
潜基弹道导弹模拟打靶技术研究
2019-02-19 07:17陆铭华史文森
导弹与航天运载技术 2019年1期
肖 凡,陆铭华,史文森
(海军潜艇学院,青岛,266199)
0 引 言
潜基弹道导弹结构复杂、技术密集、价格昂贵。其射程覆盖范围大,难以开展大射程、多发试射,试验时都采用小样本、小射程飞行试验方案,甚至是特小子样试验方案。其立项论证、研制、试验、定型等各环节都需要大量的数据作为支撑,这使得基于大样本统计的经典试验数据分析与评估方法受到了极大的挑战。针对这个问题国内外学者进行了多年研究,先后提出了如Bayes方法、Bootstrap方法、综合贯序检验方法等多种基于小子样统计的分析与评估方法[1],有效降低了小子样数据统计分析与评估决策风险。但是采用小子样数据分析方法评估飞行试验数据还需要补充一些数据,比如小射程试验下误差数据折合到大射程下误差数据,还有一些先验信息也需要折合。数字仿真试验具有可靠、无破坏性、可多次重复使用、安全经济、缩短研制周期、不受气象条件和场地空域的限制等特点[2]。随着计算机技术的发展,数字仿真飞行试验成为导弹小子样飞行试验的有益补充手段。
模拟打靶是误差折合等数据获取的有效手段,也是数字仿真飞行试验的关键环节,对于促进弹道导弹武器装备的发展作用显著。其本质是给定各种参数,采用仿真推演的方式模拟导弹飞行的全过程,近年来许多学者对此开展了相关研究,文献[3]对仿真模型校验方法进行了研究;文献[4]建立了导弹六自由度数学模型,采用Matlab/Rtw快速仿真方进行了蒙特卡洛打靶;文献[5]应用蒙特卡罗法设计了一种基于制导工具误差的模拟打靶试验统计方法。
潜基弹道导弹处于动基座环境,对准、发射等技术复杂,误差源多,这使得模拟打靶技术应用更为复杂,目前这方面的研究国内还处于初始阶段,相关成果鲜有报道。本文从潜基弹道导弹模拟打靶技术应用的全过程进行研究和阐述,以期为不同型号潜基弹道导弹模拟打靶提供技术参考。
1 基本流程
潜基弹道导弹模拟打靶分为4步:建模→构建模拟打靶系统→打靶→数据分析。建模主要包括导弹六自由度弹道仿真建模、误差源建模等;构建模拟打靶系统的主要工作是弹道飞行仿真以及误差模拟,根据用户模拟打靶目的的不同一般还设置数据一致性检验、Bayes精度估计、射程估计等功能;打靶是用户通过模拟打靶系统进行仿真推演,得到用户需要的飞行数据;数据分析是用户对模拟打靶结果的使用,是一次或者多次模拟打靶数据的综合分析。下面对模拟打靶的全过程进行分析和阐述。
2 打靶建模
如前所述,模拟打靶建模主要包括导弹六自由度仿真建模和误差源建模等。
2.1 导弹六自由度仿真建模
潜基弹道导弹一般采用水下弹射、出水点火的冷发射方式[6],飞行过程可以分为两大段:起始段OF与常规段FC(点火后飞行段),如图1所示。

图1 分段示意Fig.1 Diagram of Section
2.1.1 起始段建模
潜射导弹水下发射时,固、液、气多相并存,而且受海况影响明显,难以建立准确的解析模型。
文献[7]利用试验出水后数据,通过神经网络建模和算法训练的方式提出初始段弹道终点参数预测方法,但该方法工程应用时较为复杂。本文从工程实施的角度采取一种简化方法[10],基本思路如下:
统计相关海态试验导弹出水后的运动姿态数据,得到发动机点火时刻导弹的相关状态参数ix的样本均值iu与方差
iε,其中下标1221,,,…=i为,依次代表选定坐标系3个坐标方向下的位置、速度、姿态角和角速度。根据数据的随机性特征,可设状态参数xi为服从正态分布的随机数据,即:

以式(1)进行抽样,可得到模拟打靶所需起始段终点的弹道数据。
2.1.2 常规弹道建模
在发射惯性坐标系下进行运动建模分析,导弹质心动力学方程如下:

转动方程如下:

式中 I为转动惯量;ωT为转动速度;分别为气动、控制、阻尼、附加相对和附加哥氏力矩。
由于不同型号控制方式存在差异,因此式(2)、(3)中的受力项、力矩项的具体计算过程需进一步细化。
2.2 误差源建模
受潜射环境影响,潜基弹道导弹落点误差形成因素众多,众多因素中初始误差和平台工具误差最为显著,本文重点对这二者进行研究,诸如风干扰、制导方法等相对小量误差项。
2.2.1 初始误差
潜射弹道导弹初始误差由定位定向与初速误差构成[9]。显然,倘若采用前述“起始段弹道建模”中的方法(式(1)抽样),由于该方法所得结果已经包含了对初始误差,因此无需单独建立初始误差模型,不影响模拟打靶结果。但是为了方便初始段的弹道仿真,本文在此给出初始误差建模的一种抽样方法。
首先,统计相关试验数据、建立出示误差统计模型[6,10],然后据此抽样产生初始误差数据。
与式(1)的分解方式类似,在相应坐标系下,将初始误差分解为9个元素,其正态分布抽样模型如下:

式中 Xi, Si分别为样本均值与方差。
2.2.2 工具误差
工具误差主要是由惯性平台漂移所致,某时刻平台i方向上漂移角计算如下[8]:

各系数含义见文献[8],这里不再赘述。
模拟打靶时可运用式(5)进行工具误差的实时修正。
3 系统设计方法
软件建模是模拟打靶系统构建的关键。需求分析、系统结构以及系统内部的逻辑关系描述是构建模拟打靶系统的核心工作。 面向对象的可视化建模语言(Unified Modeling Language,UML)是面向对象领域中的重要成果,UML建模提供了新的软件模型描述方法,有效提高了系统设计的效率[11]。
本文采用UML对模拟打靶系统进行模型设计,步骤如下:第1步是构建需求描述模型,第2步是构建结构模型,第3步是构建行为模型。
3.1 需求描述
描述系统需求可采用UML的用例模型[11]。
用户使用潜基弹道导弹模拟打靶系统的目的多样,概括起来有以下几种:
a)飞行试验复现,这主要是针对飞行试验获取的遥外测数据,复现导弹飞行过程,评估飞行细节。
b)飞行试验误差分离:飞行试验落点受众多误差因素影响,模拟打靶是分析各项误差影响的有效且可信的手段,能定量分离出各项误差对落点的影响。
c)模拟飞行推演:模拟飞行获取飞行数据,或者目标攻击推演。
d)精度分析补充子样:可供直接利用的飞行试验样本有限,精度分析需要进行子样补充,利用验前误差信息通过模拟打靶可得到精度分析补充子样。
e)射程评估补充子样:潜基弹道导弹射程远,而飞行试验数据一般都是小射程、小子样,射程评估时需要利用相关测定数据通过模拟打靶补充子样。
图2为系统需求描述的UML用例图。

图2 需求描述用例示意Fig.2 Case of Requirements Description
3.2 系统结构设计
系统结构可采用 UML中的类模型[11]进行描述。根据需求描述的用例图进行设计,基于设计的通用性和扩展性考虑的设计原则,潜基弹道导弹模拟打靶系统可由以下3类构成:弹道仿真类、功能类和数据管理类。
a)弹道仿真。
弹道仿真类是系统设计的核心,可设计为导弹、诸元、干扰、标准环境等子类。
导弹类描述导弹飞行仿真过程中所涉及的导航制导组件及过程,由状态变量、导航制导控制、执行机构、发动机组、平台和弹头等子类组成。诸元类由实时诸元和固定诸元等子类组成。干扰类由定位误差、定向误差、速度误差、高空风、扰动引力、气压偏差及大气密度偏差等子类组成。标准环境类实现标准弹道相关参数的描述及计算。
b)功能。
功能类主要提供实现该功能所需的相关参数调用接口,由飞行试验复现功能、飞行试验误差分离、模拟飞行推演、精度分析补充子样、射程评估补充子样功能类等子类组成。
c)数据管理。
数据管理类实现模拟打靶所有数据的读写及调度管理。
系统结构如图3所示。

图3 系统结构示意Fig.3 System Structure
3.3 行为过程
潜基弹道导弹模拟打靶全系统行为过程如下:响应用户需求,系统(功能实体)根据需求分析模拟飞行所需的数据目录,数据库(数据管理实体)根据数据目录提取相关数据与参数传输给模拟飞行模块(弹道仿真实体)进行模拟飞行,模拟飞行后输出仿真结果数据存储于数据库,数据库根据用户需求将与需求相关的数据筛选后发送给功能实体,功能实体经过分析计算展现给用户所关心的模拟飞行结果数据。
采用 UML顺序图描述潜基弹道导弹模拟打靶全系统行为过程如图4所示。
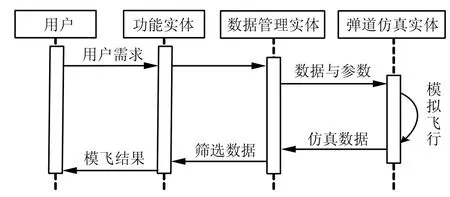
图4 全系统行为过程Fig.4 System-wide Sequence of Conduct
全系统行为过程是一个全局性的行为序列,除此之外,在系统构建时还有大量的行为过程(比如,弹道仿真类初始化对象时内部各子类间的调用和交互关系)需要描述,其方法与全系统行为过程的描述相同。
4 系统实例
潜基弹道导弹模拟打靶系统构建如图5所示。
系统采用交互式工作模式:交互计算机响用户需求,然后根据用户需求向数据服务器发出调用相关初始仿真数据指令;数据服务器将该数据下发给仿真计算机,仿真计算机进行弹道仿真,仿真完成后仿真计算机将仿真结果数据传回数据服务器,数据服务器根据用户需求将与之相关模拟飞行数据传给交互计算机。

图5 系统结构及配置关系Fig.5 System Structure and Configuration Relationship
一方面,交互计算机响应用户使用需求(界面交互模块),通过功能模块分析出模拟飞行所需数据目录;另一方面,可视化模块完成对模拟飞行结果的视觉显示,实例系统效果如图6所示。
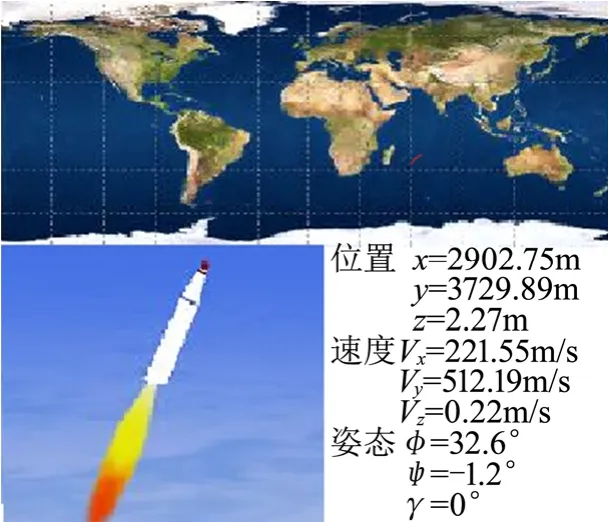
图6 模拟飞行可视化跟踪效果Fig.6 Simulated Flight Visualization Tracking Effect
数据服务器存储模拟打靶所需的各项数据(包括弹道诸元、试验统计、潜射环境水文气象等)数据,响应交互计算机数据目录需求,提取相应数据;并完成仿真数据的存储。
仿真计算机运行弹道仿真软件,根据弹道仿真数量与计算速度要求,可设置一定数量的仿真计算终端。
5 结束语
潜基弹道导弹处于动基座环境,对准、发射等技术复杂,误差源多,其模拟打靶技术现实需求迫切、技术难度大。本文从潜基弹道导弹模拟打靶技术的应用流程、建模、系统设计方法等方面进行研究和阐述,工程应用具有实用性、复用性及拓展性,能为不同型号潜基弹道导弹模拟打靶提供技术参考。
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
成都信息工程大学学报(2021年5期)2021-12-30
军民两用技术与产品(2021年9期)2021-11-27
天津外国语大学学报(2021年1期)2021-03-29
数字海洋与水下攻防(2020年5期)2021-01-04
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
初中生世界·九年级(2020年2期)2020-04-10
空气动力学学报(2019年5期)2019-12-31
电子制作(2019年7期)2019-04-25
