负反馈变化,则继续调整碎秸装置离地高度稳定负载,否则控制系统输出信号,驱动声光报警,提示操作人员采取必要的手动调整措施。
4 性能试验
4.1 信号采集与控制输出验证
4.1.1 试验条件
2018年9月在南京市溧水区白马试验基地利用约翰迪尔6B-1404拖拉机挂接秸秆粉碎后抛式免耕播种机进行信号采集与控制输出验证试验,验证信号采集方法和控制信号输出的正确性。为了便于数据监测,微处理器通过USART1口每0.1 s输出1次当前驱动轴转速()和错位角()的值,同时连接笔记本电脑进行数据外部监测。电磁阀驱动信号采用FLUKE190-120双通道便携式示波器进行采集,监测控制输出逻辑和时序。试验场地选择全量秸秆稻茬覆盖的田块,水稻秸秆覆盖量为1.14 kg/m2,秸秆平均含水率为41.7%,平均土壤硬度为20.5 kg/cm2,土壤湿度为47.2%.
4.1.2 试验方法
证试验分2步进行:一是不使用液压系统,即免耕播种机的液压系统不连接拖拉机液压输出,由拖拉机驾驶员手动改变拖拉机输出转速和碎秸装置离地高度,模拟不同作业工况,验证控制输出逻辑的正确性,示波器记录接近传感器输出和控制输出脉冲波形,分析控制输出响应速度;二是连接拖拉机的液压输出和免耕播种的液压系统,保持油门,使驱动轴转速维持在2 500 r/min,调整拖拉机三点悬挂改变碎秸装置离地高度,改变碎秸装置负载,验证碎秸高度自动控制系统实时输出控制指令稳定驱动轴转速和负载的效果。
4.1.3 试验结果与分析
实测试验过程驱动轴转速和错位角的变化曲线如图9所示,相应碎秸装置离地高度调控方式如表2所示。

表2 碎秸装置离地高度调控方式(未使用液压系统)
图9a中,Ⅰ表示拖拉机提速阶段,驱动轴转速从1 220 r/min提高至2 532 r/min,使碎秸装置离地高度自动控制系统进入自动调整模式,过程中手动调整碎秸装置离地高度;Ⅱ表示驱动轴负载增大使转速下降,驱动轴错位角从1.477 rad增加至1.515 rad,转速从2 528 r/min下降至1 963 r/min,自动控制系统输出增加碎秸装置离地高度控制信号,降低驱动轴负载;Ⅲ表示驱动轴负载增大时手动提高拖拉机转速,驱动轴错位角从1.503 rad增加至1.53 rad,转速从1 966 r/min提高至2 530 r/min,自动控制系统不输出控制信号,保持碎秸装置离地高度不变;Ⅳ表示驱动轴负载减小时手动降低拖拉机转速,驱动轴错位角从1.529 rad减小至1.493 rad,转速从2 485 r/min-1下降至2 009 r/min,自动控制系统输出降低碎秸装置离地高度信号,增加驱动轴负载;Ⅴ表示驱动轴负载减小使拖拉机转速增加,驱动轴错位角从1.495 rad减小至1.477 rad,转速从2 016 r/min提高至2 2497 r/min,自动控制系统输出降低碎秸装置离地高度信号,增加驱动轴负载;Ⅵ表示作业结束,驱动轴转速手动降至2 000 r/min以下,自动控制程序进入手动调整模式,手动调整碎秸装置离地高度,使作业部件离开地面。

注:Ⅰ~Ⅵ表示人为模拟不同作业工况:Ⅰ是加大拖拉机油门,使驱动轴转速从1 220 r·min-1升至2 532 r·min-1;Ⅱ是保持拖拉机油门不变,增加驱动轴负载使转速下降至1 963 r·min-1;Ⅲ是加大拖拉机油门使驱动轴转速从1 966 r·min-1升至2 530 r·min-1的同时增加驱动轴负载;Ⅳ是减小拖拉机油门使驱动轴转速从2 485 r·min-1降至2 009 r·min-1的同时减小驱动轴负载;Ⅴ是加大拖拉机油门使驱动轴转速从2 016 r·min-1升至2 497 r·min-1的同时减小驱动轴负载;Ⅵ是减小拖拉机油门使驱动轴转速从2 495 r·min-1降至1 214 r·min-1。下同。
未使用液压系统的模拟控制试验显示,碎秸装置离地高度自动控制系统对不同模拟作业工况的判断和控制输出正确,与实际作业碎秸负载变化时手动调整碎秸装置离地高度的动作一致。由示波器记录波形分析,实测控制信号对错位角变化的响应延时为0.24 s。接入液压系统后,由于碎秸控制系统的介入,实时修正碎秸高度,稳定集秸输送装置驱动轴负载。试验测量显示(如图9b),驱动轴额定转速为2 500 r/min时,可使驱动轴的转速控制在2 448~2 632 r/min之间(即Ⅱ~Ⅴ工况),对应错位角的变化量为±0.002 4 rad。
4.2 田间作业性能试验
4.2.1 考核指标
碎秸高度自动控制系统在秸秆粉碎后抛式免耕播种机作业时起到的作用是自适应调整碎秸高度,稳定碎秸负载,避免秸秆输送装置进入过量泥土而产生壅堵和卡滞,实现免耕播种机高质、高效、顺畅作业。因此,作业性能考核指标主要为残茬高度、机具作业效率和通过性。
4.2.2 试验方法
2018年10月在江苏省农业科学院六合基地进行田间小麦播种作业,试验对比手动调整和自动调整碎秸装置离地高度时的设备作业性能。试验地块为机收后全量秸秆覆盖稻茬地,平均土壤硬度为23.7 kg/cm2,土壤湿度为34.1%,水稻秸秆覆盖量为0.9 kg/m2,秸秆平均含水率为33.2%,水稻机收留茬高度为28 cm,动力拖拉机选用东汽英福莱DQ1204,试验用免耕播种机作业幅宽2 000 mm.
1)残茬高度
按照《秸秆还田机作业质量》(NY/T 500-2015)[32]测量碎秸作业后残留在地表的根茬平均高度。连续作业100m后随机选择5个测量点,每个测量点在设备幅宽范围内左、中、右处各取3株根茬测量高度,取平均值。为了便于测定,采用侧向后抛,使碎秸不覆盖作业后地表,且播种部件不工作,对比使用和不使用碎秸高度自动控制系统作业后平均残茬高度。
2)机具通过性
机具通过性按照《免耕播种机质量评价技术规范》(NY/T 1768—2009)[33]进行测定。试验地块长150 m,使用和不使用碎秸高度自动控制系统各作业3个往返行程,对比观察作业过程中发生轻度堵塞和重度堵塞的次数。
3)作业效率
测量使用和不使用碎秸高度自动控制系统完成相同面积田块播种作业的用时,计算相应的作业效率。
试验机具如图10所示。

1.液压供油管 2.碎秸高度调整机构 3.控制器 4.错位角检测机构
4.2.3 试验结果与分析
试验结果如表3所示。由表3可知,使用碎秸高度自动控制系统后,免耕播种机作业后地表的残茬高度下降了43.4%,残茬高度降低至人工调控无法达到的水平;免耕播种机的通过性极大改善,试验过程未发生堵塞现象,证明碎秸高度自动控制系统能有效避免秸秆输送装置壅堵、卡滞,作业顺畅性明显提升,作业效率提高了52.9%.

表3 田间试验结果
注:“轻度堵塞”和“重度堵塞”的判定方法参照标准NY/T1768-2009。
Note: The judgment methods of “mild blockages” and “severe blockages” refer to the standard NY/T1768-2009.
5 结 论
1)通过分析秸秆粉碎后抛式免耕播种机秸秆粉碎输送装置产生壅堵卡滞的成因,研制了基于双扇形孔金属检测圆盘和接近开关的扭转变形采集装置,有效监测驱动轴的转速和因扭矩负载改变引起的错位角。
2)基于32位ARM微处理器硬件平台的控制器采集驱动轴转速和错位角,分析其变化趋势,辨别作业工况,输出相应电磁阀控制信号,驱动碎秸高度调整机构实时修正秸秆粉碎输送装置离地高度,稳定作业负载。试验显示,在2 500 r/min驱动轴额定作业转速下,可使驱动轴的转速控制在2 448~2 632 r/min之间,对应错位角的变化量为±0.002 4 rad,实测控制响应时间为0.24 s.
3)碎秸高度自动控制系统可以使秸秆粉碎后抛式免耕播种机的通过性极大改善,作业效率提高52.9%,碎秸作业后地表残茬高度降低43.4%.
[1]李安宁,范学民,吴传云,等. 保护性耕作现状及发展趋势[J]. 农业机械学报,2006,37(10):177-180,111. Li Anning, Fan Xuemin, Wu Chuanyun, et al. Situation and development trends of conservation tillage in the world[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(10): 177-180, 111. (in Chinese with English abstract)
[2]何进,李洪文,陈海涛,等. 保护性耕作技术与机具研究进展[J]. 农业机械学报,2018,49(4):1-19. He Jin, Li Hongwen, Chen Haitao, et al. Research progress of conservation tillage technology and machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(4): 1-19. (in Chinese with English abstract)
[3]杨丽,张瑞,刘全威,等. 防堵和播深控制机构提高玉米免耕精量播种性能[J]. 农业工程学报,2016,32(17):18-23. Yang Li, Zhang Rui, Liu Quanwei, et al. Row cleaner and depth control unit improving sowing performance of maize no-till precision planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 18-23. (in Chinese with English abstract)
[4]刘艳芬,林静,郝宝玉,等. 免耕播种机土壤工作部件测试装置设计与试验[J]. 农业工程学报,2016,32(17):24-31. Liu Yanfen, Lin Jing, Hao Baoyu, et al. Design and experiment of testing device for soil working tool in no-tillage planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 24-31. (in Chinese with English abstract)
[5]陈有庆,吴峰,顾峰玮,等. 麦茬全秸秆覆盖地花生免耕播种机试验研究[J]. 中国农机化学报,2014,35(2):133-135. Chen Youqing, Wu Feng, Gu Fengwei, et al. Test on peanut no-till planter under the coverage of the wheat straw[J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 132-135. (in Chinese with English abstract)
[6]农业部农业机械化管理司. 中国保护性耕作[M]. 北京:中国农业出版社,2008.
[7]林静,宋玉秋,李宝筏. 东北垄作区机械免耕播种工艺[J]. 农业工程学报,2014,30(9):50-57. Lin Jing, Song Yuqiu, Li Baofa. Mechanical no-tillage sowing technology in ridge area of Northeast China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(9): 50-57. (in Chinese with English abstract)
[8]胡红,李洪文,李传友,等. 稻茬田小麦宽幅精量少耕播种机的设计与试验[J]. 农业工程学报,2016,32(4):24-32. Hu Hong, Li Hongwen, Li Chuanyou, et al. Design and experiment of broad width and precision minimal tillage wheat planter in rice stubble field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(4): 24-32. (in Chinese with English abstract)
[9]何萍,张新忠,李晓春. 免耕播种小麦常见问题分析[J]. 现代农机,2016(5):48-49.
[10]顾峰玮,胡志超,陈有庆,等. “洁区播种”思路下麦茬全秸秆覆盖地花生免耕播种机研制[J]. 农业工程学报,2016,32(20):15-23. Gu Fengwei, Hu Zhichao, Chen Youqing, et al. Development and experiment of peanut no-till planter under full wheat straw mulching based on “clean area planting”[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(20): 15-23. (in Chinese with English abstract)
[11]王汉羊,陈海涛,纪文义. 2BMFJ-3型麦茬地免耕精播机防堵装置[J]. 农业机械学报,2013 ,44(4):64-70. Wang Hanyang, Chen Haitao, Ji Wenyi. Anti-blocking mechanism of type 2BMFJ-3 no-till precision planter for wheat stubble fields[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 64-70. (in Chinese with English abstract)
[12]林静,李宝筏,李宏哲. 阿基米德螺线型破茬开沟和切拨防堵装置的设计与试验[J]. 农业工程学报,2015,31(17):10-19. Lin Jing, Li Baofa, Li Hongzhe. Design and experiment of Archimedes spiral type stubble breaking ditching device and stubble breaking anti blocking device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(17): 10-19. (in Chinese with English abstract)
[13]林德志,吴努,陆永光,等. 免耕播种机的抛送装置数值模拟与试验研究[J]. 江苏农业科学,2016,44(8):410-414.
[14]翟之平,张龙,刘长增,等. 秸秆抛送装置外壳振动辐射噪声数值模拟与试验验证[J]. 农业工程学报,2017,33(16):72-79. Zhai Zhiping, Zhang Long, Liu Changzeng, et al. Numerical simulation and experimental validation of radiation noise from vibrating shell of stalk impeller blower[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 72 -79. (in Chinese with English abstract)
[15]林德志,吴努,陆永光,等. 适用于免耕播种的叶片式抛送装置的数值模拟[J]. 农机化研究,2016,38(7):90-94. Lin Dezhi, Wu Nu, Lu Yongguang, et al. Numerical simulation and analysis on impeller blower apply to no-till seeding[J]. Journal of Agricultural Mechanization Research, 2016, 38(7): 90-94. (in Chinese with English abstract)
[16]严伟,吴努,顾峰玮,等. 叶片式抛送装置功耗试验研究与参数优化[J]. 中国农业大学学报,2017,22(7):99-106. Yan Wei, Wu Nu, Gu Fengwei, et al. Parameter optimization and experiment for the power consumption of impeller-blower[J]. Journal of China Agricultural University, 2017, 22(7): 99-106. (in Chinese with English abstract)
[17]翟之平,高搏,杨忠义,等. 叶片式秸秆抛送装置功耗分析与参数优化[J]. 农业工程学报,2013,29(10):26-33. Zhai Zhiping, Gao Bo, Yang Zhongyi, et al. Power consumption and parameter optimization of stalk impeller blowers[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(10): 26-33. (in Chinese with English abstract)
[18]吴峰,徐弘搏,顾峰玮,等. 秸秆粉碎后抛式多功能免耕播种机秸秆输送装置改进[J]. 农业工程学报,2017,33(24):18-26. Wu Feng, Xu Hongbo, Gu Fengwei, et al. Improvement of straw transport device for straw-smashing back-throwing type multi-function no-tillage planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(24): 18-26. (in Chinese with English abstract)
[19]朱毅,罗海峰,毛灿,等. 播种机播种深度控制技术研究进展[J]. 中国农机化学报,2019,40(7):114-118. Zhu Yi, Luo Haifeng, Mao Can, et al. Research progress on sowing depth control technology of planter[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(7): 114-118. (in Chinese with English abstract)
[20]黄东岩,朱龙图,贾洪雷,等. 基于压点薄膜的免耕播种机播种深度控制系统[J]. 农业机械学报,2015,46(4):1-8. Huang Dongyan, Zhu Longtu, Jia Honglei, et al. Automatic control system of seeding depth based on piezoelectric film for no-till planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(4): 1-8. (in Chinese with English abstract).
[21]赵金辉,刘立晶,杨学军,等. 播种机开沟深度控制系统的设计与室内试验[J]. 农业工程学报,2015,31(6):35-41. Zhao Jinhui, Liu Lijing, Yang Xuejun, et al. Design and laboratory test of control system for depth of furrow opening[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 35-41. (in Chinese with English abstract)
[22]刘继龙,李佳文,周延,等. 秸秆覆盖与耕作方式对土壤水分特性的影响[J]. 农业机械学报,2019,50(7):333-339. Liu Jilong, Li Jiawen, Zhou Yan, et al. Effects of straw mulching and tillage on soil water characteristics[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019 50(7): 333-339. (in Chinese with English abstract)
[23]刘鸿文. 材料力学(第5版)[M]. 北京:高等教育出版社,2011.
[24]张利平. 液压控制系统及设计[M]. 北京:化学工业出版社,2004.
[25]陈亚洲,皮钧,郑添义. 基于先导分配的电液比例控制平地机控制系统[J]. 农业工程学报,2012,28(2):7-12. Chen Yazhou, Pi Jun, Zheng Tianyi. Electro-hydraulic proportional manipulation system of land leveler based on pilot oil distribution method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(2): 7-12. (in Chinese with English abstract)
[26]吴惠昌,胡志超,彭宝良,等. 牵引式甜菜联合收获机自动对行系统研制[J]. 农业工程学报,2013,29(12):17-24. Wu Huichang, Hu Zhichao, Peng Baoliang, et al. Development of auto-follow row system employed in pull-type beet combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(12): 17-24. (in Chinese with English abstract)
[27]游兆延,吴惠昌,胡志超,等. 4HLB-2 型花生收获机挖掘深度的模糊控制[J]. 西北农林科技大学学报:自然科学版,2015,43(11):221-227. You Zhaoyan, Wu Huichang, Hu Zhichao, et al. Fuzzy control on digging depth of 4HLB-2 peanut harvester[J]. Journal of Northwest A&F University: Nat. Sci. Ed., 2015, 43(11): 221-227. (in Chinese with English abstract)
[28]陈智锴,吴惠昌,张延化,等. 半喂入四行花生联合收获机自动限深系统研制[J]. 农业工程学报,2018,34(15):10-18. Chen Zhikai, Wu Huichang, Zhang Yanhua, et al. Development of automatic depth control device for semi-feeding four-row peanut combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(15): 10-18. (in Chinese with English abstract)
[29]寇戈,蒋立平. 模拟电路与数字电路[M]. 北京:电子工业出版社,2009.
[30]宋军,李书泽,李孝禄,等. 高速电磁阀驱动电路设计及试验分析[J]. 汽车工程,2005,27(5):546-549. Song Jun, Li Shuze, Li Xiaolu, et al. Design and experimental analysis of drive circuit for high-speed solenoid valve[J]. Automotive Engineering, 2005, 27(5): 546-549. (in Chinese with English Abstract)
[31]黄智伟,王兵,朱卫华. STM32F 32位ARM微控制器应用设计与实践(第2版)[M]. 北京:北京航空航天大学出版社,2014.
[32]NY/T 500-2015,秸秆还田机作业质量[S].
[33]NY/T 1768-2009,免耕播种机质量评价技术规范[S].
Development of automatic control system for straw smashing height adjustment device of back throwing type no-tillage planter
Wu Huichang, Hu Zhichao※, Wu Feng, Gu Fengwei, Qiu Tian, Zhang Yanhua, Chen Youqing
(,,210014,)
As the core technology of mechanized conservation tillage, no-tillage sowing is a new type of agricultural cultivation method popularized in recent years, it directly sows in the field where the straw and roots of the former crops are left, which not only reduces water evaporation and soil erosion, but also can ensure the germination and growth of seeds, which is conducive to water storage and conservation, increasing production and income, and at the same time improving soil fertility to some extent. However, after the harvest of the former crops without any collection and removal treatment, the “full amount of straw field” has become the new normal state of China's cultivation. The traditional no-tillage seeding equipments are prone to easily increase the workload of straw crushing device when it entering the soil and extinguishing stubble, which causes the blockage and jamming of straw conveying device. In order to solve this problem, the back-throwing type no-tillage straw smashing planter was taken as the research object in this paper, and an automatic control system based on off-ground height of the straw smashing device was developed. Torsional deformation acquisition device was created based on a double fan-shaped through hole metal detection disc and proximity switch, which was installed at both ends of the driving shaft to effectively monitor the rotation speed of the driving shaft and the stagger angle caused by the change of torque load. The design was based on the 32-bit ARM CortexTM-M3 core microprocessor hardware platform, which constituted the data acquisition and output drive unit of the automatic control system, the driving shaft rotation speed and stagger angle was collected in real time, the change trend was analysed through the system software, and current working conditions was identified. According to the corresponding output control signal, the straw height adjusting mechanism timely corrects the off-ground height of the straw smashing and conveying device to stabilize the working load. The straw height adjustment mechanism was composed of a solenoid valve, a hydraulic cylinder, a fixed bracket and a supporting ground wheel. The hydraulic cylinder's high pressure driving oil was taken directly from the working tractor to improve the applicability of the device. The performance verification test showed that under the driving shaft’s rated rotation speed of 2 500 r/min, when the height of the straw crusher off the ground changed the working load, the automatic control system controled the rotation speed of the driving shaft between 2448 and 2632 r/min, the change of the stagger angle of the driving shaft was ± 0.002 4 rad, and the response delay time of the control signal to the change of the stagger angle was 0.24 s. The field operation comparison test showed that when the back-throwing type no-tillage straw smashing planter was equipped with automatic control system based on off-ground height of the straw smashing device, the passability of the machine was greatly improved, the occurrence of blockage was eliminated, the operation efficiency was increased by 52.9%, and the height of surface stubble was reduced by 43.4% after straw smashing operation. In conclusion, The design of this paper uses the change trend of the driving shaft rotation speed and stagger angle to identify the working condition, effectively eliminating the influence of mechanical structure parameters and material differences, and the mechanical structure is light and easy to install, which can provide reference for qualitative monitoring of torque load of agricultural machinery.
agricultural machinery; straw; off-ground height; stagger angle; automatic control
吴惠昌,胡志超,吴 峰,顾峰玮,邱 添,张延化,陈有庆. 后抛式免耕播种机碎秸装置离地高度自动控制系统研制[J]. 农业工程学报,2019,35(24):1-9. doi:10.11975/j.issn.1002-6819.2019.24.001 http://www.tcsae.org
Wu Huichang, Hu Zhichao, Wu Feng, Gu Fengwei, Qiu Tian, Zhang Yanhua, Chen Youqing. Development of automatic control system for straw smashing height adjustment device of back throwing type no-tillage planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(24): 1-9. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.24.001 http://www.tcsae.org
10.11975/j.issn.1002-6819.2019.24.001
S223.2
A
1002-6819(2019)-24-0001-09
2019-09-05
2019-11-30
中国农业科学院创新工程(绿色耕作与土下果实收获机械化);国家绿肥产业技术体系(CARS-22)
吴惠昌,研究员,主要从事农产品加工与农机装备智能化的研究。Email:huichangwu@126.com
胡志超,研究员,主要从事农作物收获及产后加工技术装备的研究。Email:nfzhongzi@163.com
中国农业工程学会高级会员:胡志超(E041200498S)
猜你喜欢
农业技术与装备(2021年3期)2021-12-01
今日农业(2020年22期)2020-12-14
奥秘(创新大赛)(2020年10期)2020-10-28
石材(2020年7期)2020-08-24
石材(2020年6期)2020-08-24
农民致富之友(2019年22期)2019-08-16
农民致富之友(2019年16期)2019-07-01
红蜻蜓·低年级(2017年3期)2017-03-30
新高考·高一数学(2016年3期)2016-05-19
中国火炬(2010年7期)2010-07-25
