
飞行控制综合实验系统研制及应用
2019-01-30 02:22屈晓波史静平吕永玺王长青
实验技术与管理 2019年1期
屈晓波,史静平, 吕永玺, 王长青
(西北工业大学 自动化学院 实验教学中心, 陕西 西安 710072)
实践证明实验教学是人才培养的一个重要手段[1-2]。本校借助自主研发的飞行控制开放性综合实验设备,以“自行设计、自由探索、自己动手、自主创新”为原则开展创新实践。将课堂中讲述的理论知识与实际工程问题相结合,启发学生开展探索和研究式的自主学习和实践,增强学习和动手实践的能力,提高自主创新意识[3-4]。
飞行控制系统综合实验课程是一门结合了诸多实践环节的开放性综合实验,是面向学生创新能力培养,并运用探究式的实验教学模式进行深入研究。该实验课程依托我院自动化教学实验中心的团队科研资源而开展的新型教学实验。通过一系列精心设计的实验内容和问题启发、引导学生思考,为学生提供探究渠道和创新实践机会,提高学生在面对复杂实际工程时独立思考、分析问题和解决问题的综合能力[5- 6]。
1 实验系统总体方案
自主研发的面向有人驾驶/无人驾驶飞机的飞行控制半实物仿真教学实验平台集成了xPC实时仿真、VegaPrime三维视景仿真、GL Studio仪表显示、自动驾驶仪、数字舵机、小型缩比飞行平台等子系统[7-9],是一套闭环半物理实时仿真平台,可供飞行控制相关专业的实验教学使用。该系统以先进无人驾驶飞行器为被控对象,利用经典PID控制算法、现代飞行控制方法(特征结构配置、动态逆等)设计了飞机的自主飞行控制律,可进行数字仿真、半物理实时仿真验证,同时具备空中遥控飞行、自动驾驶飞行演示验证实验教学功能。
1.1 系统实现方案
根据实验系统建设目标,该实验教学系统满足人工操纵飞行控制实验、自动飞行控制实验的有效模拟,实验硬件尽可能贴近真实物理设备,促使学生对飞机对象和飞行控制系统组成的理解和掌握。总体方案见图1。
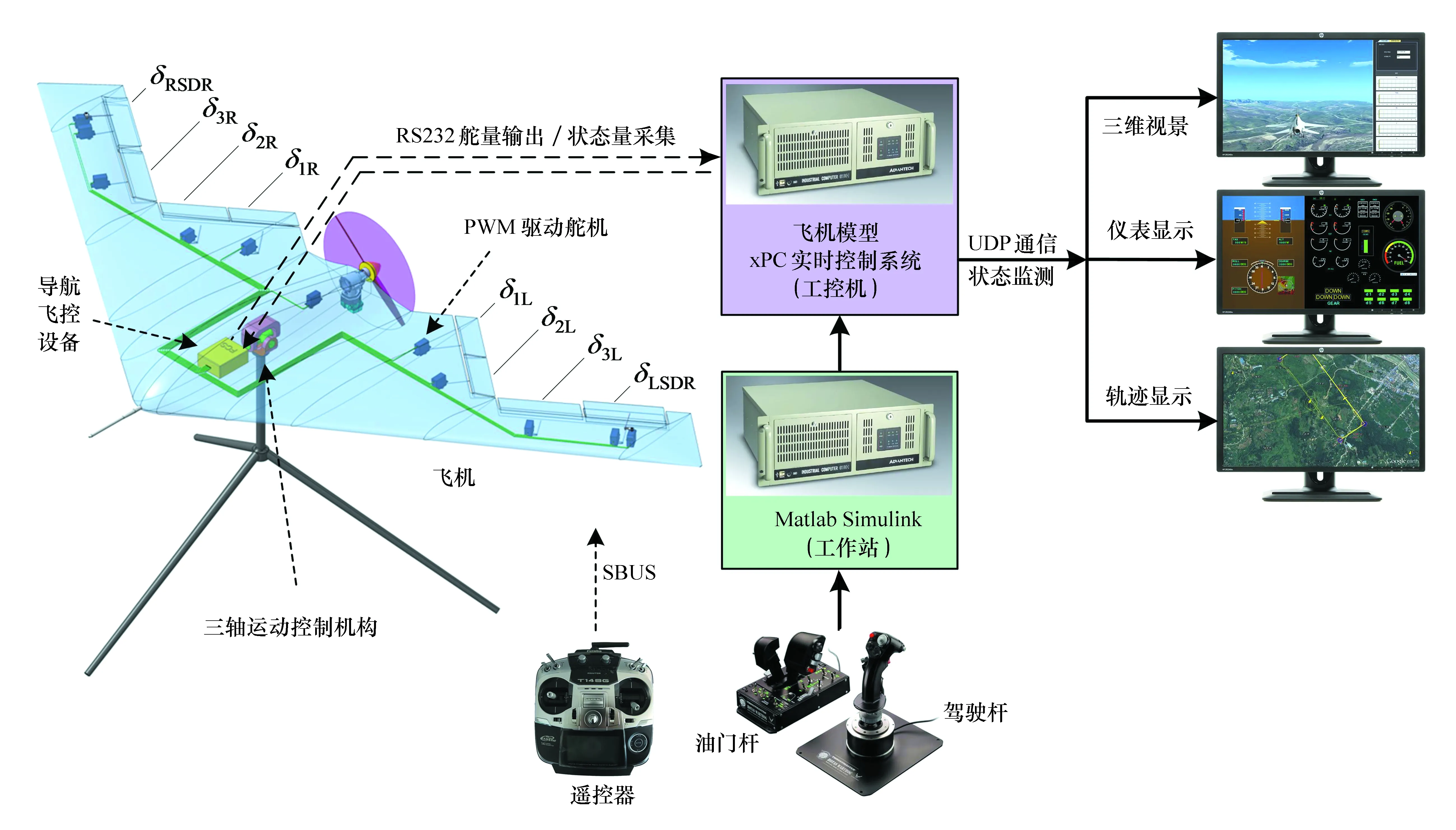
图1 飞行控制半物理实时仿真实验系统总体方案
1.1.1 飞机对象
选用为实验室自主设计开发的先进无人机平台(XQ-6B)作为被控对象(不限此对象),该飞机具有8个舵面、1个油门控制通道,如图1所示。舵面典型分配构型如下:δ1L、δ1R、δ2L、δ2R同向偏转,作为升降舵使用,用于控制飞机的俯仰运动;δ3L与δ3R差动组合偏转,作为副翼使用,用于控制飞机的滚转运动;左右两侧开裂式阻力方向舵dLSDR和dRSDR用于控制飞机的偏航运动[10]。该无人机不但可以作为实验设备用于室内实验教学,也可以进行室外遥控/自动飞行实验,从而提升学生对飞行控制的兴趣爱好,增强实验教学设备的体验感。
该飞机的气动模型方面:采用基于CFD计算+试飞修改方法获得的静态、动态气动数据。该无人机六自由度全量非线性仿真模型基于此数据搭建[10]。
1.1.2 小型导航飞控系统
针对飞行控制综合实验系统开发了一款基于STM32 Cortex-M4的硬件设备(DreamBuiler01),如图2所示。该系统集成了三轴加速度计、三轴陀螺、三轴磁力计、GPS等导航传感器设备,具备飞控解算、导航解算等功能,所有硬件接口均为学生开放。
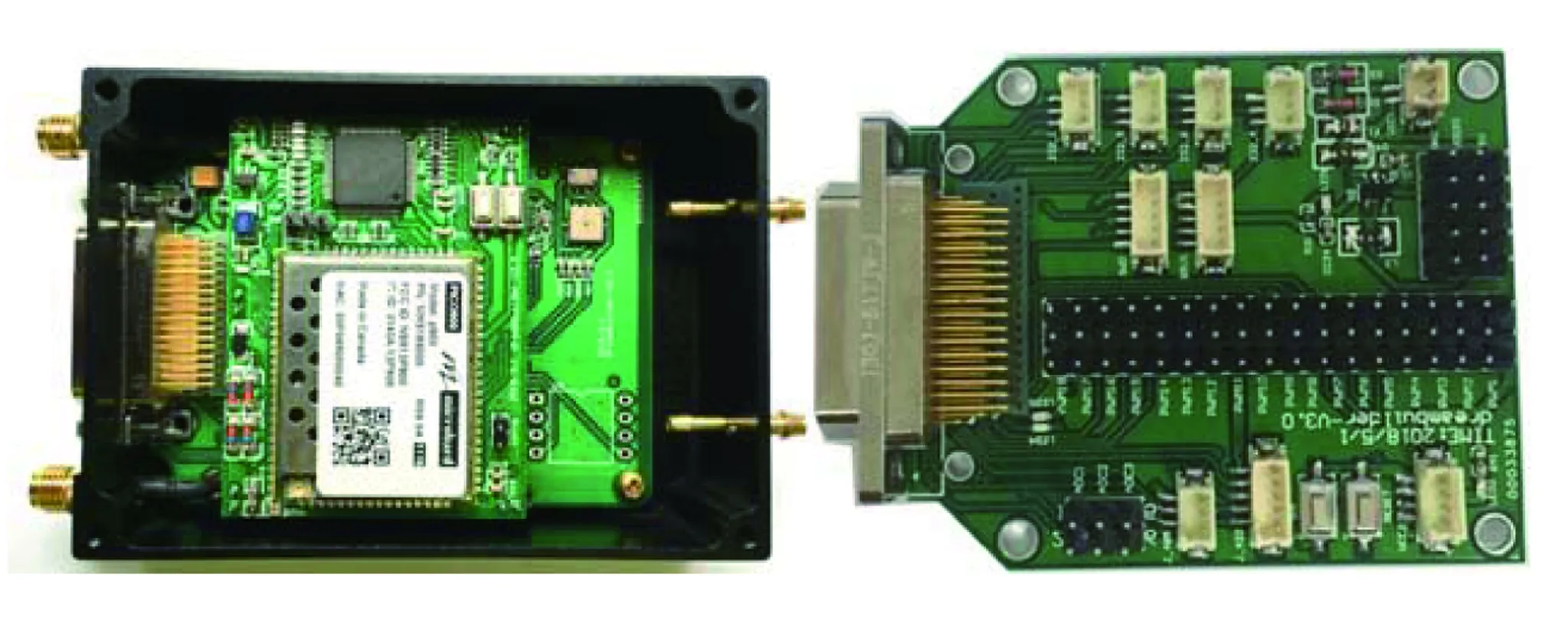
图2 DreamBuiler01 硬件(导航飞控、接口板)
实验的初始阶段,将编写在Keil软件上的飞控程序、导航程序经G-linker下载至DreamBuiler01。工作站显示与控制软件通过RS-232接口与DreamBuiler01通信,完成状态读取与指令发送功能[11]。飞行控制系统基本程序框架、板卡输入/输出接口程序、系统中断服务程序、舵机驱动程序、典型纵/侧向控制律人工飞行控制律程序、典型自动飞行控制系统程序均有实验教学人员为学生提前编写好,方便学生开展基本实验,以及各种创新型开放性综合实验。
1.1.3 驾驶机构
包括驾驶杆、脚蹬与油门杆,均采用USB通信接口与工作站相连。驾驶杆用于操纵飞机的俯仰和滚转控制通道;脚蹬用于飞机的航向控制;油门杆用于控制飞机的油门开度。
1.1.4 xPC 实时控制系统(工控机)
用于运行飞机的六自由度全量非线性仿真模型。该模型在工作站中搭建,完成测试检验后,以xPC target的模式通过8259网卡或RS-232串口下载到xPC工控机中。工控机上的xPC操作系统将实时运行并解算飞机数学模型(相当于虚拟飞机对象),通过UDP以太网络向运行在工作站上的显示与控制软件发送飞机状态数据。
1.1.5 工作站
运行Matlab Simulink 仿真分析软件[12-13]、三维视景显示与综合控制软件(各飞行控制模态实验),实时采集驾驶机构控制操纵数据,并作为控制指令输出至导航飞控系统中。另外,工作站上运行的三维视景子系统以UDP网络通信的方式接收由工控机(飞机模型)发送来的飞机状态数据,实时驱动3D飞机模型运动[14-16]。
1.1.6 执行机构
DreamBuiler01将控制律的解算输出作为舵机的数字输入信号,通过PWM波驱动方式直接输送至安装在被控飞机上的电动数字舵机,舵机在该指令后通过连杆机构驱动飞机的舵面偏转,各个舵面功能和极性配置按照被控飞机的舵面布置设定。
1.1.7 小型三轴运动控制机构
按照被控飞机机体内部几何尺寸和全机重量等约束条件,自制了小型三轴运动控制机构,安装在飞机重心位置,用于测量和直观地模拟飞机的三轴姿态角运动、姿态角速率参数信息,并将其作为反馈信号输入至飞行控制器进行控制律的解算。
2 系统工作原理
实验系统中工作站上运行Matlab Simulink仿真软件与显示、控制软件,工控机中运行被控飞机六自由度非线性仿真模型,导航飞控硬件中运行飞机的控制律[17-20]。系统工作原理如下:
(1) 对被控飞机进行配平、线性化处理,获得典型飞行状态下飞机的纵向、侧向线性化运动模型(状态方程),并分析飞机的纵向长周期长、短周期模态,横侧向滚转模态、螺旋模态和荷兰滚模态特性;
(2) 基于飞机线性模型设计人工操纵控制律、自动驾驶控制律、自动油门控制律等;
(3) 将所设计的诸多控制律代回非线性六自由度非线性模型,验证控制律是否能够满足国军标规范要求,并进行品质评价;
(4) 利用KEIL软件实现面向STM32 Cortex-M4的程序代码,并进行编译、下载和调试;其中,飞控计算机的基本程序框架、硬件输入/输出接口程序、系统中断服务程序、飞机舵机驱动程序、人工飞行控制律程序框架、典型自动飞行控制程序框架均为学员提前开发测试好;
(5) 连接并检查线缆,启动半物理仿真系统,机载导航飞控计算机电源接通,舵机电源接通,小型三轴运动控制机构电源上电;
(6) 采用Matlab Simulink以xPC Target的模式,将编译好的非线性模型通过8259网卡或232串口下载至工控机中,实现实时运行和解算;
(7) 导航飞控硬件根据驾驶杆操纵指令、反馈通道的飞行状态信息进行控制律解算,并将舵面指令输出发送至工控机和飞机模型,实现飞机舵面偏转;
(8) 工控机每一周期解算输出飞机状态数据将通过UDP通信模式回传至工作站中的显示与控制软件中,利用三维视景、动态仪表方式实现对飞机状态的监测和显示。
3 实验设备教学应用
3.1 教学实践
飞行控制综合实验设备经过不断改进、升级和优化,目前已作为实验教学设备投入使用,并已经在多个高校展开推广应用,该设备实物图、三维视景仿真软件主界面及实验室效果图如图3—图5所示。

图3 飞行控制综合实验系统实物图

图4 三维视景仿真软件主界面
图5 飞行控制综合实验室效果图
飞行控制综合实验课程涉及飞机总体、空气动力学、飞行力学、电机电气,以及导航制导与控制等学科知识,具有基础性、系统性、开放性、实践性、创新性5大特色。该实验教学系统主要使用对象包括自动化专业、飞行控制专业以及飞行器设计专业的本科生、研究生。可开展的典型飞行控制实验教学项目见表1。
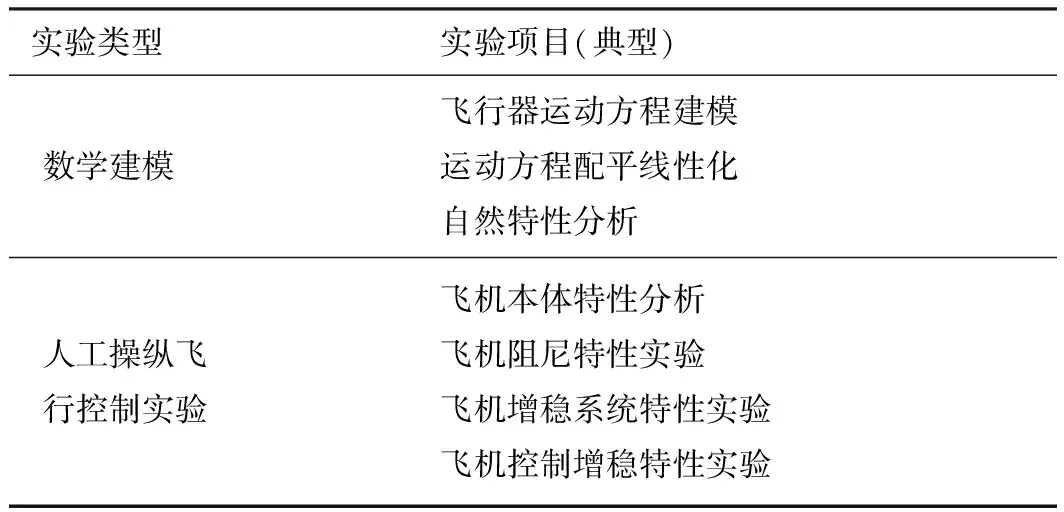
表1 典型飞行控制系统实验教学项目
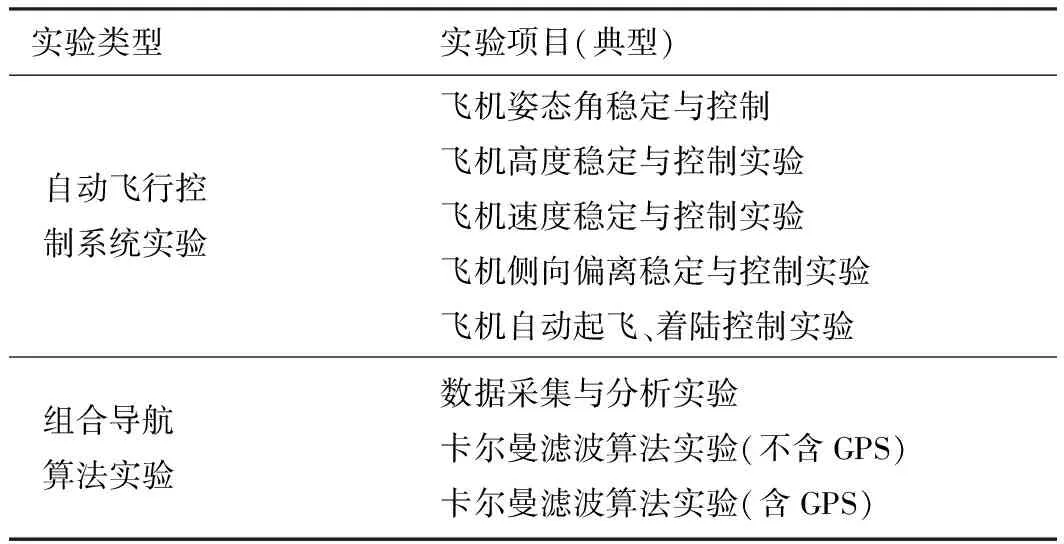
表1(续)
飞行控制综合实验课程以先进布局飞行器为控制对象,通过计算机模拟飞行、半物理实时仿真、真实遥控操作/自动驾驶飞行等丰富的实践内容,充分将相关基础知识、系统专业知识与实践操作相结合,最大限度地促使学生理解现代飞机/无人机的系统组成、掌握飞机自动控制的设计原理等,增强学生的实践能力,培养和提高学生的创新意识,实现学生综合素质提升。
3.2 教学反馈
逼真的被控对象和三维视景仿真环境极大地激发了学生学习的热情和动力,实实在在的飞机、舵机、发动机、导航飞控硬件(接口开放)等仪器设备为学生提供了探究式学习平台,可以明显培养并提高学生工程实践意识和解决实际问题的能力。飞机本身就是极为复杂的一个系统,借助于本综合实验系统,通过多层次、分阶段的实验教学项目,循序渐进培养学生对飞行控制系统的认知、分析、设计和综合系统测试的能力。同时,通过学生主动反馈、教师积极完善相关实验设备和实验内容,进一步优化实验教学方法,探索教学改革途径,提高实验教学水平和质量。
4 结语
以培养工程型、研究型人才的教学需求为指导,自主研发了基于STM32 Cortex-M4微处理器的飞控系统综合实验系统,并成功应用于国内诸多航空院校的飞行控制实验教学中,获得了良好的实验教学效果,培养和提高了学生的实践能力和创新意识。飞行控制系统实验设备的研制及应用,有助于实施开放性综合实验教学与实践,丰富和拓展实验教学资源,为“飞行动力学与飞行控制”核心课程以及“双一流”建设提供了有力支撑。
猜你喜欢
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
铁道通信信号(2020年12期)2020-03-29
自动化学报(2019年6期)2019-07-23
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
舰船科学技术(2015年8期)2015-02-27
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
自动化博览(2014年6期)2014-02-28
