基于干扰观测器的永磁同步电动机滑模控制
2019-02-25 02:23:12颜渐德兰永红罗胜华
微特电机 2019年1期
颜渐德,王 辉 ,兰永红,罗胜华
(1.湖南大学,长沙 410082; 2.湖南工程学院,湘潭 411101;3.湘潭大学,湘潭 411105; 4.湖南电气职业技术学院,湘潭 411101)
0 引 言
永磁同步电动机(以下简称PMSM)因其具有能量密度高、效率高、可靠性高等优点,在交流驱动系统中得到广泛的应用。然而,PMSM是典型的多变量和强耦合的非线性系统、存在参数摄动、外部干扰等不确定因素,导致PMSM控制系统的动态性能下降。如何寻求有效的控制策略,克服PMSM系统的外部干扰以提高系统的性能,引起了国内外学者的广泛关注[1]。
近年来,许多学者在提高PMSM的速度跟踪性能上,提出了许多控制策略,如:矢量控制[2]、反推控制[3-4]、自适应控制及无源控制等[5-7]。文献[4,8]针对PMSM矢量控制系统,通过构造新的子系统,并选取合适的虚拟变量和虚拟控制函数,利用李雅普诺夫稳定性理论设计控制量,从而使系统具有全局稳定性,实现良好的系统跟踪。滑模变结构控制算法简单、鲁棒性好和可靠性高,对提高动态特性效果明显[9-11]。文献[12]设计了一种积分时变滑模变结构的速度环控制器,解决了传统PID控制器鲁棒性差、系统抗扰能力弱和动态响应性能不佳的问题。文献[13]对PMSM的无速度传感器控制进行研究,对滑模速度观测器进行了改进。为了减小延时并提高伺服系统电流环控制性能,文献[14]提出了一种基于无差拍控制原理的PMSM鲁棒预测电流控制算法。文献[15]为了增强系统的抗干扰性,提出了一种用于表面式PMSM的上下界滑模变结构速度控制方法。文献[16]提出一种扰动补偿控制方法。总之,以上方法具有较高的跟踪精度和鲁棒性,由于设计过程中没有对外部干扰进行估计,系统中参数微小变化或存在外部干扰时,系统的速度会存在一个较大的过冲,从而使得系统跟踪性能下降。
受以上文献启发,本文提出一种基于干扰观测器和滑模控制器相结合的PMSM速度控制方法。设计基于指数趋近律的滑模控制器,以提高电机系统的静态和动态跟踪性能。为了补偿负载干扰,进一步设计基于干扰观测器(以下简称DOB)的反馈控制特性。仿真与实验表明,本文的方法提高了PMSM控制系统速度跟踪精度,对负载干扰具有较好的抑制效果。
1 PMSM的数学模型及问题描述
为了简化分析,首先做如下假设:气隙中转子永磁磁场为正弦波;定子铁心不饱和,忽略涡流和磁滞损耗;转子上无阻尼绕组。在以上假设下,得到PMSM在d,q坐标系下的数学模型,其电压方程[3]:
(1)
式中:Ld,Lq分别为交、直轴电感;Rs为PMSM的定子电阻;ω为PMSM的角速度;ψf为交链磁链;uq,iq为PMSMq轴上的电压与电流分量;ud,id为PMSMd轴上的电压与电流分量。
PMSM的转矩方程:
(2)
式中:Te为PMSM的转矩;p为PMSM的极对数。对于隐极式PMSM,有Ld=Lq,因此可将PMSM的转矩方程简化:
(3)
PMSM的运动方程[3]:
(4)
式中:J,B分别为系统的转动惯量和摩擦系数;TL为系统的负载转矩。
将式(4)代入式(3),可得:
(5)
式中:J=J0+ΔJ,TL=TL0+ΔTL,J0和TL0是系统参数的确定值,ΔJ和ΔTL表示系统参数的不确定性。
考虑到电机参数变化及未建模不确定性,式(5)可以进一步表示:
(6)
式中:Δa,Δb,Δc为系统参数不确定性摄动。

(7)
式中:d为不确定性干扰。
PMSM系统要求输出速度响应快、运行平稳,具有较高的速度跟踪精度。然而实际运用中,没有考虑外界干扰(如式(7)中的d),会导致系统速度跟踪精度下降,从而影响PMSM控制系统性能。为了保证系统具有良好的稳定性和鲁棒性。本文提出一种基于DOB的滑模控制器,以提高PMSM控制系统的跟踪精度及外部干扰抑制能力。其控制系统结构框图如图1所示,图1中,ω*为给定转速,e为速度误差,SMC为滑模控制器。
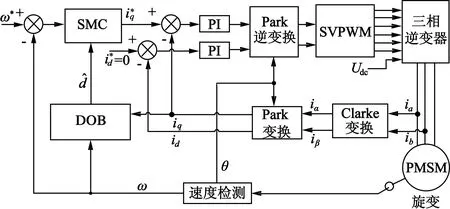
图1 基于DOB与SMC的结构框图
2 控制系统设计
2.1 滑模控制器设计
针对标称系统式(7),即d=0,定义滑模面:
(8)
式中:λ为正常数。
对式(8)求导,可得:
(9)
趋近律函数采用指数趋近律:
(10)
式中:sat(·)为削弱抖振的饱和函数:
(11)
选取李雅普诺夫函数:
(12)
为抑制不确定的干扰,将DOB观测到的干扰估计引入控制器,由式(9)和式(10),基于干扰补偿的滑模变结构控制律,q轴参考电流可设计:
(13)
对V2关于时间求导,根据式(9)有:

(14)
(15)
根据李雅普诺夫稳定性,闭环系统渐近稳定。因此在有限时间内,位置跟踪误差都将达到边界层。由式(8)和式(11)可知,速度跟踪误差的边界可以限定:
2.2 DOB的设计

常见的DOB结构框图如图2所示。

图2 DOB结构控制框图

(16)
另外,由图2可以得出如下输入输出关系:
y=Gny(s)u+Gdy(s)D(s)
(17)
式中:
(18)
(19)


3 仿真与实验结果
3.1 仿真结果
为验证PMSM控制系统中,基于DOB的滑模控制器(DOB-SMC)的有效性,应用MATLAB/Simulink软件进行了仿真。PMSM的主要参数如表1所示;控制系统其他参数:摩擦系数B=0.008 N·m·s/rad,转动惯量J=0.000 35 kg·m2;控制器参数设置:λ=2 000,k=150,ε=500。
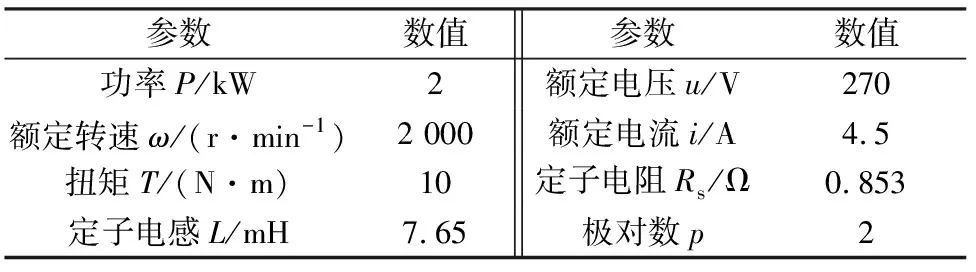
表1 永磁同步电动机参数
上述PMSM系统简化后得到速度环名义模型传递函数[17]:
(20)
为满足DOB设计条件,本文采用3阶低通滤波器[18]:
(21)
式中:τ为时间常数,决定Q(s)的截止频率。
初始给定转速为1 200 r/min,在0.6 s时给定速度为1 000 r/min,在0.8 s,加入了一个负载干扰。图3给出了SMC与DOB-SMC的速度响应波形。实线和虚线分别为采用SMC与DOB-SMC的速度跟踪曲线,由图3可以看出,SMC与DOB-SMC电机的转速跟踪性能良好,但当有负载或干扰时,DOB-SMC比SMC更快地达到稳定,且过冲更小。因此,DOB-SMC的干扰抑制效果明显。
图4为SMC与DOB-SMC的电磁转矩响应波形。图5,图6分别为SMC与DOB-SMC的三相电流波形。当速度瞬间变化时,三相电流会有尖峰,对应的转矩与电流成正比。
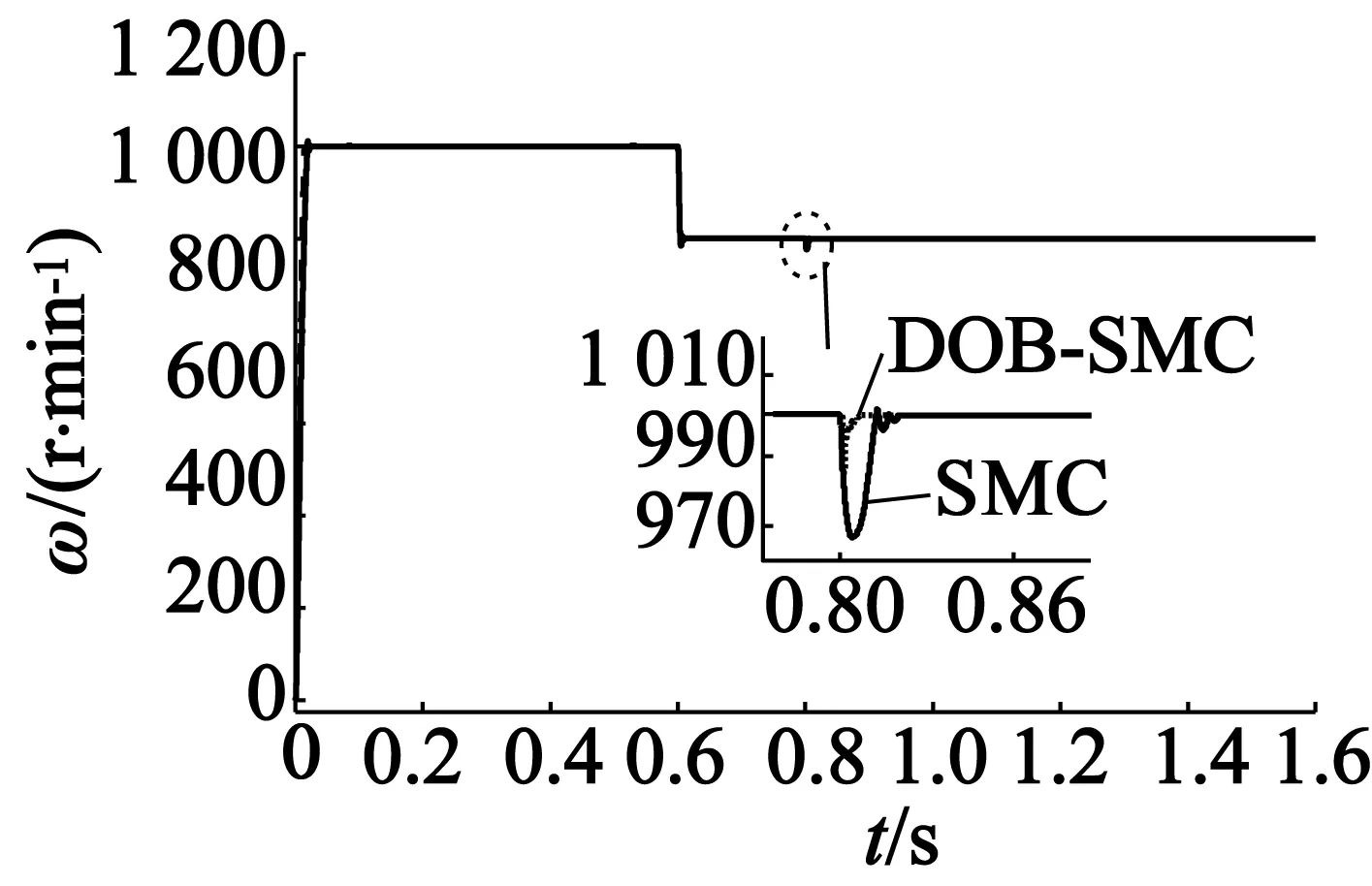
图3 SMC与DOB-SMC的速度响应
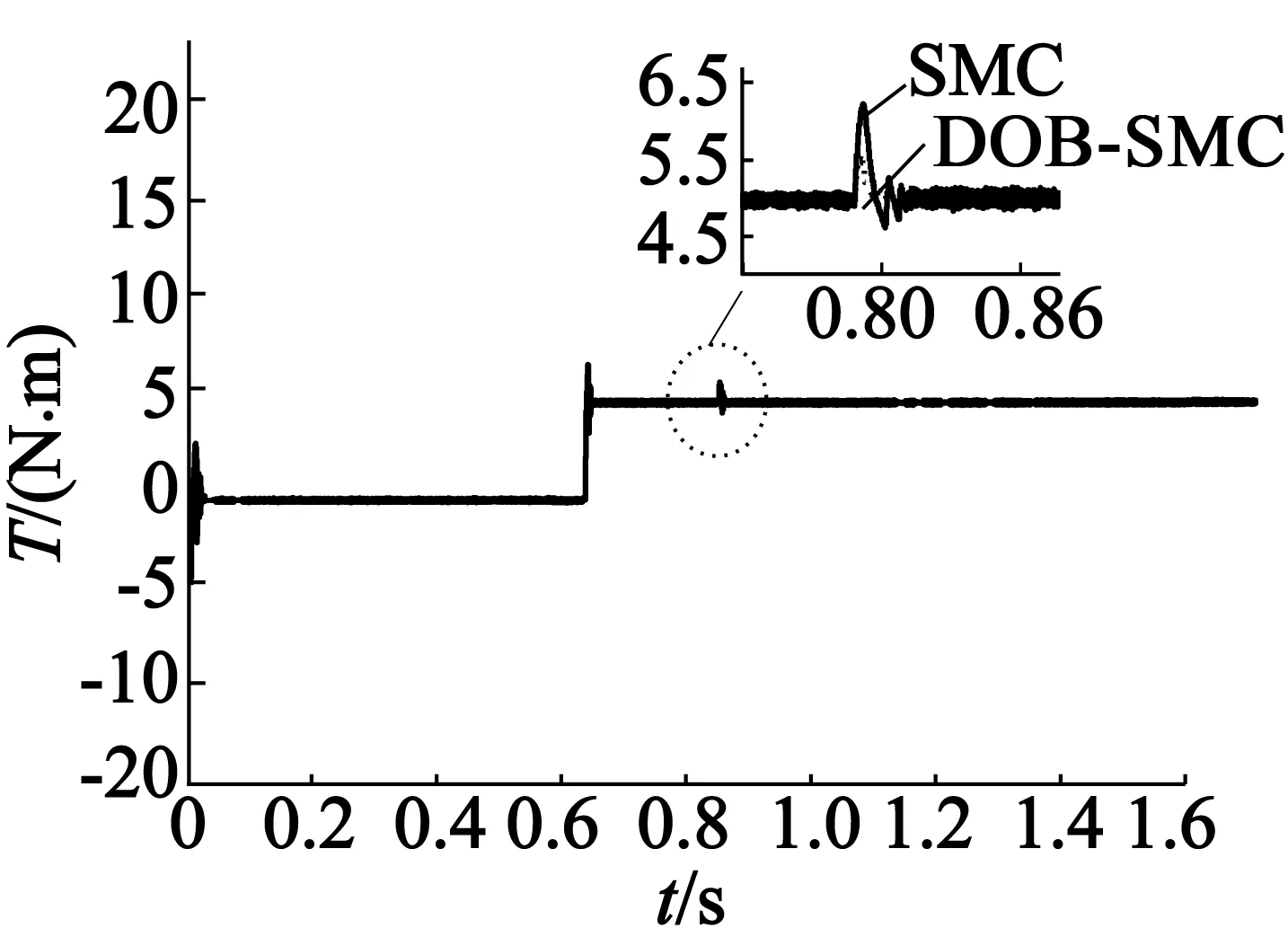
图4 SMC与DOB-SMC的电磁转矩响应

图5 SMC的三相电流波形
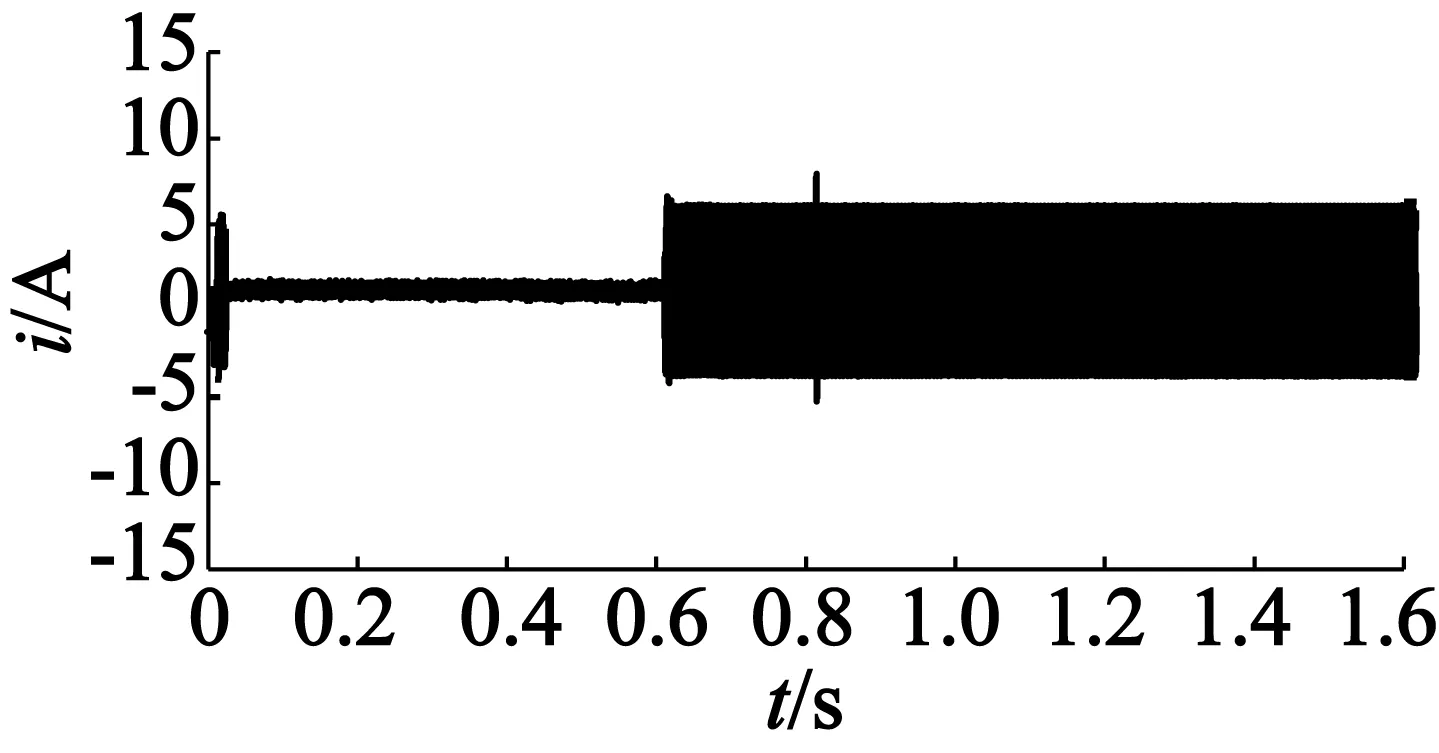
图6 DOB-SMC的三相电流波形
综上所述,本文的速度跟踪控制方法,能及时跟踪电磁转矩和给定的转速,使系统具有响应快,超调小,抑制负载干扰强等优点。
3.2 实验结果
PMSM实验平台如图7所示,平台中有2台PMSM,其中1台PMSM工作在电动状态,另1台PMSM工作在发电状态来模拟负载,负载大小由上位机软件调节,电机参数如表1所示。采用TI公司的DSP处理器TMS320F28035,功率器件采用英飞凌智能模块IPM。需要观测的数据可以通过软件设置在DSP主控板的模拟输出。

图7 永磁同步电动机实验平台
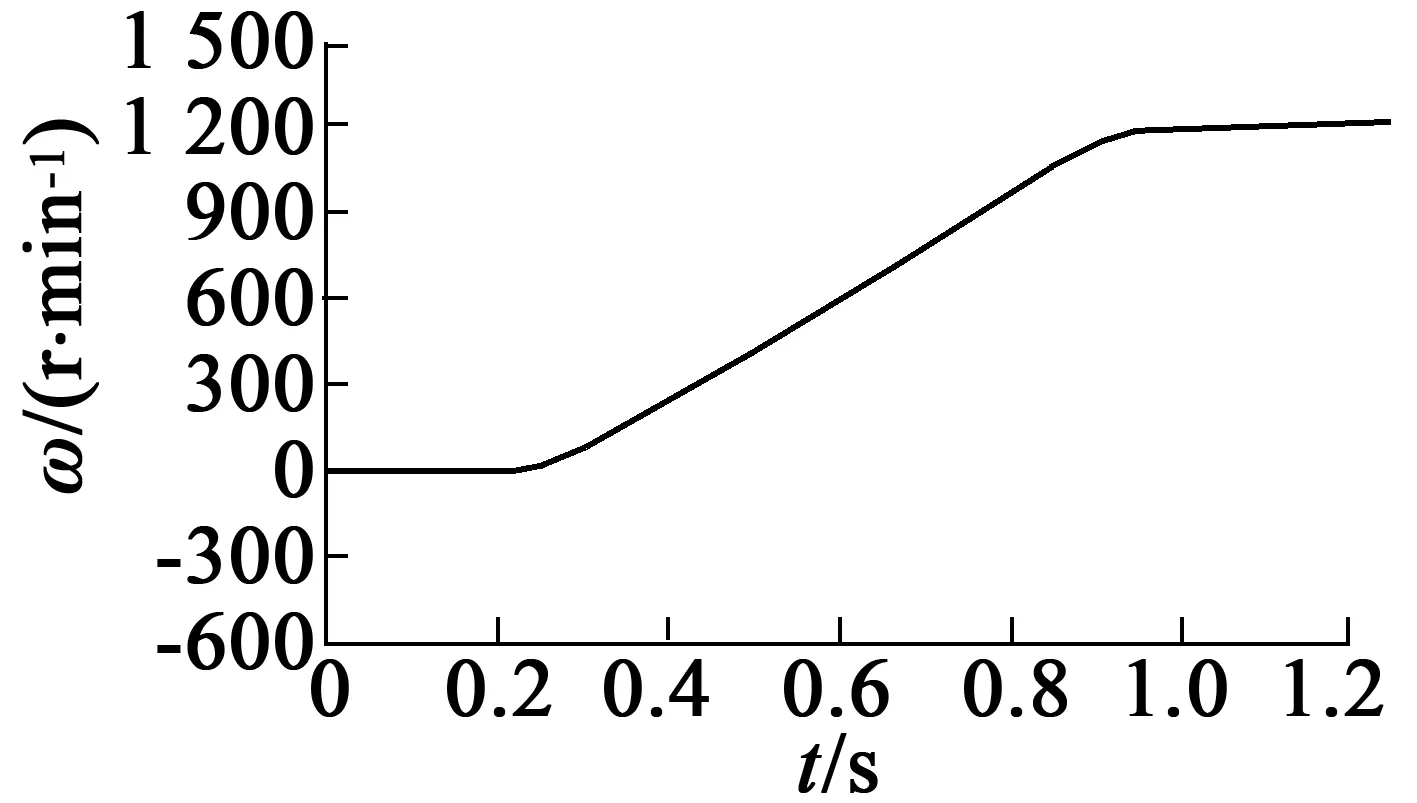
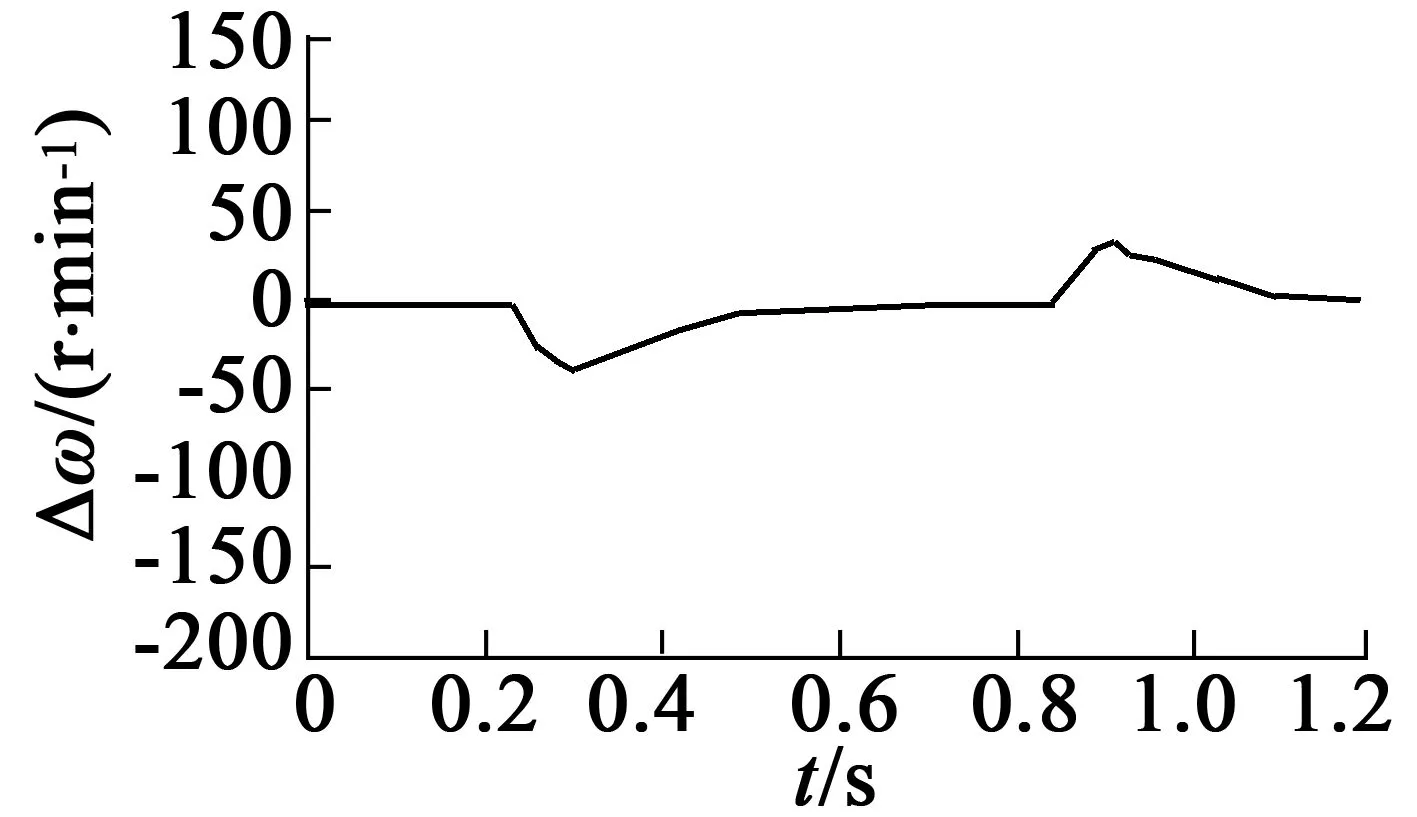
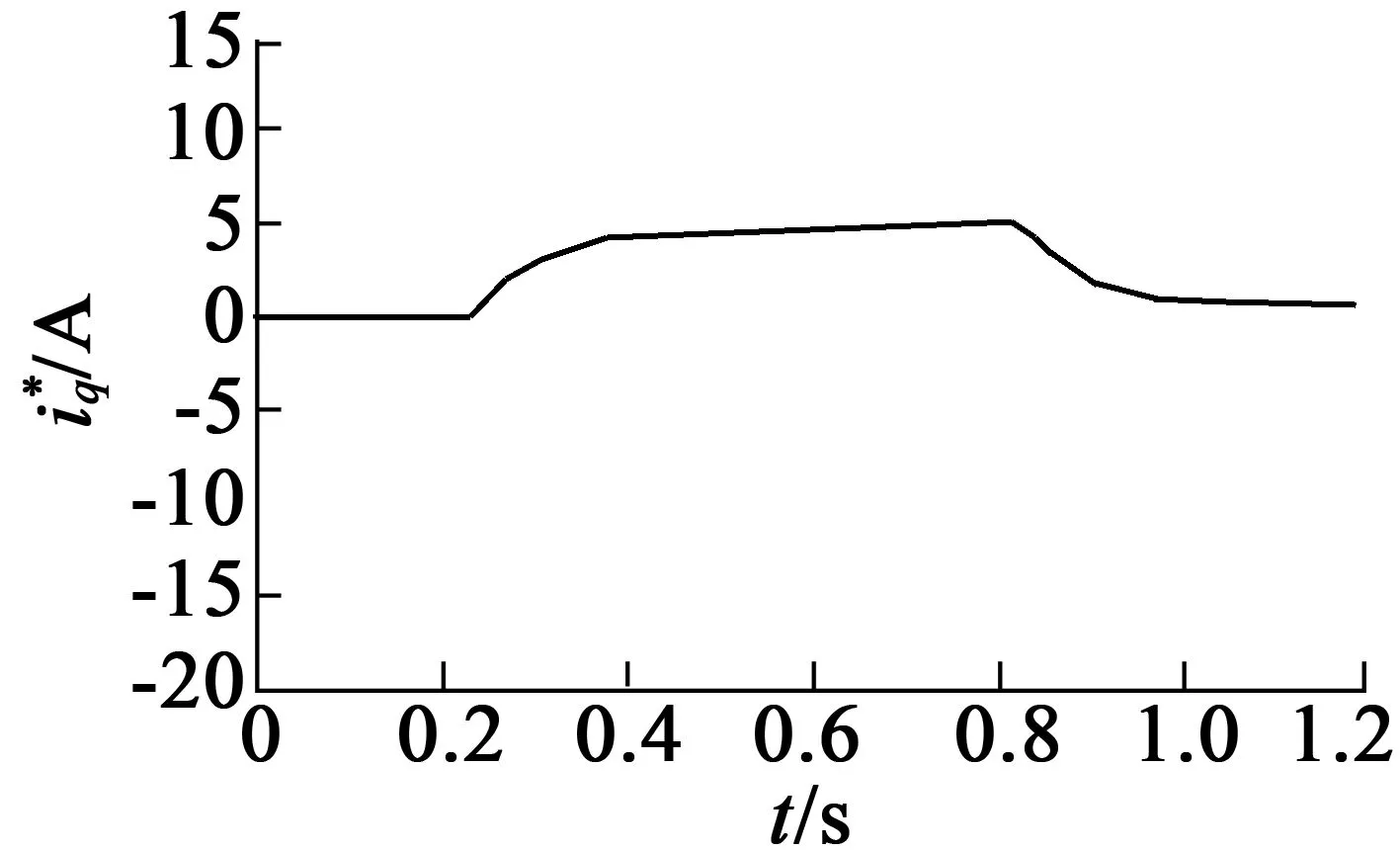
电机初始速度为0,从0.25 s开始均匀增速,到0.9 s时速度达到1 200 r/min,负载为0。图8、图9分别为SMC和DOB-SMC的实验波形。由图8的速度跟踪误差曲线可以看出,传统SMC的速度跟踪误差从0.25~0.5 s时间内速度存在误差,速度误差幅度最大达到40 r/min。由图9的DOB-SMC速度跟踪误差曲线可以看出,从0.2~0.35 s时间内速度也存在误差,速度误差幅度最大达到20 r/min。图10(b)中DOB-SMC的q轴参考电流波形,明显比图10(a)中传统SMC的电流波形平滑。
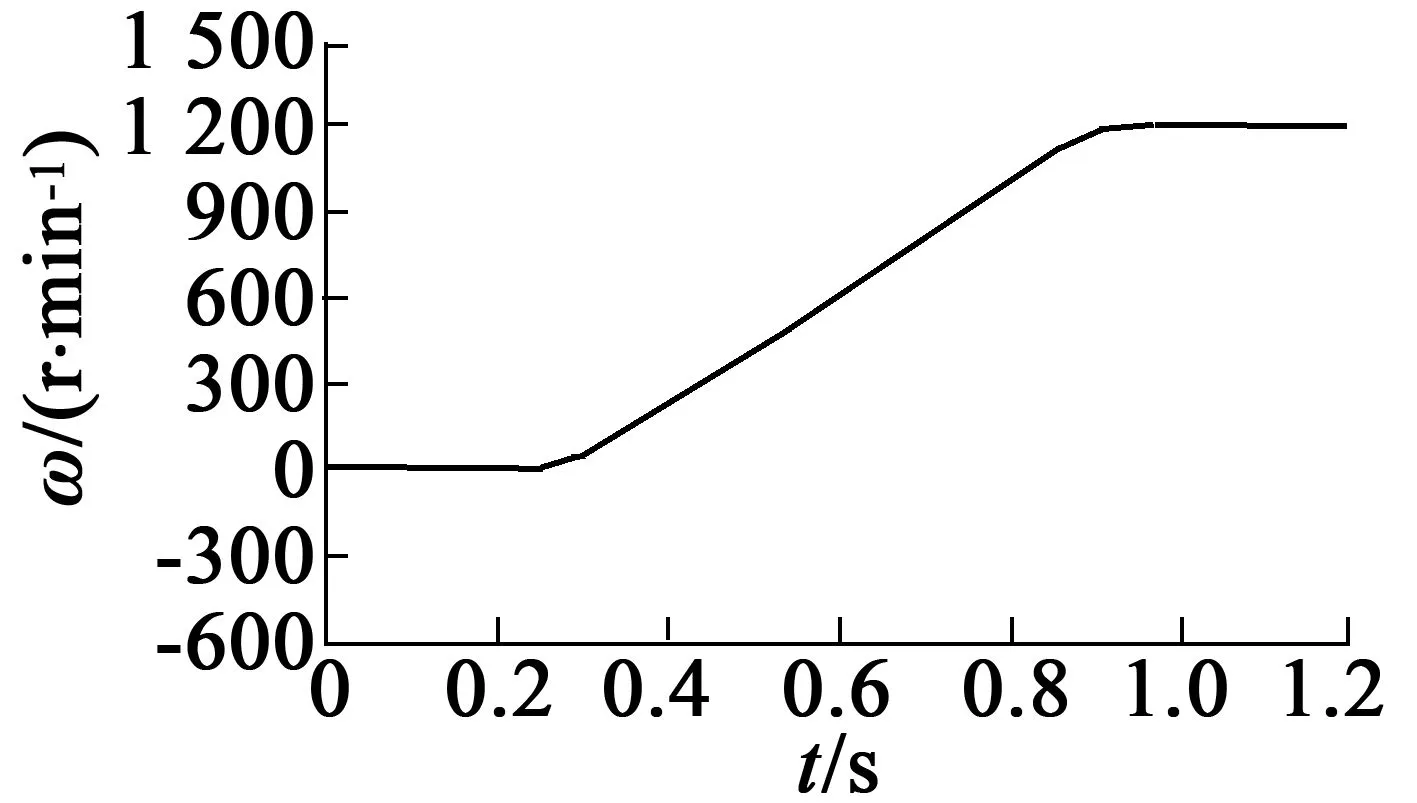
(a) SMC
(b) DOB-SMC
(a) SMC

(b) DOB-SMC
(a) SMC

(b) DOB-SMC
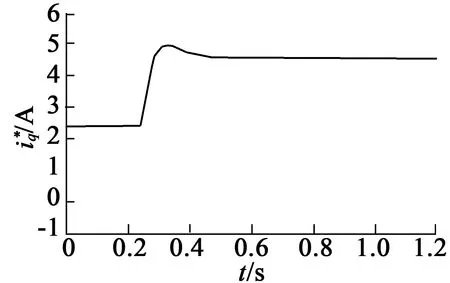
电机初始速度为1 000 r/min,负载为5 N·m,在0.25 s时将负载转矩增加至10 N·m,传统SMC与DOB-SMC速度响应与控制器输出的q轴参考电流分别如图11、图12所示。图11(a)中,在0.25 s时,负载转矩增加到10 N·m时,传统SMC速度最低为860 r/min,在0.48 s时达到稳定,调节时间为0.23 s;图12(a)为传统SMC输出的q轴参考电流,最大为5 A。由图11(b)为基于DOB-SMC速度最低为880 r/min,在0.35 s时达到稳定,调节时间为0.1 s,图12(b)为基于DOB-SMC输出的q轴参考电流,最大为4.8 A。由此可得出,本文的方法控制效果明显,具有较高的跟踪精度和响应速度。

(a) SMC

(b) DOB-SMC
(a) SMC

(b) DOB-SMC
4 结 语
本文采用滑模变结构控制与DOB相结合的控制方法,利用基于指数趋近律的SMC,进一步提高电机系统静态和动态跟踪性能,通过基于DOB的反馈控制器来补偿负载干扰,提高系统的快速响应性,从而使PMSM控制系统具有更好的鲁棒性。仿真与实验结果表明,本文的方法与普通的滑模变结构控制相比,速度达到稳定的时间缩小一半,并且速度的过冲幅度进一步减小。因此本文的方法具有较高的跟踪精度和响应速度,对参数变化和外部扰动的鲁棒性强,具有较高的综合控制性能。
猜你喜欢
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
四川冶金(2018年1期)2018-09-25 02:39:26
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59