具有弹性扭转悬架的非公路车辆平顺性及侧倾稳定性分析
2019-02-22 02:27:40SubhashRakheja上官文斌
振动与冲击 2019年4期
柴 牧, Subhash Rakheja, 上官文斌
(华南理工大学 机械与汽车工程学院,广州 510641)
轮式非公路车辆广泛用于林业、农业及矿业等领域,如装载机、林业集材机等,这类车辆通常没有悬架,且长期行驶在粗糙不平的非铺装路面上。大量试验表明[1-3],由路面激励传递到驾驶员的全身振动(Whole-Body Vibration,WBV)往往都超过了ISO-2631-1所规定的人体可承受振动的安全界限[4],这将严重影响驾驶员的身心健康。此外,由于车辆质心高,轮胎弹性变形大,且载荷变化范围大,导致车辆发生侧翻的风险较大,而传统的悬架将会增大这种风险。刚度较小的悬架可以提高车辆的平顺性,但会降低车辆的稳定性,反之,大刚度的悬架可以提高车辆稳定性,但平顺性会变差[5]。因此,对非公路车辆的悬架进行设计,使其平顺性和稳定性同时得到改善为当前研究的难点及热点。
目前对非公路车辆悬架的研究大多以改善平顺性或稳定性之一为研究目标,同时考虑满足二者的研究较少。Rehnberg等[6]通过建立装载机模型,分析了悬架系统对改善车辆平顺性的作用,与无悬架车辆相比,具有前后悬架车辆可以有效降低车身垂向和纵向的振动,但横向振动降低很小。Cao等[7]对互连式油气悬架进行了研究,这种悬架可在改善车辆平顺性的同时提高了车辆的侧偏刚度,使车辆侧翻稳定性得到增强,但这种油气悬架结构复杂,管路众多,安装布置困难且可靠性不能保证。国内外对非公路车辆主动及半主动悬架的研究也较多,但可靠性及成本等因素限制了其应用[8-10]。Crolla[11]研究了四种不同悬架布置模式下的农业拖拉机的平顺性(即无悬架、仅有前悬架、仅有后悬架及具有前后悬架),研究表明具有前后悬架可最有效的提高车辆的平顺性,且驾驶室座椅越靠近悬架轴,其乘坐舒适性越好。Pazooki等[12]研究了一种新型的弹性扭转悬架系统,并将其应用于某非公路车辆的后悬架。通过与无悬架车辆相比,具有后悬架车辆座椅处沿垂向及侧倾方向的振动得到减小,证明了弹性扭转悬架对改善非公路车辆平顺性及稳定性有明显的效果,但由于座椅在车辆前部,仅有后悬架对车辆乘坐舒适性的改善效果有限。
本文在Pazooki等研究的基础上,建立不同弹性扭转悬架布置方式的三维整车模型,包括仅有前悬架、仅有后悬架及具有前后悬架车辆模型。研究了四轮越野路面模型,且考虑了左右轮路面的相关性。车辆模型采用了非线性三维点接触轮胎模型,考虑了轮胎跳动时与路面失去接触的情况。通过对比分析座椅处沿纵向、横向、垂向、侧倾及俯仰方向加速度功率谱密度(Power Spectral Density, PSD)及非加权与频率加权加速度均方根值,研究了不同弹性扭转悬架布置方式下车辆的振动响应。并对车辆模型在不平路面及单侧车轮冲击激励下的车身侧倾角响应进行了分析。最后讨论了载荷变化对车辆振动响应的影响,同时分析了悬架参数变化对悬架减振效果的影响。利用所建立的整车模型,对非公路车辆悬架的选择方式具有一定的指导意义。
1 弹性扭转悬架及整车模型
1.1 弹性扭转悬架模型
弹性扭转悬架结构,如图1(a)所示。弹性扭转悬架由一根连杆及两根弹性扭杆组成,连杆为长方体刚性杆,弹性扭转为表面覆盖橡胶的金属杆,连杆通过弹性扭转一端与车身相连,另一端与车轴相连,每一扭杆通过连接叉分别固定于车身与连杆或车轴与连杆间。当连杆与车身或车轴绕x轴发生转动时,由于扭杆在扭转方向的弹性形变可以提供一定的扭转力矩,从而抑制了车身发生侧倾的趋势。由于扭杆的半径较小,使其在径向的变形较小,可减小簧载质量与非簧载质量间的相对位移。连杆的长度及扭杆的直径可根据车辆的额定载重量确定。可将弹性扭转悬架弹性扭转简化成垂向及横向的线性弹簧阻尼系统和绕x轴方向的扭转弹簧阻尼系统,如图1(b)所示。
与传统悬架相比,弹性扭转悬架有以下几个优点:①簧载质量与非簧载质量之间垂向的相对位移较小,提高了车身的稳定性;②悬架的侧倾刚度高,可增强车身的抗侧翻能力;③由于悬架弹性元件的变形小,则车辆对载荷的变化不敏感;④悬架坚固耐用、维护方便。
1.2 整车建模
前后轴装备弹性扭转悬架的三维整车模型,如图2(a)与图2(b)所示。坐标系(x,y,z,φ,θ)分别表示纵向、横向、垂向、侧倾和俯仰方向。车辆簧载质量简化为集中质量ms,共有5个自由度(xs,ys,zs,φs,θs);前、后非簧载质量可简化为集中质量muf和mur,分别有3个自由度(yuj,zuj,φuj;j=f,r);每个悬架连杆简化为集中质量mi(i=1,..,4),分别有3个自由度(yi,zi,φi;i=1,..,4)。弹性扭转悬架弹性扭转可简化成沿横向(Ky,Cy)、垂向(Kz,Cz)及扭转方向(Kt,Ct)的线性弹簧及阻尼系统,如图2(c)所示。车辆的运动方程可由下式表示
(1)
式中:[M]为(23×23)质量矩阵,包括簧载质量及其转动惯量,前(f)、后(r)非簧载质量及其转动惯量和悬架连杆质量及转动惯量,即
[M]=diag[Mc,ms,ms,Ix,Iy;muj,muj,Iuj(j=f,r);
mi,mi,Ii(i=1, ...,4)]
(2)
[Fs]为由悬架变形产生的力及力矩;[FT]为地面与轮胎相互作用产生的力;{X}为(23×1)的多维向量
{X}={xs,ys,zs,φs,θs;yuj,zuj,φuj(j=f,r);
yi,zi,φi(i=1,..,4)}T
(3)
对整车模型而言,若将前悬架刚度设为无限大,则可将车辆模型视为仅有后悬架车辆模型,同理,若后悬架刚度无限大,模型可视为仅有前悬架车辆模型。式(1)中各矩阵所包含参数的意义和数值,及悬架力和轮胎力[Fs],[FT]的表达式见附录。
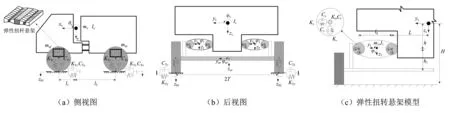
图2 整车模型Fig.2 Fully-suspended vehicle model
轮胎模型采用非线性三维点接触模型[13],如图3所示,将轮胎简化为沿纵向、横向及垂向的刚度(KTx,KTy,KTz)及阻尼(CTx,CTy,CTz)系统。本文在计算轮胎垂向力时,考虑了轮胎垂向跳动时可能与地面失去接触的情况,此时轮胎力为0。

图3 三维点接触轮胎模型Fig.3 Three-dimensional point contact tire model
越野路面模型可简化成不可变形路面模型,路面不平度功率谱密度Gq由式(4)表示
Gq(n)=α·n-β, (α>0,β>0)
(4)
式中:α为路面不平度系数;β为频率指数;n为空间频率,本文以林地作为路面输入(α=1.0×10-4,β=1.76)。白噪声l(t)激励下的路面时域模型可由以下三阶微分方程表示
(5)
式中:z0为路面不平度时域信号;系数ai及bi(i=0,1,2)可由文献[14]中的方法计算得到:a0=7.84,a1=0.22,a2=13.20,b0=7.29,b1=0.02,b2=12.61。
对越野路面而言,左、右车轮路面输入相关性具有低频下相关度高而高频下相关度低的特点,可用如下分段函数描述其相关性
(6)
式中:fc为截止频率,本研究中取fc=1.5 Hz。若已知左前轮路面输入z01,可根据参考文献[15]所述方法计算得到右前轮路面输入z02。
若已知左前轮路面输入z01,则左后轮路面输入z03为前轮输入下的时间延迟:z03(t)=z01(t-τ),τ=L/v,L为车辆轴距,v为车速。采用二阶pada逼近法,确定前、后轮路面输入关系,得到后轮路面输入,最终得到四轮路面输入{z01,z02,z03,z04}。
1.3 车辆平顺性及稳定性评价方法
通过车辆座椅处各方向的加速度PSD及非加权和频率加权加速度均方根值进行平顺性及稳定性评价,采用Welch法计算加速度PSD。座椅位置的加速度可由簧载质量质心处的加速度求得
(7)
式中:ls,bs和hs分别为质心距离座椅的纵向和横向距离及座垫距质心的垂向距离。
频率加权加速度均方根值可根据ISO-2631-1中定义的加权函数求出,加权函数wd,wk,we分别用来计算垂向、纵向和横向、侧倾和俯仰加权加速度均方根值。总的加速度均方根值av及8 h等效加速度均方根值A(8)用来评价人体所承受到振动强度
(8)
式中:awx,awy,awz分别为纵向、横向及垂向加权加速度均方根值。权重系数kx=ky=1.4,kz=1。T0=8 h为每日参考工作时间,Te=4 h为日均工作时间。
非公路车辆侧倾稳定性主要由车辆在行驶过程中车身质心处的侧倾角大小评价。文中分析了不同悬架布置方式下的车辆模型在不平路面的车身侧倾角,并对比了仅有后悬架车辆在右侧车轮冲击激励下车身和后轴侧倾角大小。
2 应用实例分析
2.1 模型验证
以后轴装有弹性扭转悬架的某非公路车辆为试验对象,车辆在满载情况下(有效载荷为3 000 kg)以5 km/h在林地匀速直线行驶5 min,采集座椅处纵向、横向、垂向、侧倾及俯仰加速度值,具体试验方法及步骤参考Pazooki等的研究。座椅处各方向加速度PSD试验值与仿真结果的对比,如图4所示。从图4可知,仿真结果与试验值吻合较好,仿真与试验测得的各方向固有频率接近。但由于采用了点接触轮胎模型,在激励频率较高时会增大车身的振动,因此当频率大于4 Hz时,沿纵向和垂向的加速度PSD高于试验值。
座椅处各方向非加权及频率加权加速度均方根值,av及A(8)仿真结果与试验值见表1。从对比结果可以看出,试验值与仿真值的误差较小,非加权加速度均方根值试验与仿真的误差从沿φ方向的6.3% 到沿z方向的13%;而加权加速度均方根值试验与仿真误差从沿θ方向的5.7%到沿y方向的10.5%,此误差可能是由于将车辆前、后车体看为一体而忽略了铰接处的影响,轮胎简化为点接触模型,且将悬架简化为线性刚度及阻尼等因素引起的。因此,简化后的弹性扭转悬架模型及整车模型可以较准确的描述弹性扭转悬架及非公路车辆动力学特性。
2.2 不同悬架布置方式下车辆动力学性能分析
由于Pazooki等只研究了后轴有弹性扭转悬架车辆的振动情况,而驾驶室在车辆前部,为了研究不同弹性扭转悬架布置方式下车辆的减振效果,在只有后悬架非公路车辆的基础上,分析了仅有前悬架,仅有后悬架和具有前后悬架车辆的振动响应。仿真条件为车辆在空载状态下以5 km/h在林地匀速直线行驶,不同悬架布置方式下车辆座椅处各方向加速度PSD曲线, 如图5所示。不同悬架布置方式下车辆的参数见附录。

表1 非加权及频率加权加速度均方根值,av及A(8)仿真结果与试验结果对比
从图5可知,具有前后悬架车辆座椅处各方向加速度PSD最低,尤其当频率超过5~7 Hz时,各方向振动加速度PSD远低于仅有前悬架和仅有后悬架车辆。从图5(c)和图5(d)可知,具有前后悬架车辆在z及φ方向的加速度PSD最大值低于其它两种悬架形式车辆,说明同时装备前后悬架对改善车辆平顺性及稳定性效果最佳,既提高了驾驶员的乘坐舒适性,又提高了车辆的侧倾稳定性。
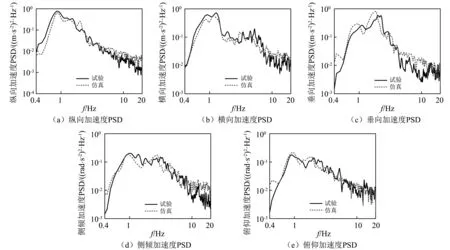
图4 座椅处加速度PSD实验与仿真结果对比Fig.4 Comparisons of acceleration PSD responses of the rear-suspended vehicle model with measured data
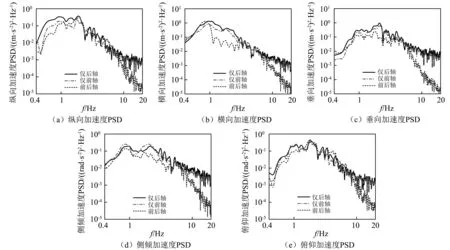
图5 座椅处加速度PSD试验与仿真结果对比Fig.5 Comparisons of acceleration PSD responses of the vehicle model with optimal front-, rear- and two-axle suspensions
仅有前悬架车辆在x,y,z方向的加速度PSD值小于仅有后悬架车辆相应值,但在φ方向,仅前悬架车辆在共振频率点附近加速度PSD值略高于仅后轴有悬架车辆,这可能是由于座椅在车辆前部,且空载下前轴载荷较大,导致悬架的变形大,在共振频率下使侧倾振动增大。从图中加速度PSD曲线还可以看出,由于纵向、垂向和俯仰方向的耦合关系,三个方向共振频率接近,仅有前悬架及仅有后悬架车辆加速度PSD在1 Hz与2.1 Hz附近出现峰值,具有前后悬架车辆峰值出现在1 Hz和1.8 Hz附近。而由于横向与侧倾的耦合关系,加速度PSD曲线在1 Hz及3.5 Hz附近出现峰值。
表2列出了不同悬架布置方式下车辆沿各方向加速度均方根值,av及A(8)。从表2可知,与无悬架车辆相比,仅有前悬架、仅有后悬架和具有前后悬架车辆都可以有效的降低座椅处的振动加速度,总加权加速度均方根值av分别减小了62%,97%及127%。具有前后悬架车辆在各方向的加速度均方根值最小,且在z及φ方向的非加权和加权加速度均方根值远低于仅有前悬架及仅有后悬架车辆加速度均方根值。仅有前悬架车辆振动加速度在除φ方向降低较少外,其余方向加速度均方根值均小于只有后悬架车辆加速度均方根值,说明前轴安装有弹性扭转悬架可更好的提高车辆的乘坐舒适性。
不同悬架布置方式下车辆车身侧倾角随时间的变化,如图6所示。从图6可知,具有前后悬架车辆车身侧倾角最小,对提高车辆侧倾稳定性效果最好。仅前轴及仅后轴有悬架车辆车身侧倾角之间的差别较小,而无悬架车辆车身侧倾角大幅高于有悬架车辆。因此扭杆悬架可使非公路车辆在粗糙路面保持较好的侧倾稳定性。

图6 不同悬架布置方式下车身侧倾角Fig.6 Comparisons of chassis angle of vehicle model with different suspension arrangements
为进一步验证扭杆悬架可使车辆在恶劣路面条件下提供良好的侧倾稳定性,以仅有后悬架车辆为例,假设右侧车轮在幅值为15 cm,频率为5 Hz的冲击激励下,如图7(a)所示。得到车身及后轴侧倾角随时间变化曲线,如图7(b)所示。从图7(b)可知,在5 s附近,车身侧倾角最大值(2.6°)远小于车轴侧倾角最大值(6°),说明扭杆悬架可在左右轮路面起伏较大时有效的减小车身的侧倾角,提高了车辆侧倾稳定性。此外,在3 s附近的车身侧倾角大于后轴侧倾角,这是由于前、后轮路面输入的延迟,前轮在3 s附近通过冲击激励,此时车身的侧倾角要大于后轴的侧倾角。
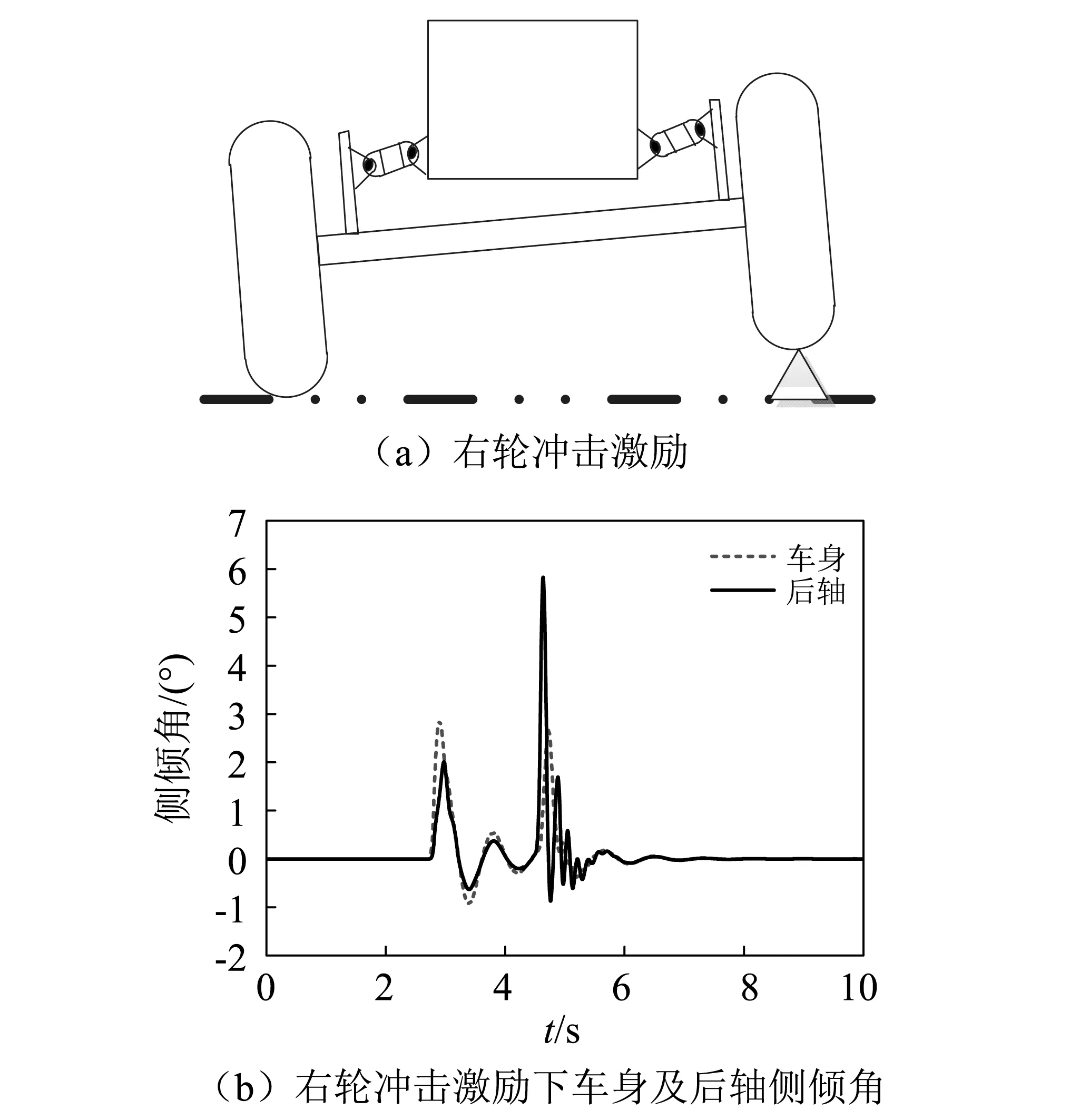
图7 右轮冲击激励下车身侧倾角响应Fig.7 The roll angle response of vehicle chassis under the right tire bump input

方向非加权加速度均方根值/ (m·s-2)无悬架仅后轴仅前轴前后轴加权加速度均方根值/(m·s-2)无悬架仅后轴仅前轴前后轴纵向1.450.810.640.621.360.700.530.53横向1.721.180.930.771.451.010.830.71垂向1.991.141.030.631.180.700.660.47侧倾0.980.830.790.470.690.410.400.28俯仰0.680.850.740.680.470.420.390.34av3.021.861.531.33A(8)2.141.321.080.94
2.3 载荷变化对车辆振动响应的影响
由于非公路车辆载荷变化范围大,载荷变化对车辆行驶中的平顺性及稳定性影响较大。本节讨论了不同悬架布置方式下车辆在空载及满载情况下的振动响应。表3~表6分别列出了无悬架,仅有后悬架、仅有前悬架和具有前后悬架车辆在空载和满载下各方向加速度均方根值。
从表3可知,无悬架车辆对载荷变化很敏感,满载状态下除x方向外非加权和加权加速度均方根值均大于空载状态下的加速度均方根值,z和θ方向加速度均方根值增大约30%~60%,而φ方向非加权与加权加速度均方根值增幅达117%~130%,车辆的舒适性及侧翻稳定性在满载下大幅降低。
由于载荷在车辆后部,仅有后悬架车辆在满载下各方向非加权加速度均方根值都有所降低,但满载下φ和θ方向的加权加速度均方根值比空载下增加约17%,这是由于满载下φ和θ方向加速度固有频率降低且此频率点附近的频率加权系数we值最大。
仅有前悬架车辆在空载和满载时各方向振动加速度变化不大,载荷对舒适性和稳定性影响小。而具有前后悬架车辆在满载下沿x,z和θ方向加速度值均方根值有所增大,但变化不大,且仍低于仅有前悬架与仅有后悬架车辆加速度值。且具有前后悬架车辆满载时沿φ方向加速度值小于空载时加速度值,则满载下不会影响车辆侧翻稳定性。
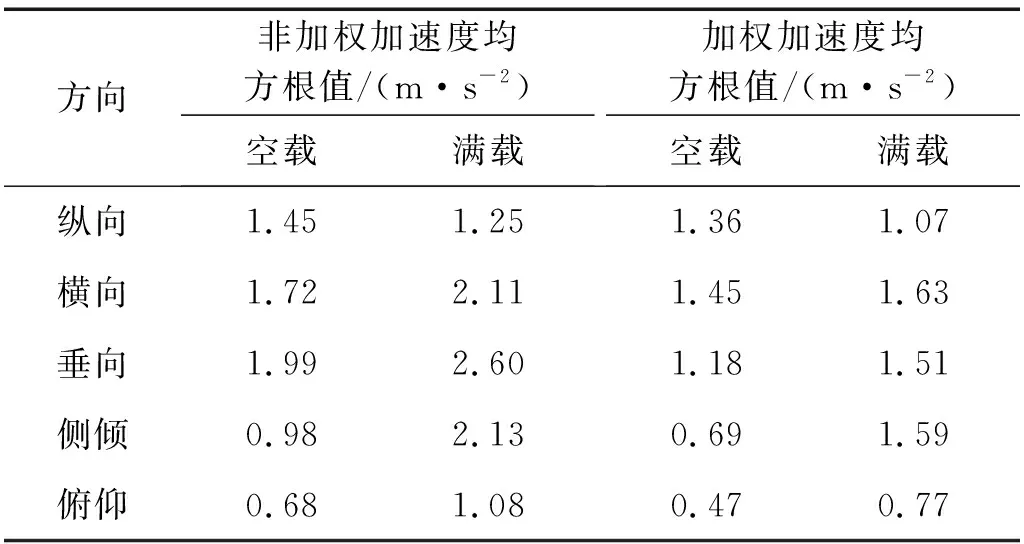
表3 无悬架车辆空载与满载下加速度均方根值
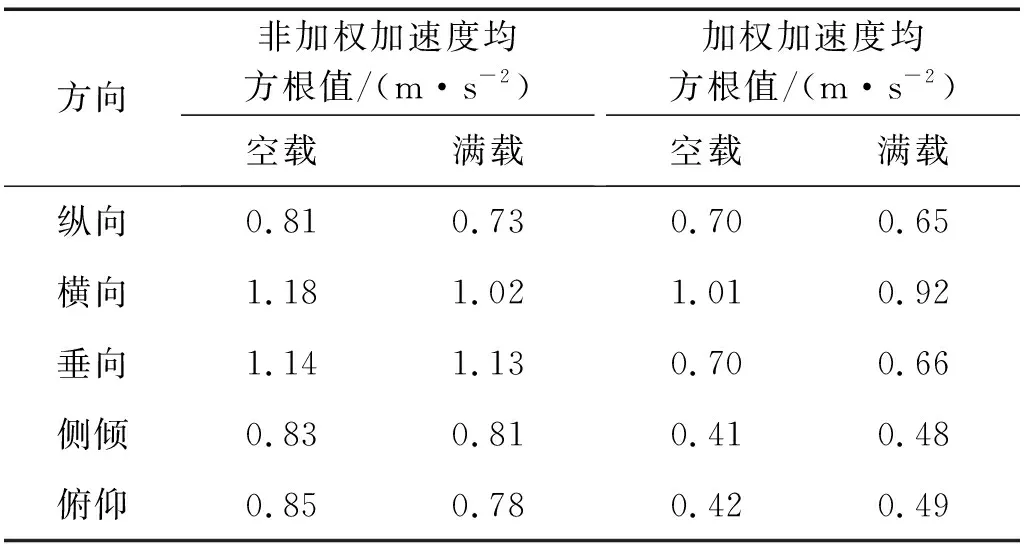
表4 仅有后悬架车辆空载与满载下加速度均方根值
2.4 悬架参数对车辆振动响应的影响
扭杆悬架参数对车辆振动响应有重要影响,以仅后轴有悬架车辆为例,扭杆悬架刚度和连杆宽度对驾驶员座椅处频率加权振动加速度响应的影响,如表7所示。由于悬架弹性扭转的阻尼较小,在此不讨论阻尼对车辆振动响应的影响。
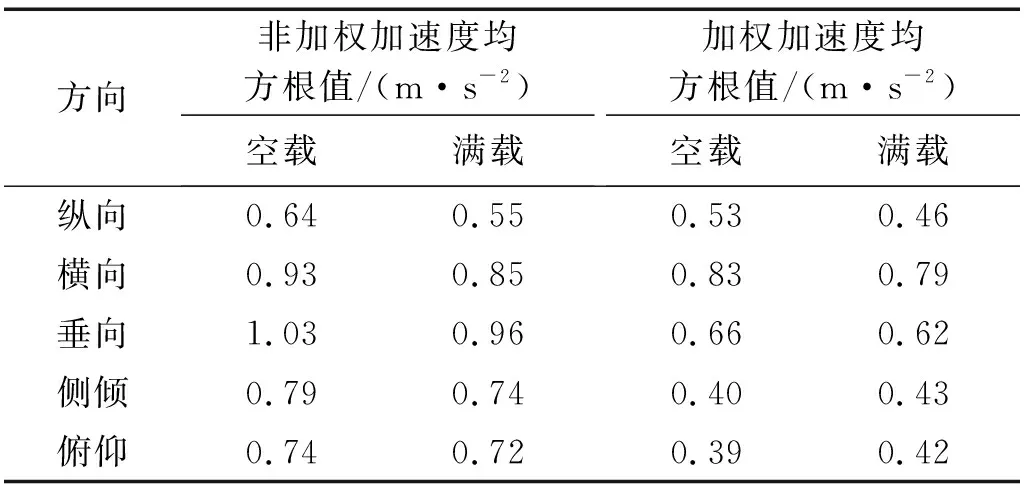
表5 仅有前悬架车辆空载与满载下加速度均方根值
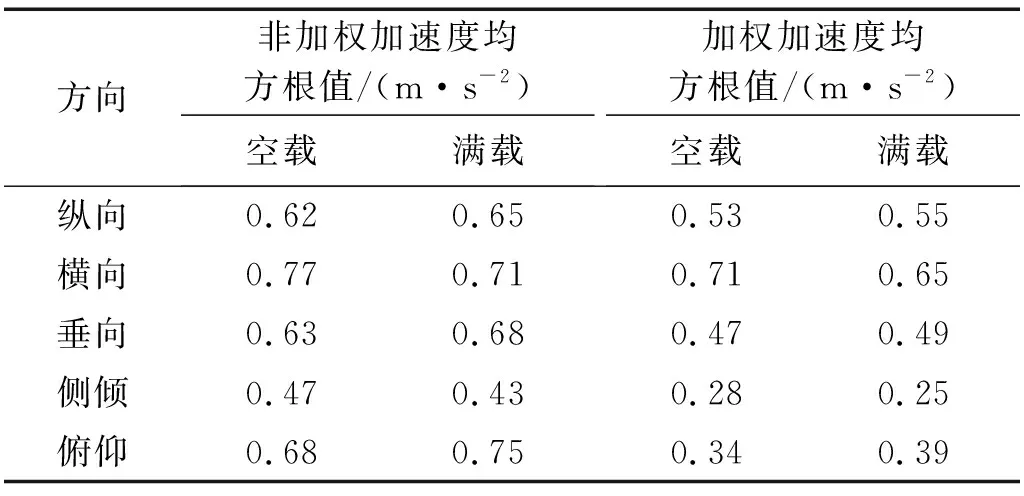
表6 有前后悬架车辆空载与满载下加速度均方根值
从表7可知,悬架垂向刚度减小,纵向及垂向振动加速度也相应减小。而横向及侧倾振动加速度随悬架横向刚度的降低而减小。扭转刚度的增加也会降低车辆侧倾振动。悬架连杆宽度对车辆横向及侧倾振动有重要影响,连杆越宽,侧倾振动加速度越小,但俯仰振动有所增加。弹性扭转悬架可通过改变连杆及扭杆的长度改变其各方向刚度,因此可根据不同车辆的载荷要求及行驶路面条件对悬架进行选型,即通过改变连杆及弹性扭转在纵向的长度及连杆的宽度来匹配不同类型车辆。
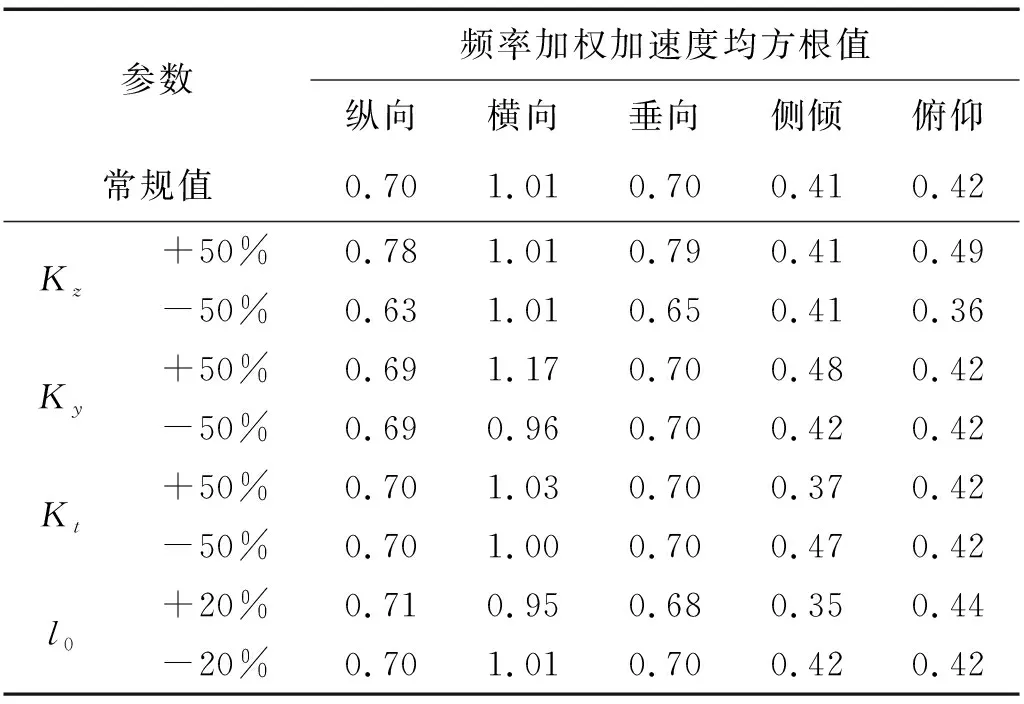
表7 悬架参数变化对驾驶员座椅处振动的影响
3 结 论
(1)建立了不同弹性扭转悬架布置方式(仅有前悬架、仅有后悬架及具有前后悬架)的三维整车模型,包括四轮越野路面模型及非线性三维点接触轮胎模型。通过后轴装有弹性扭转悬架的车辆试验验证了模型的准确性。
(2)对比分析了三种具有弹性扭转悬架车辆模型与无悬架车辆模型的振动响应。结果表明,具有前后悬架车辆各方向振动加速度最小,av减小了127%,特别是沿垂向及侧倾方向的加速度显著降低,说明具有前后悬架车辆对提高车辆平顺性及稳定性效果最佳。且仅前轴装有弹性扭转悬架比仅后轴有弹性扭转悬架车辆具有更好的乘坐舒适性。
(3)通过分析不同悬架布置方式下车辆模型在不平路面激励,及仅后轴有悬架车辆在右侧车轮冲击激励下的车身侧倾角响应可知,扭杆悬架可有效减小车辆的侧倾角,提高了非公路车辆在不平路面行驶下的侧倾稳定性。
(4)讨论了载荷变化对不同悬架形式车辆的影响,表明装备弹性扭转悬架车辆对载荷的变化不敏感,满载下对车辆的乘坐舒适性和稳定性影响不大,加速度均方根值变化范围在18%之内。并分析了悬架刚度及悬架连杆宽度对车辆振动响应的影响,为不同类型车辆悬架的选型提供了参考依据。
与Pazooki等只对后轴装备悬架的非公路车辆平顺性的研究相比,作者讨论了三种悬架选择方式下车辆的平顺性及侧倾稳定性。由于非公路车辆载荷变化大且行驶环境复杂多变,悬架的选择较为困难,文中的结论为选择非公路车辆悬架提供了指导意义。
猜你喜欢
汽车实用技术(2022年12期)2022-07-05 11:11:14
机械设计与制造(2022年5期)2022-05-19 03:33:54
汽车零部件(2019年10期)2019-11-13 05:59:56
科技信息·下旬刊(2018年9期)2018-10-21 13:36:26
北京汽车(2016年6期)2017-01-06 05:32:28
北京汽车(2016年6期)2016-10-13 17:07:50
汽车实用技术(2015年8期)2015-12-26 09:01:00
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
汽车维护与修理(2014年10期)2014-02-28 12:15:00
机械与电子(2014年2期)2014-02-28 02:07:44