带刚臂和弹性段的平面组合索单元
2019-02-19 01:29,,,
郑州大学学报(理学版) 2019年1期
, , ,
(郑州大学 水利与环境学院 河南 郑州 450001)
0 引言
在斜拉桥的有限元模型中,拉索的模拟是决定分析精度的重要因素.对于成桥阶段,可以采用桁架单元,用直杆模拟拉索.为增加分析的准确性,可采用Ernst公式修正杆的弹性模量.对大跨度斜拉桥中大垂度的长索及施工过程中的拉索,必须考虑索的曲线特性.为精确模拟曲线形索,文献[1]建立了多节点的曲线单元,文献[2]采用三次多项式插值建立了两节点的曲线单元,文献[3]采用拉格朗日插值构造了两节点的曲线索单元,文献[4]建立了五节点的曲线索单元.文献[5-7]利用弹性悬链线的解析解建立了弹性悬链线单元,并建议了计算时的初值.目前,弹性悬链线单元已被广泛应用于拉索模拟,并被引入部分结构有限元分析软件(如Midas/Civil).文献[8]在该单元的基础上建立了分析索结构中滑动索的滑移索单元.文献[9]对单索问题进行了分类,算例结果表明,修正弹性模量的方法只能用于水平长度不超过400 m的斜拉索,否则将引起较大的误差.文献[10-11]建立了带刚臂的索单元,假定两端刚臂总与索端部相切,在应用于斜拉桥模拟时,限制了塔上节点的划分,也不便与主梁连接.文献[12-13]也建立了带刚臂的索单元,刚臂与索端部铰接,且文献[13]指出文献[12]在对刚臂端部力矢量微分时,忽略了对角度变量的微分.本文在弹性悬链线解析解的基础上建立了两端有弹性段的索单元,进而在索单元两端增加刚臂,推导和构造了该组合索单元.
1 弹性悬链线单元

图1 弹性悬链线单元Fig.1 Element of elastic catenary
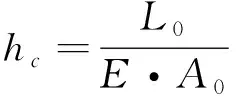
一个弹性悬链线单元如图1所示,其水平投影长度为lc,竖直投影长度为hc.索的弹性模量为E,横截面面积为A0,单位长度重量为q0,该索段的无应力长度为L0.据弹性悬链线理论[6-7],索的投影方程为
(1)
(2)
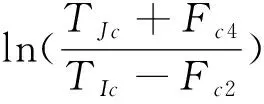
式中:TIc和TJc分别为索段左端和右端节点处的索力.
根据单元受力平衡条件,可得Fc3=-Fc1,Fc4=q0·L0-Fc2.
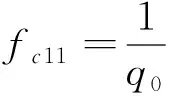
式(1)和式(2)分别对Fc1、Fc2求偏导,可得索段在I端的柔度矩阵为
(3)
左端点力的增大会使水平投影和竖直投影减小.因此,柔度矩阵fc中各元素取计算值的负值.进而,可得到弹性悬链线单元的刚度矩阵为
(4)
式中:kc为柔度矩阵fc的逆矩阵.
2 带弹性段的索单元
索体两端的钢套筒与其内部的钢丝通过高强黏结材料固结为整体,且钢套筒的横截面面积与其内部所有钢丝的横截面面积相当.因此,套筒段宜单独考虑,可近似为一个弹性段,其方向沿索段端部索力方向,也就是索段端部的切线方向.带弹性段的索单元如图2(a)所示,其水平投影长度为le,竖直投影长度为he,Wi和Wj分别为索体端部超出锚垫板的锚杯部分和螺母的重量,sei、qei和sej、qej分别为两个弹性段的原长及单位长度重量,弹性段受到的重力平移到相应的端部节点.
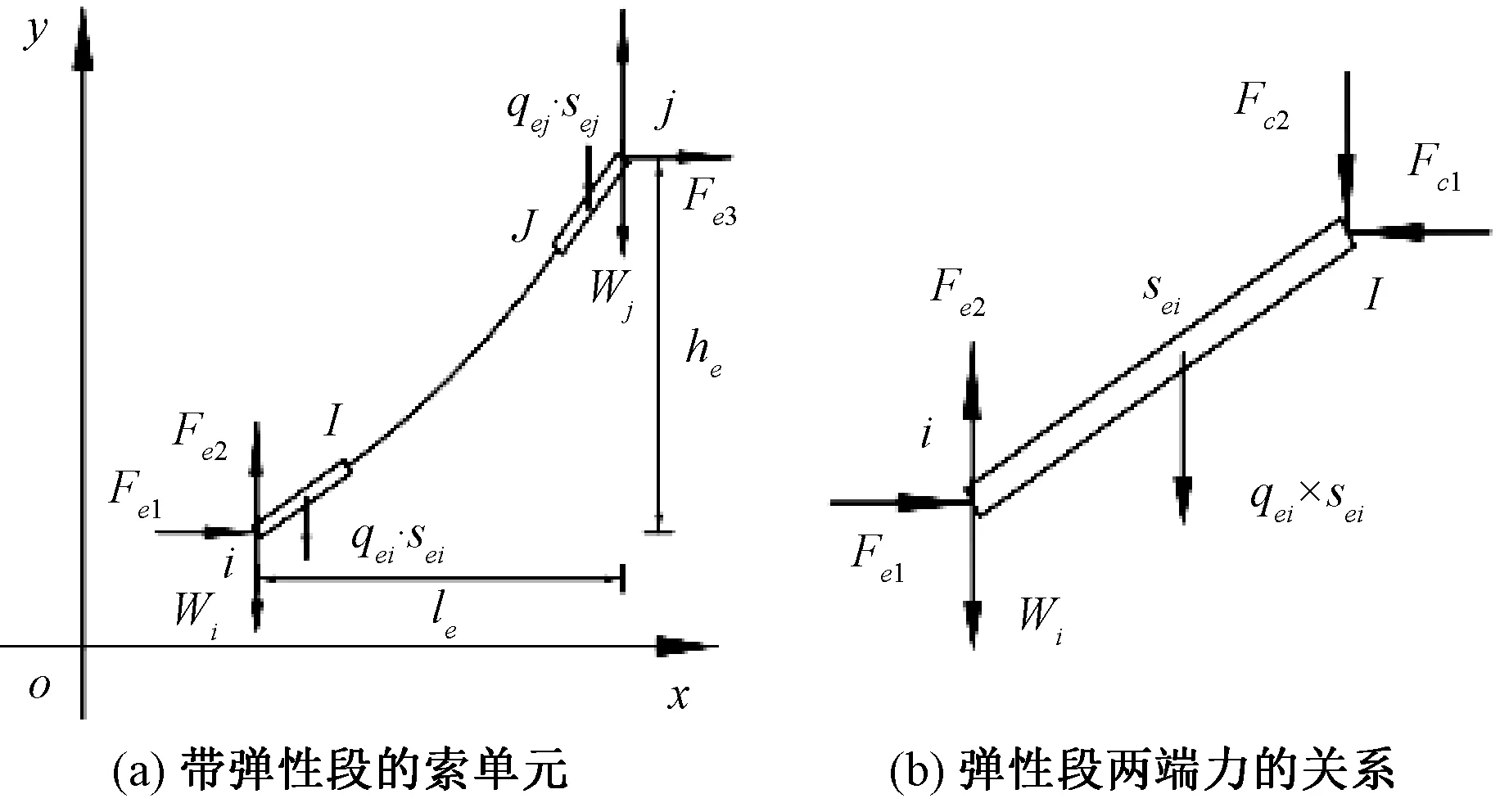
图2 带弹性段的索单元和弹性段两端力的关系Fig.2 Cable element with elastic segments and forces on the both sides
弹性段两端力的关系如由图2(b)所示,带弹性段的索单元的节点力为
(5)
两端带弹性段索体的投影方程为

(6)

(7)
式中:Eei和Aei分别为i端弹性段的弹性模量和横截面面积;Eej和Aej分别为j端弹性段的弹性模量和横截面面积.
式(6)和式(7)分别对Fc1、Fc2求偏导,可得带弹性段的索单元在左端点的柔度矩阵为
(8)

带弹性段的索单元在左端点的刚度矩阵为
(9)
由刚度矩阵的对称性可知,两端带弹性段的索单元的刚度矩阵可以表示为
(10)
根据刚度矩阵的定义,可得

(11)
3 两端带刚臂和弹性段的组合索单元
在带弹性段的索单元两端增加刚臂,得到如图3(a)所示的组合索单元.αi和αj分别为两端刚臂的倾角,刚臂的长度分别为si和sj.左端刚臂的受力如图3(b)所示,其两端点之间的坐标关系[13]为
xi=xa+si·cosαi,
(12)
yi=ya+si·sinαi.
(13)

图3 带刚臂和弹性段的组合索单元Fig.3 The combined cable element with rigid arms and elastic segments
对式(12)和式(13)两端微分,可得左端刚臂两端点之间的位移关系为
(14)
同理,可得右端刚臂两端点之间的位移关系为

(15)
联立式(14)和式(15),并记

(16)
可得

(17)
根据刚臂两端力的关系,组合索单元的节点力可以表示为
(18)
对式(18)两端微分,可得
(19)
其中Tα除了两个元素Tα3,3=-si·cosαi·Fe1-si·sinαi·Fe2,Tα6,6=sj·cosαj·Fe3+sj·sinαj·Fe4外,其余元素均为零.
联立式(11)、式(17)、式(19),可得组合索单元的刚度矩阵为
(20)

图4 下端位于不同位置的单根索Fig.4 Single cable with the lower end at different locations
4 算例验证
算例1下端位于不同位置的单根索如图4所示,该索的计算参数见文献[5]和[11],无应力长度L0=100 m,横截面面积A0=1 cm2,弹性模量E=3×107Pa,单位长度重量q0=1 N/m,线膨胀系数为6.5×10-6.采用2个等原长的弹性悬链线单元模拟该索,共有3个节点.
由图4可以看出,不考虑弹性段的计算结果,与文献[5]对比,除最大张力工况有一定误差外,其他结果相同.最大张力工况的计算结果与文献[11]的结果相同,从而证明了本文弹性悬链线单元部分推导的正确性.
考虑弹性段时,具体可分为以下两种情况:一种是弹性段的参数不变化;另一种是弹性段的面积增加1倍,单位长度索重增加1倍.算例1中弹性段在不同取值情况下的计算结果见表1.结果表明,第1种情况下的结果与不考虑弹性段的误差很小.第2种情况在索力较小的几个工况下,只是竖向索力稍有增加,但绝对量很小;对于张力最大的工况,水平索力和竖向索力都有较大增加,这与实际情况相符,表明在索力很大时,不考虑弹性段会带来较大的误差.
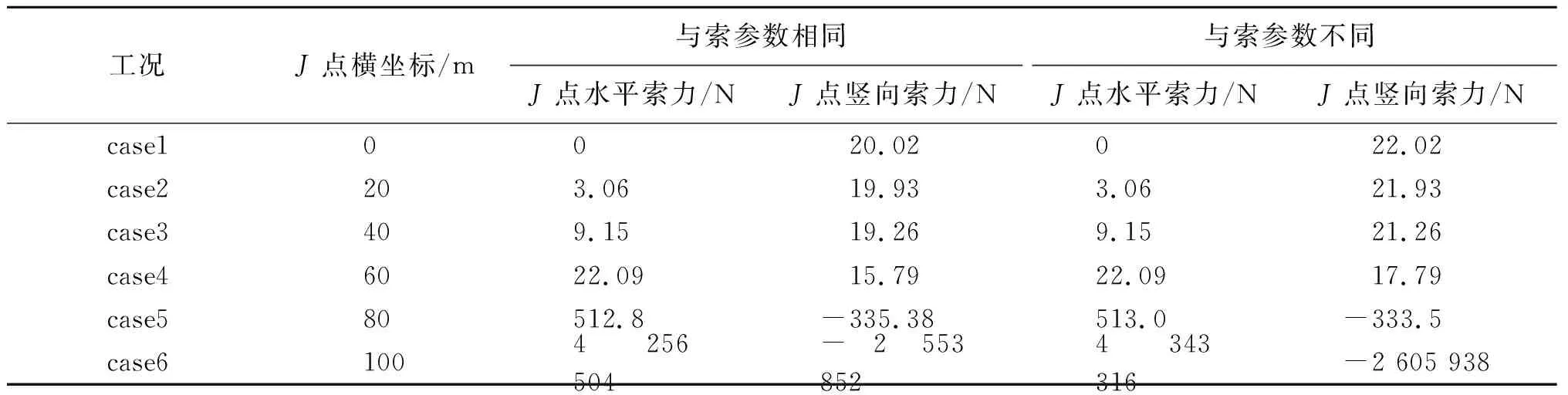
表1 算例1中弹性段在不同取值情况下的计算结果
算例2索段的弹性模量E=2×1011Pa,截面面积A0=10-5m2,单位长度重量q0=10 N/m,无应力长度L0=3.604 842 m.左、右两端刚臂长均为0.8 m,左端刚臂倾角αi=30°,右端刚臂倾角αj=60°.两端的弹性段长度均为0.600 925 m,与索段的弹性模量相等,截面面积为10-6m2,各弹性段重量均为50 N,弹性段外端各附加50 N的点荷载.弹性段截面面积取索的十分之一,以便于弹性段有较大的变形.

图5 算例2中组合单元在变形后的形状图Fig.5 The profile after displacement of the combined element in example 2
单元的左端点位于原点,右端点位于(5.095 698 3,3.761 006 7) m.算例2中组合单元在变形后的形状图见图5,组合索单元的节点力为(-500.045,-215.439,50.757,500.045,451.488,165.847) N.
平衡状态下,可推算出去除两端刚臂后,带弹性段索单元的节点力为(-500.045,-215.439, 500.045,451.488) N,它们对左刚臂左端产生的力矩为-50.757 N·m,与单元在左刚臂处的第3个节点力分量平衡,右端也如此.推算索段两端的节点力为(-500.045,-315.439, 500.045,351.488) N,索段两端的水平投影长度为3 m,竖直投影长度为2 m,由式(1)和(2)可知,索段处于平衡状态.因此,组合索单元的单元节点力计算正确.通过依次使组合索单元的各自由度有一微小的位移增量,计算得到单元节点力的增量,可按定义法得到单元的刚度矩阵.经检验,组合索单元输出的刚度矩阵与按定义法得到的刚度矩阵相同.因此,根据推导所计算的刚度矩阵是完全正确的.
5 结论
基于弹性悬链线的解析解,首先建立了悬链线单元,进而在两端增加弹性段,推导了带弹性段的索单元的相关公式;又在带弹性段的索单元两端增加刚臂,构成了组合索单元,算例证明了所推导公式及编程的正确性.本文的组合索单元是多功能的.在两端刚臂长度取零值的情况下,可退化为只有单侧刚臂或不带刚臂的带弹性段索单元;在弹性段长度取零值的情况下,可退化为带刚臂而不带弹性段的单元;当不考虑刚臂和弹性段后,组合索单元可进一步退化为弹性悬链线单元.在已知索端部某个张力或张力分量的情况下,可通过求解索段的水平投影与竖直投影方程得到索原长,进而建立该组合单元.因此,该组合索单元可用于模拟索的张拉过程.组合索单元可用于斜拉桥的设计与分析,能更精确地模拟拉索,也可以用于模拟拱桥中的吊杆和悬索桥中的吊索.
猜你喜欢
军事文摘(2022年8期)2022-05-25
军事文摘(2021年18期)2021-12-02
军事文摘·科学少年(2021年9期)2021-10-13
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
家庭影院技术(2020年2期)2020-03-25
模具制造(2019年4期)2019-06-24
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
电子技术与软件工程(2018年10期)2018-07-16
速读·中旬(2018年4期)2018-04-28