空中弱小目标检测跟踪测试基准
2019-02-13 08:23:40回丙伟宋志勇范红旗
航空兵器 2019年6期
回丙伟,宋志勇,王 琦,范红旗
(国防科技大学 电子科学学院 ATR重点实验室,长沙 410073)
0 引 言
近年来,各类轻巧型商业化无人机的蓬勃发展,为世界各国的空域安全带来了前所未有的威胁,无序飞行、缺乏管控的“低慢小”目标正日益成为防空目标识别面临的主要挑战。为应对潜在威胁、防范恐怖袭击和维护安全环境,国内外工业界和学术界均投入了大量资源和人力开展了广泛而深入的实验和研究,在许多方面取得了令人满意的成果。但“低慢小”防空探测作为一项开放式、对抗性、体系化的任务,在实际应用中仍然存在诸多难题亟待解决。本文旨在促进防空目标识别算法研究的广泛参与,集合全社会的智力资源解决当前重难点问题,针对雷达和红外成像两种典型的探测手段[1-2],基于前期本领域对空探测试验中积累的部分基础数据,推出了面向“空中弱小目标检测跟踪”测试基准,供相关领域科研人员开展算法研究和性能评测。同时,本文提供的测试基准已作为第二届“空天杯”创新创意大赛——探测识别算法挑战赛的赛题使用,收集到了全国高校及科研单位的数十份算法方案及其测试案例,本文将择优作为测试数据的基准算法,分别针对雷达和红外两个方向,从场景设计、指标体系和测试案例三个方面对本测试基准进行简要说明。
1 场景设计
雷达和红外成像数据均为地面背景下空中固定翼无人机目标的探测数据。由安装于二轴(方位轴和俯仰轴)转台上的试验雷达和中波红外相机分别获取得到。
试验雷达工作模式为宽带距离-多普勒模式,输入数据为脉冲压缩后的时域脉冲序列,迎面飞行多普勒为正,反之为负。雷达的载频为35 GHz,脉冲重复频率32 kHz。对于快时间维(每个脉冲),距离采样单元的间隔为1.875 m,距离波门长度固定(含319采样点),波门起始位置(对应第1个采样点)随目标移动,更新率为1 ms(32个脉冲更新一次),波门对应距离值的单位为m。
红外相机为制冷型中波红外相机,探测器波谱响应范围为3~5 μm,成像分辨率为256×256 pixels,相机拍摄频率为100 Hz,镜头视场角为3.0°×3.0°。
数据采集的配试目标为燃油动力固定翼无人机,其飞行速度约为30 km/h。目标无人机上装有GPS,目标航迹为事先设定程序,并在GPS的引导下自主飞行,同时无人机通过无线通信手段实时将自身的无人机位置坐标传回转台控制计算机,经测算后再引导二轴转台对无人机目标进行跟踪,以维持目标位于探测器的视场内。
采集过程中目标所处背景包括天空和地面两类,其中地面背景中包括村庄、农田、果园、建筑物、道路网、地面车辆以及人造生产生活设施等,目标环境特性较为复杂。在雷达数据中表现为杂波强度大,目标信杂比低;存在目标穿越主杂波的情况;同时存在大目标和小目标,且二者信噪比动态差异很大;目标运动复杂,存在机动情况;目标进出波束,存在目标数目变化情况[3]。红外成像数据中目标表现为弱小点目标,背景中存在辐射强度大于目标的红外辐射源;不同场景下目标的辐射强度存在较大差别[4]。
2 指标体系
本文为雷达和红外图像数据的算法测试结果评价定义了统一的指标体系和评分规则。根据算法运行结果计算算法性能得分。测试最终得分由检测跟踪得分和航迹连续性得分两部分累计得到。为区分检测跟踪精度,在测试评价中给出扩展框的定义,即以数据标注坐标为中心的扩展区域,(两类传感器数据及对应标注数据的下载地址参见参考文献[5]和[6]。)并根据扩展区域宽度的不同定义了W1和W2两个层级的扩展框。对检测跟踪的得分均通过扩展框W1和W2来定义。具体操作中由于雷达和红外光电数据探测体制的不同,其扩展框的描述方式分别根据其各自数据的物理含义来确定,如表1所示。
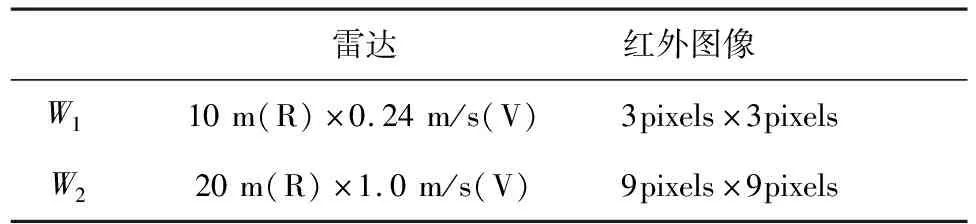
表1 雷达和红外图像数据的扩展框W1和W2定义
在上述扩展框定义的基础上,进而制定计分规则。
2.1 检测跟踪得分
(1)正确检测且精度满足预定要求,即有且仅有1个检测结果位于扩展框W1内(含),每个坐标位置得1分;
(2)正确检测但精度不满足预定要求,即有且仅有1个检测结果位于扩展框W1外但位于扩展框W2内(含),每个坐标位置得0分;
(3)漏检,即扩展框W2内(含)无检测结果,每个坐标位置减1分;
(4)虚警,即在扩展框W2外出现检测结果,或1个标注框内出现多余1个的检测结果,每个坐标位置减2分。
2.2 航迹连续性得分
在正确检测且满足预定精度的前提下,即在条目(1)情形下,每段数据的航迹连续性得分为:同一目标数量最多的航迹编号数目×1分。
3 测试案例
本测试基准经过了20余组“空天杯”参赛算法的反复测试。现将优秀测试算法总结如下。
3.1 雷达数据测试
对于给定场景下的雷达数据,测试算法分别提出和采用了MTI杂波对消抑制、Radon-Fourier变换、自适应匹配滤波器、Keystone变换、Dechirping补偿、相参-非相参联合积累、Ⅱ-CFAR、交互多模卡尔曼滤波、标签多伯努利平滑滤波、动态规划TBD、多网格/曲线解模糊、滑窗航迹匹配关联等技术。
目前本测试基准下针对雷达数据[5](第1至6段数据)的测试算法最高得分为1 165分,该方法提出了一套完整的脉冲多普勒(PD)雷达弱小目标高精度检测跟踪方案,具体包括:信号模型的建立、检测聚焦和多目标跟踪三个环节。在检测聚焦阶段,先利用高阶FIR滤波器滤除低频杂波,再使用Chirp-Z Transform(CZT)加速的Radon-Fourier变换(RFT)和自适应匹配滤波器(AMF)实现目标能量的融合聚焦,最后利用单元平均恒虚警率检测器(CA-CFAR)实现目标的检测;在多目标跟踪阶段,先进行点迹凝聚和帧间加速度估计的预处理,再利用标记多伯努利(LMB)平滑算法实现多目标跟踪,最后在有效轨迹提取后输出目标的最终轨迹。RFT和AMF融合聚焦方法可以有效实现信号中强目标和弱小目标的聚焦,提高了弱小目标检测前的信噪比,从而极大地提高了CFAR检测器对弱小目标的检测概率。LMB平滑器可以输出目标平滑后的轨迹,提高了距离和速度估计的精度。轨迹连续性判断和有效轨迹提取,可以有效克服速度抖动和速度模糊引起的轨迹断裂和虚假轨迹的问题。算法对测试数据处理的有效得分率达96.67%。算法流程图如图1所示,部分数据的检测跟踪结果如图2所示。

图1 算法方案流程图(雷达数据)
Fig.1 Flow chart of algorithm scheme(for radar data)
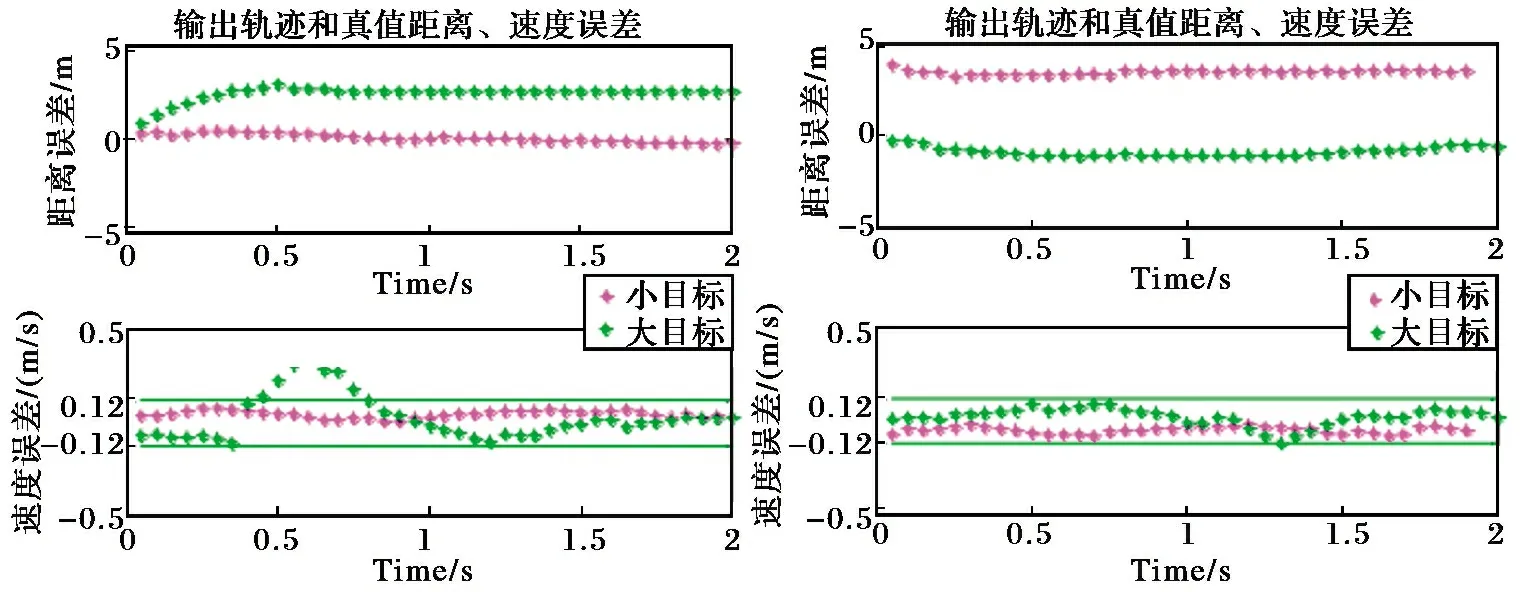
图2 部分数据的目标检测跟踪结果
Fig.2 Target detection and track results of partial radar data
3.2 红外数据测试
对于红外图像数据的弱小目标检测跟踪的测试算法可分为三类:基于深度学习的方法、基于传统图像分析的方法和混合方法。目前本测试基准下针对红外成像数据[6](第1至11段数据)的测试算法最高得分为13 434分,该方法采用了基于帧差法的红外目标检测方法,并面向目标长时间静止和目标-背景灰度对比度下降的情况分别提出了应对措施。针对目标长时间静止的问题,方案通过执行跳帧的多帧差法,重新捕获目标的运动信息。针对目标-背景灰度对比度下降的问题,方案提出了基于双阈值帧差法的目标检测方法。实验表明,双阈值帧差法可以极大地提高目标轨迹的连续性。针对天空背景下的红外目标,方案提出了使用推广结构张量(GST)算法做背景抑制,并配合迭代阈值分割法的红外目标检测方法。GST算法对目标的形状做了约束,因此可有效抑制背景杂波。将迭代阈值分割法应用在GST提取到的显著区域内,可以实现对红外目标的有效检测。结果表明,GST对背景抑制作用好。算法流程图如图3所示,部分数据的检测跟踪结果如图4所示。
4 结 束 语
本测试基准针对“低慢小”防空目标识别这一主题设计制备了一套涵盖雷达和红外成像两种探测手段的公开测试数据和性能评测规则,并在“空天杯”全国创新创意大赛探测识别算法挑战赛中得到应用。实践证明,本测试基准能够通过分类加权计分的方式实现对目标检测跟踪算法情形的完整覆盖,并对不同算法检测跟踪结果进行评测和定量考核,评价规则具有良好的可区分性和应用合理性。
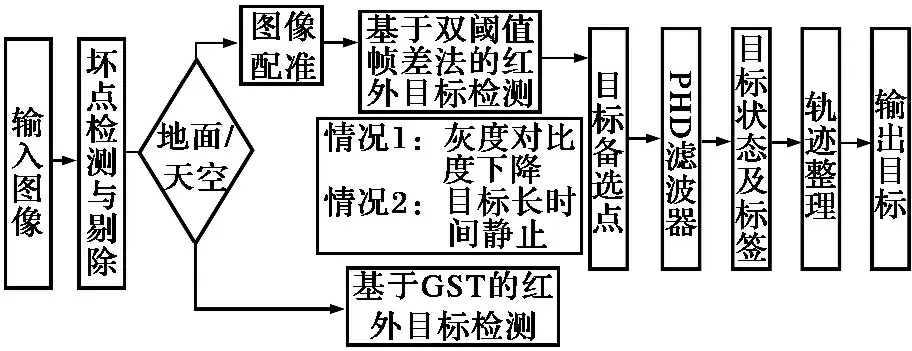
图3 算法方案流程图(红外数据)
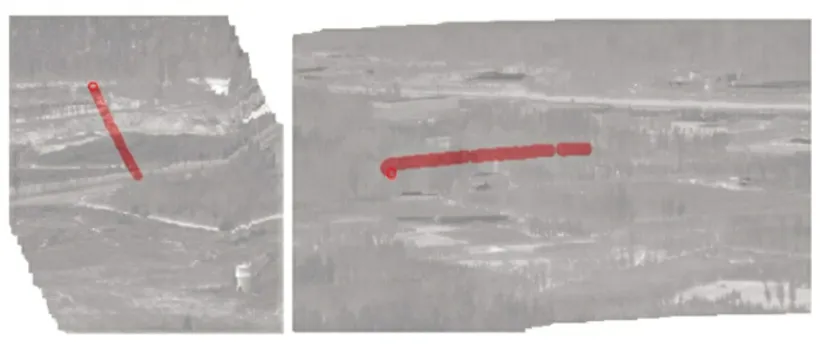
图4 部分数据的目标运动轨迹图
Fig.4 Target detection and track results of partial infrared data
接下来,我们将进一步增强数据集的完备性,重点贴近应用需求,完善多目标情形下的数据加工和评价准则制定。
猜你喜欢
疯狂英语·新悦读(2023年3期)2023-10-10 21:22:02
环球时报(2022-05-23)2022-05-23 11:28:37
金桥(2021年4期)2021-05-21 08:19:20
电子制作(2019年7期)2019-04-25 13:17:14
光学精密工程(2016年3期)2016-11-07 09:03:43
公民与法治(2016年19期)2016-05-17 04:18:15
宠物世界·猫迷(2015年7期)2015-05-30 10:48:04
读者·校园版(2015年7期)2015-05-14 13:11:40
红领巾·萌芽(2015年1期)2015-04-10 21:31:44
河南科技(2014年15期)2014-02-27 14:12:35