无人船在水库库容监测中的应用
2019-02-27 08:07王智明张文峰白艳超
城市勘测 2019年1期
王智明,张文峰,白艳超
(宁波市测绘设计研究院,浙江 宁波 315042)
1 引 言
宁波市的城市供水基本依靠分布于宁波市范围内的饮用水源水库,宁波市的水库系统不仅承载着整个城市的供水安全,还具有防洪、蓄水以及灌溉农田等功能,具有非常重要的民生保障意义。水库的实时容量直接显示水库的实时承载量,是大坝安全、降水再承载能力、供水及灌溉能力的直接依据,是水库运营管理的重要参考数据。水库库容不是一个直观的观测量,而是一个由观测水位和水下地形计算出来的值。本文通过宁波市测绘设计研究院引进的方洲号无人船测量水库水下地形并结合全站仪测量的水面以上地形精确计算出水库库容量V与瞬时水位h的一一对应关系:
V=f(h)
这样可以使水库库容直接通过读取水位查表得到,让库容实时监测变得更加直观。
传统的水库库容测算方法是在水库建设过程中实施的,一般在水库建成还未正式蓄水前采用全站仪或GPS对水库进行一次全面的地形测绘,根据所测地形计算水库库容。由于水库上游河流的冲刷、泥沙淤积沉淀,当初的地形已不能满足水库精细化管理运营的需求。例如,宁波某水库已投入运营三十多年,水下地形淤积逐年累积,原来的库容与水位的函数关系发生了一定的变化,需要重新进行测量和计算。
2 无人船系统简介
本文采用的无人船测量系统主要由玻璃钢三体无人船平台、通信系统、控制系统、岸基控制系统,定位与导航系统和测深系统组成。无人船系统所具有的高效、安全、轻便等特点使其成为水库、池塘等水下地形测量的新趋势。无人船系统除了装备有正常的航行设备外,还配置了自主导航、智能壁障、VHF无线电通信以及自动数据采集等功能。在一定条件下可以实现全自动测量,减少了人工干预,能更加客观地展示水下地形的样貌[1~3]。
(1)测深工作原理
水深的测量是依靠集成于无人船船底的负责声波发射与接收的换能器和负责声波信号处理的微电脑组成。换能器垂直向下发射一束声波,声波在水底发生反射折回并由测深仪换能器接收,微电脑根据声波的发射和接收的时间差△t以及声波在水中的传播速度V自动计算出测点的水深D,原理公式如下[4~6]:
D=(V×△t)/2
(2)水底高程计算
如图1所示为无验潮模式水深测量原理图,途中标示出了GPS天线相位中心高程H、GPS天线相位中心到测深仪吃水零点高度h测深仪测量的水深D以及水底高程G之间的几何关系。水底高程计算公式如下:
G=H-h-D
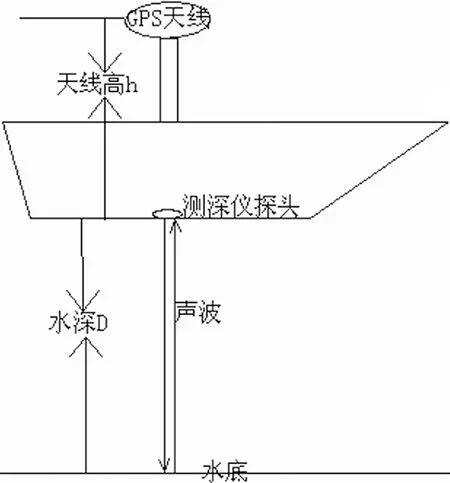
图1 测深原理图
采用无验潮模式计算水库水下地形点的高程有诸多优点:①不用测量水面高程;②由于GPS随无人船同升同落,无验潮模式可以有效消除波浪上下起伏的影响,提高测量精度;③无验潮模式可以不用准确测量换能器吃水,可以有效消除水深测量中动态吃水的影响。
3 库区地形测量
库区地形测量分水面以上地形测量和水面以下地形测量两个部分,水上地形和水下地形可以同时进行,也可以在枯水期和丰水期分别施测让两次测量有一部分重叠以提高库容计算的精度。
(1)水上地形测量采用全站仪无棱镜测量模式,直接测定水上地形特征点的高程,一般选择冬季枯水期且杂草较少的季节施测,有杂草的重要地形特征点需要切换为有棱镜模式人工跑点测绘,确保水库水面以上地形准确、全面采集到位。
(2)水下地形测量
水下地形测量采用智能无人船一体化测量系统,一般选择夏秋季丰水的季节、风平浪静的天气施测。施测步骤如下:
①设备安装与测试。在施测前需对GPS的一致性和稳定性、测深仪的一致性和稳定性以及系统集成情况进行测试。
②声速剖面测量。声波在水介质中的传播速度并不是一成不变的 1 500 m/s,而是随着水体温度、无机盐含量、水深等因素的变化而变化的,少部分的测量单位未配备声速剖面测量设备,这无疑增加了测量的误差。经计算,当水库水深5 m的时候,因声速而造成的误差可能在 10 cm左右。声速剖面测量采用声速剖面仪,每 0.5 m水深记录一次声速值,记录如表1所示:
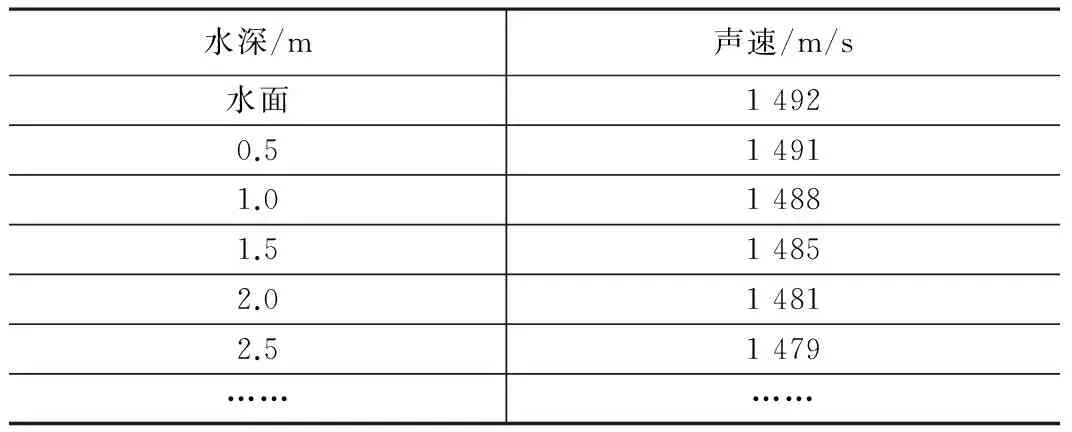
声速剖面记录表 表1
③水域范围划定。用遥控器指导无人船围绕水库边缘一圈,并实时记录位置,划定需要测量的水域面。
④测线自动布设并上传数据。根据步骤③绘制的水域范围线和测图比例尺,岸基控制系统软件会根据设置的测量水域范围和测线间隔自动布设测线,自动设计包括返航的无人船航行路径。测线和路径等设置信息通过VHF无线电通信上传到无人船的微电脑。
⑤开始测量。所有参数设置完毕并上传信息成功后,无人船遥控器拨到自动测量模式,鼠标点击岸基控制系统软件的自动测量按钮,即可开始自动进行测量和数据采集。
⑥声速改正。由于本文所使用的智能无人船尚不支持声速剖面数据改正,所以首先需对采集的数据进行声速改正。测量时声速设置为 1 500 m/s。声速改正原理公式如下:
式中,D为改正后的水深,D′为原始水深,v为平均声速。
该过程可以通过VC++编程来实现,每一处的平均声速v都会因为D′的不同而不同,所以每一次循环都会根据声速剖面重新计算一次平均声速。程序界面如图2所示:
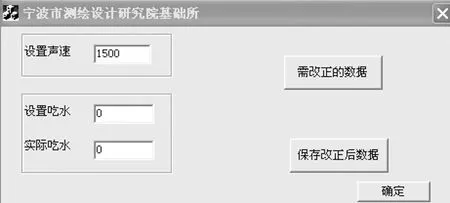
图2 声速改正程序界面
⑦数据处理。采用无验潮数据处理方法,根据图1的几何关系,使用智能无人测量船自带软件处理各测量点的高程值,统计主测线与检查线的不符值,并对粗差进行剔除,水深图如图3所示。
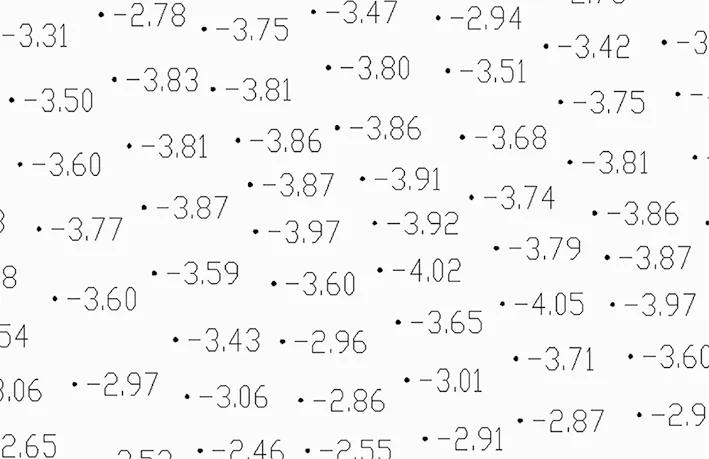
图3 水深图
⑧数据接边融合。将无人船测量的水下地形和全站仪测量的水上地形进行接边融合。数据重合部分一般取全站仪和GPS测量的高程。将融合后的数据生成符合南方测绘CASS展点格式的数据文件。若在丰水期和枯水期分别测量了水下地形和水面以上地形,可以对重合区域进行数据比对,以全站仪和GPS测量的高程为真值,计算同名点水下地形测量高程值的中误差,可以评定水下地形测量的精度。
4 各水位库容计算
库容的计算方法一般有DEM法、不规则三角网法、断面法、等高线法等。国内外学者已经就各方法的优缺点、适用性、计算精度等进行了大量研究。目前市面上有很多成熟的商业软件,因此本文未对库容计算进行编程,而是使用成熟的ArcGIS DEM法。利用ArcGIS的模型构建器建立批量库容计算模型迭代,计算各水位下的库容量[7~9]。水位库容对应关系如表2所示:
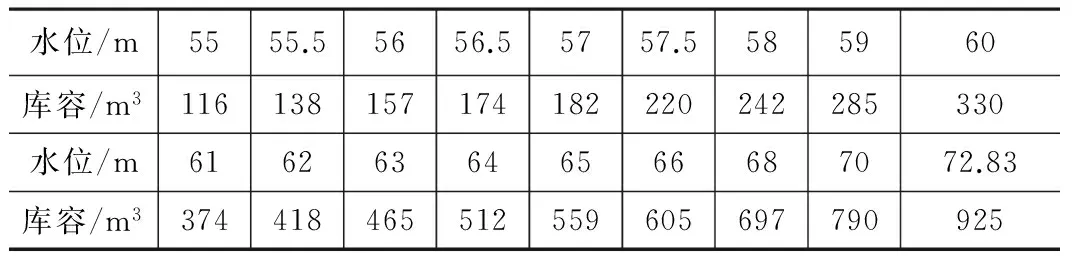
水库水位库容对应表(部分) 表2
5 水位-库容关系图绘制
以水位为横轴,以库容量为纵轴,根据ArcGIS中计算的水位库容对应表格绘制水位与库容的曲线图,如图4所示(为方便显示,横纵坐标比例设置不同)。水位越高,水库淹没面积越大,库容量的增加越快。
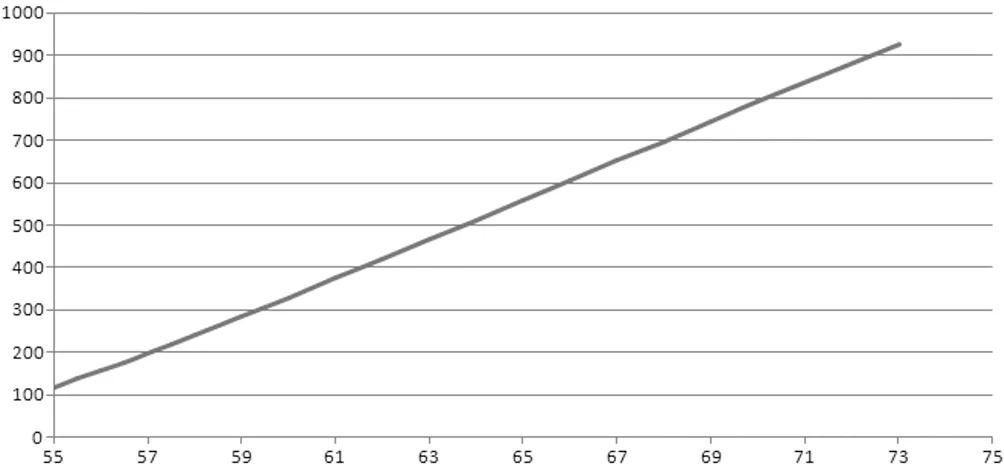
图4 水深图
6 结论与建议
小型无人船在水库、池塘等水深测量中有很大的优势,本文应用无人船在水库地形测量中得到了很好的效果。
由于本项技术投入运行时间较短,缺乏大量的集成测试,所以尚有需要改进的方面。第一,VHF无线电通讯具有视线盲区,一旦进入盲区将不能继续测量,建议测量与岸基通讯分离,自主测量过程中由船载存储保存数据。第二,增加声速剖面输入功能。第三,无人船遥控和无线电通讯存在信号干扰,建议调整通讯波段。
猜你喜欢
河北水利(2022年10期)2022-12-29
水利水电快报(2022年10期)2022-11-23
海洋通报(2022年4期)2022-10-10
海洋信息技术与应用(2022年1期)2022-06-05
城市道桥与防洪(2019年5期)2019-06-26
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
河南水利年鉴(2016年0期)2016-08-03
浙江国土资源(2015年4期)2015-05-09
航空学报(2015年4期)2015-05-07
航空学报(2015年4期)2015-05-07