考虑初稳心高摄动的船舶旋回性能分析
2019-02-24 05:30吕蒙蒙IMNankyun
中国航海 2019年4期
张 强, 吕蒙蒙, IM Nankyun
(1.山东交通学院 航海学院, 山东 威海 264209;2.木浦国立海事大学 航海学院, 韩国 木浦 530729)
船舶的初稳心高度(Metacentric Height,GM)值对于船舶货物安全运输至关重要。由于船舶在航行中燃油消耗、压载水调驳、货物舱位垂向调换,引起船舶hGM的变化[1],同时极区航行的船舶甲板表面覆冰严重,可使船舶hGM发生显著变化,甚至有造成倾覆危险。[2]在运输易流态货物时,货物流态化后形成的自由液面会使船舶的稳性降低,因此,研究船舶hGM摄动情况下的船舶旋回性能,对于船舶安全操纵具有重要意义。
1) 在船舶稳性研究方面,周剑锋等[3]通过自由液面修正计算,得出船舶稳性与不同货物密度之间的关联性,为确保船舶安全运输提供参考。ANDREI等[4]针对船载散装货物流态化后的船舶稳性问题,提出计算货物发生移动概率和横倾力矩的方法。翁建军等[5]从第一代稳性衡准的稳性失效模式的评估方法及其与船舶静态参数、动态参数的关系入手,分析基于第二代稳性衡准的船舶操纵性能,提出确保稳性满足要求的操纵技术和措施。
2) 在船舶旋回性能方面,DAVIDSON等[6]给出旋回性和航向稳定性的系数。夏国忠等[7]利用大型船舶操纵模拟器分析得出影响超大型船舶旋回性能的主要因素。针对船舶在港口水域的安全引航问题,于长江等[8]根据不同载况对船舶旋回性能的影响,利用一阶船舶操纵运动仿真模型,实现对船舶旋回圈的模拟,结合模拟试验的结果,给出载况对旋回性能的影响。FITRIADHY等[9]考虑到拖带船在旋回过程中所受到的横向力和转艏力矩,提出新的拖带系统的数学模型,通过船模试验对比分析,验证该数学模型的有效性。
随着船舶大型化、自动化和智能化的发展,船舶旋回性能的优化问题得到进一步的关注。ZHANG等[10]针对船舶的大型化问题提出对威廉姆旋回操纵的改进建议。同时,该团队根据船舶旋回性指数,利用所提出的闭环增益成形算法设计船舶自动舵,试验证明具有良好的鲁棒性和鲁棒稳定性[11-13],但该研究所采用的旋回性指数属于定常值,在船舶稳性参数摄动时,旋回性指数势必发生变化,故控制器参数需要不断修正。为进一步优化船舶自动舵算法,本文尝试获得稳性参数摄动与旋回性能的关系函数。目前,相关研究主要集中在外界干扰条件下船舶倾覆和稳性下降的关联性问题,而非船舶稳性和操纵性能的关联性研究,且此类研究多采用计算机仿真,较少使用船舶模型试验。随着智能技术的发展,许多学者[14-15]依托自航模平台对船舶自动导航系统和无人驾驶船舶技术进行深入的研究。本文通过自航模试验,对稳性参数摄动的船舶旋回性能进行分析,并给出GM摄动与旋回性能间的关系函数。
1 KVLCC1自航模试验平台
KVLCC1是国际拖曳水池会议(International Towing Tank Conference,ITTC)提出的国际标准化船模。本文所采用自航模试验平台主要包括船体、螺旋桨、舵、差分全球定位系统(Differential Global Position System,DGPS)、主控板、无线局域网和(Inertial Measurement Unit,IMU)、无线电操控装置(Radio Control,RC)等。
1.1 船体
本文采用的KVLCC1型自航模的缩尺比为1/100。自航模参数见表1。所模拟的实船为超大型油船,其两柱间长Lpp为320 m,设计速度为15.5 kn,吃水深度为20.8 m,排水量为31万t。
1.2 舵和螺旋桨
KVLCC1为单车单桨船,螺旋桨和舵的参数见表2。根据设计图纸,利用3D打印和CNC(计算机数字控制机床)雕刻技术制作舵和桨。舵和螺旋桨的设计图纸见图1和图2。
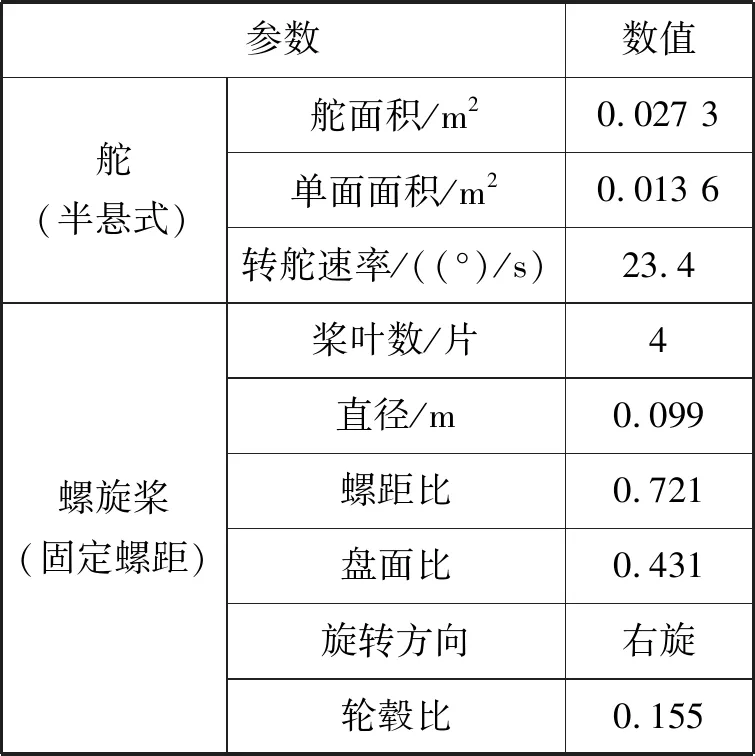
表2 舵和螺旋桨的参数

图1 舵的设计图纸
1.3 系统组成
自航模的结构包括岸基无线电控制器,内部[16]有传感器主电力系统、设备控制系统、数据收集系统、通信系统、操纵系统。内部各个系统的框架见图3。为满足实际要求,研发小型无人艇专用控制板。该控制板具有9 250九轴、混控信号切换模块等多种功能模块和丰富的自定义接口;匹配大量底层驱动软件与控制算法软件,用于控制船舶的全部系统,具有兼容性强和稳定性高的特点。
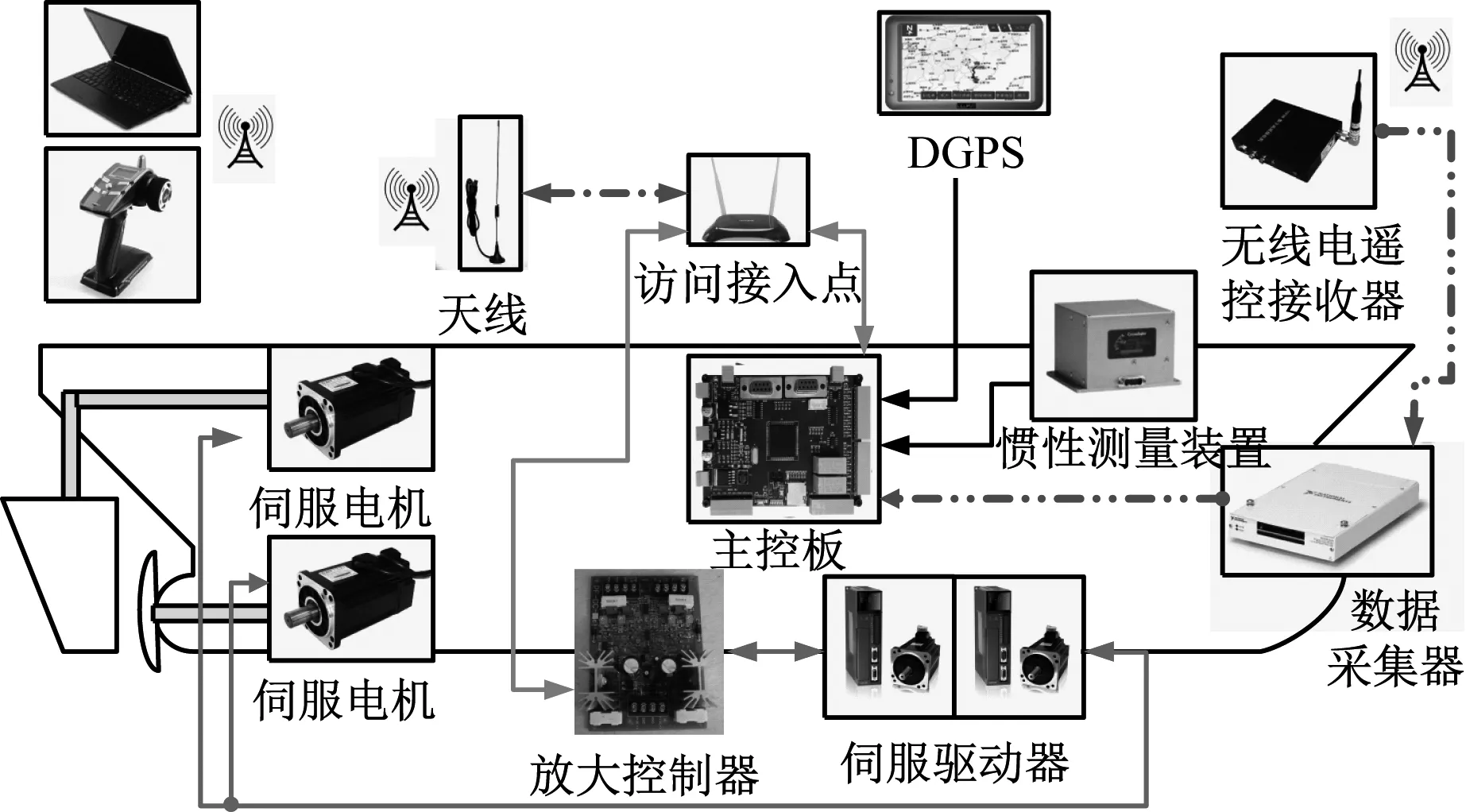
图3 自航模控制系统框图
2 自航模hGM摄动旋回试验
本试验是在国际海事组织(International Maritime Organization,IMO)的船舶操纵性试验标准的基础上,通过移动压载块高度来实现自航模hGM值的变化,在不同hGM值下进行旋回试验,并进行定量分析。
市政府发布《上海市取水许可和水资源费征收管理实施办法》,明确市取水总量控制指标控制管理。《上海市地面沉降管理条例》的出台,进一步强化了地下水管理。市水务局印发《上海市取水设施现场核验规定》《上海市取水口标识管理规定》《关于上海市实施建设项目水资源论证分类管理通知》《上海市工业区块规划水资源论证管理办法(试行)》,编制完成《上海市取水许可审批手册》,有效促进取水管理工作有章可循。
2.1 试验条件
根据IMO船舶操纵性能标准MSC.137(76)[17],确定船舶旋回试验条件,试验中船舶装载情况和外部环境条件,见表3。
在船舶吃水、速度和纵倾等相同试验条件下,设计以船舶hGM为变化因子的试验参数,其值分别为0.040 m、0.030 m、0.015 m、0.013 m、0.009 m、0.006 m和0.003 m。
2.2 试验方法
IMO规定的船舶旋回性能试验是通过操一定舵角时的旋回圈来判断船舶的旋回性能的。旋回性

表3 IMO试验条件标准
能的参数为进距(Advance Diameter,DA),旋回初径(Tactical Diameter,DT)等。具体的实施方法如下:
在船舶匀速前进的状态下,使用最大舵角或者35°舵角,并维持该舵角,船舶将进行旋回运动,该运动轨迹称为旋回圈。本文自航模旋回试验是在表3的试验条件下使用35°舵角进行试验。
通过对舵、桨的控制实现船舶旋回性能测试。船舶重心的高度计算为
(1)
式(1)中:KG为自航模重心距基线高度(Height of Centre of Gravity);Pi为自航模内第i个装置的重量;Zi为自航模内第i个装置的重心距基线高度;Δ为自航模的排水量。
试验前调整自航模的重量分布,并计算出船舶GM值为
hGM=KM-KG
(2)
式(2)中:自航模稳心距基线高度(Height of Metacentre,KM),是浮心距基线高度与稳心半径之和,可在自航模参数中查取。利用压载重块调整吃水为平吃水,且试验速度为1.5 kn。
3 试验结果及验证
通过数据收集系统获取船舶轨迹、舵角和螺旋桨速度等试验数据,试验结束后对这些数据进行分析。
3.1 试验结果
使用MATLAB工具箱,以自航模试验的起点为原点绘制成散点图,见图4。
结果表明:hGM越小,DA和DT就越小,但是7种情况的旋回初径、横距没有明显变化。
表4给出了7个试验场景的船舶DA和DT的变化规律。在hGMmax=0.040 m的情况下,DA和DT分别为3.43Lpp和2.78Lpp。在hGMmin=0.003 m的情况下,DA和DT分别为2.90Lpp和2.12Lpp。

图4 旋回试验轨迹
表4 旋回试验中的DA和DT

自航模实船DA/LppDT/Lpp0.0404.03.432.780.0303.03.392.620.0151.53.282.500.0131.33.172.340.0090.93.032.250.0060.62.972.200.0030.32.902.12
试验表明如hGM减小,DA和DT也减小。为进一步对hGM下降后DA和DT减小的趋势进行定量分析,对7组试验的hGM以及对应的DA和DT进行无量纲化处理,即
(3)
(4)
式(4)中:hGMmax为hGM的最大值;DA,GMmax为hGM为最大值时的DA。用MATLAB拟合得到的曲线见图5和图6。

图5 hGM′与D′A回归曲线图6 hGM′与D′T回归曲线
为进一步分析图5和图6中的下降趋势,通过MATLAB软件对图5和图6中回归曲线进行公式拟合,所得拟合后的公式见表5。
DA和DT的下降趋势有所不同如表5所示,DA的下降趋势接近于二次多项式,DT的下降趋势接近线性函数。

表5 hGM摄动下的旋回性能趋势
(5)
(6)
hGM参数摄动后的DA和DT可通过式(5)和式(6)计算出来。具体计算方法为
(7)
(8)
式(7)和式(8)中:DA1为hGM参数摄动后的DA,hGM1为hGM的摄动值,其值由式(2)计算可得,其中KG可由式(1)计算,KM可通过静水力曲线图或静水力参数表查出。联合式(5)、式(7)和式(8),可得
DA1=(-0.3hGM′2+0.49hGM′+0.81)·DA0
(9)
式(9)中:DA0为hGMmax对应的DA。
同理可得DT1(hGM参数摄动后的DT)
DT1=(0.24hGM′+0.77)·DT0
(10)
式(10)中:DT0为hGMmax对应的DT。
3.2 数据验证
利用本次试验的第4组(hGM=0.009 m)和第5组数据(hGM=0.013 m)对式(7)和式(8)进行验证。计算结果与试验结果相比,最大误差仅为2.3%。旋回试验数据验证结果见表6。故误差较小,回归公式符合度较高。

表6 旋回试验数据验证结果
由表6所知:计算结果仍存在一定的误差。分析其主要原因有:试验是在水池中进行的,未考虑风浪等外界干扰条件;未考虑旋回中影响旋回圈的其他因素,如旋回初始横倾角等;仅针对7个不同hGM场景进行试验,试验数据量有限。
4 结束语
本文利用所搭建的自航模试验平台,分析GM摄动与旋回性能的关系,其结果可应用于实际商船营运中,有助于船舶操纵与避碰安全,也可应用于智能商船操纵与控制中。所得回归公式适用于类似KVLCC1的船型,且需满足满载、平吃水、初始速度为1.5 kn的条件。后续研究可通过开展更多组hGM摄动的旋回试验(包括右旋回试验、不同初始速度试验等),建立某型船舶速度与旋回性能关系数据库,以便于该方法的推广应用。
猜你喜欢
船舶(2022年4期)2022-08-20
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
船舶(2021年4期)2021-09-07
船舶(2020年4期)2020-08-29
中国船检(2020年1期)2020-03-01
水上消防(2019年3期)2019-08-20
船舶标准化工程师(2019年4期)2019-07-24
儿童故事画报·自然探秘(2017年3期)2017-06-29
语文世界(小学版)(2014年3期)2014-08-02