成庄矿刮板输送机电气系统改进方案
2019-01-30 09:10郭曙光
山东煤炭科技 2019年1期
郭曙光
(山西晋城煤业集团成庄矿,山西 晋城 048021)
1 概述
刮板输送机是煤矿、选煤厂以及电厂等行业重要的运输设备。刮板输送机一般设计的环形长度约80m左右,机头和机尾都装配有电机,在传统的电气控制系统中,机头部分、机尾部分以及中部槽中都装有控制器,此设计成本较大,电气线缆铺设较长,产生故障的概率也较大。本文针对成庄矿现有刮板输送机的电气系统进行改进,只在机头部分安装主控制器,以CAN通信的方式实现对刮板输送机的电气控制。
2 系统设计
成庄矿刮板输送机电气系统改进方案的系统设计如图1所示。在该系统设计中,以机头控制器为控制核心,以CAN通讯的方式对刮板输送机中部槽、机尾、人机界面以及机头变频器和机尾变频器进行控制。其中机头控制器主要完成对刮板输送机各类传感器数据的采集、机头电机的控制、对中部槽、机尾以及人机界面的控制;中部槽控制附件主要完成刮板输送机的启动、停止、急停以及控制紧链装置等;机尾控制器附件主要完成机尾电机的控制以及卸货过程;人机界面主要完成对刮板输送机的动态监测以及故障诊断功能;机头变频器和机尾变频器主要完成对机头电机和机尾电机的变频控制。

图1 刮板输送机电气系统改进方案系统设计
3 硬件设计
成庄矿刮板输送机使用的核心硬件主要是PLC控制器以及扩展模块、变频器以及CAN通讯隔离栅。其中PLC控制器选用倍福的CX8050。CX8050控制器的处理器是32bit的ARM处理器,时钟频率为400MHz,有256MB的闪存,有64MB的RAM有一个Ethernet 10/100MBit/s的网络通讯接口,一个支持CAN的通讯接口。在本设计中需要扩展CAN通讯接口,使用的扩展模块为EL6751,该扩展模块可以扩展出一个CAN通讯接口。CX8050采用TwinCAT PLC软件进行程序设计,一般采用ST语言进行编程,使得编程更加的简洁、方便。变频器选用的是W4型变频器,该变频器体积小巧,安装方便,性能良好,并且支持CAN2.0B通讯。在进行CAN通讯时,采用屏蔽线,并且使用CAN通讯隔离栅对CAN通讯信号进行隔离,保证CAN通讯不受外界干扰,保证通讯的稳定性。
4 软件设计
4.1 PLC程序设计
本文提出的成庄矿刮板输送机电气系统改进方案的软件设计一共分为八个功能块,其中“初始化”主要完成对程序中所使用变量的初始化;“通讯状态监测”主要完成机头主控制器与其他CAN通讯从站的通讯状态监测,如果通讯中断,即在人机界面上提示通讯故障;“与中部槽通讯过程”、“与机尾通讯过程”、“与人机界面通讯过程”、“与机头变频器通讯过程”以及“与机尾变频器通讯过程”该五个功能块主要完成CAN通讯过程,包括CAN通讯的启动、数据的接收以及发送。“模拟量处理”过程主要完成对系统模拟的处理,如刮板输送机的油箱油温、油位的处理;“逻辑控制”主要完成系统的逻辑控制,包括对按钮的控制、远程/本地操作控制、单机/联锁控制等功能;“电机控制”主要完成对机头电机和机尾电机的启动、停止、加速、减速等控制;“保护控制”主要完成对电机过流、过载、缺相、断相、两相粘连等保护功能。在进行PLC程序设计时,上述八个功能块都各自作为一个程序功能块,在main主程序中分别调用,这样在编写和调试程序时都非常的方便。
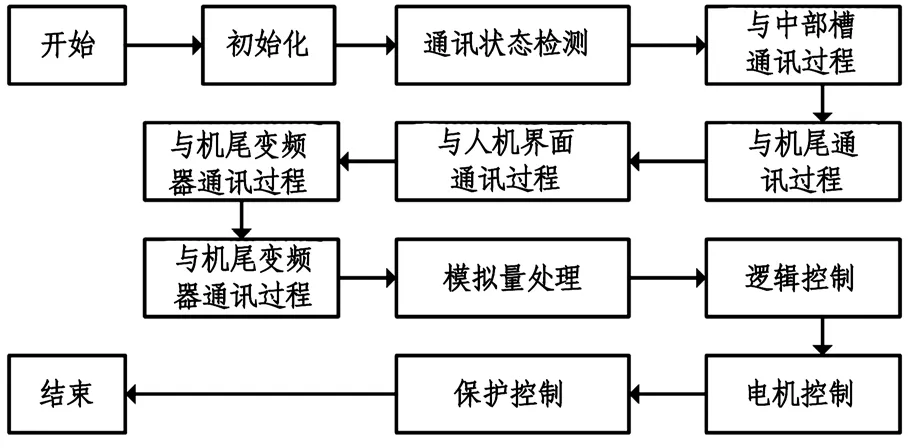
图2 PLC程序设计
4.2 CAN通讯设计
在CAN通讯设计中,将机头核心控制器作为CAN通讯的主站,机头变频器作为2号从站,机尾变频器作为3号从站,中部槽作为4号从站,机尾作为5号从站,人机界面作为6号从站。采用CAN2.0B通信协议,波特率为250kbps,帧格式为标准帧格式。在进行CAN通讯时,需要协商并确定CAN通讯协议。本文涉及到的CAN通讯从站有5个,由于篇幅所限,以下仅给出核心控制器与变频器以及人机界面的CAN通讯协议。
(1)与变频器的CAN通讯协议
在本系统中有两个变频器,即机头变频器和机尾变频器,从站号分别为2号和3号,以下通信协议的描述中,以2号从站为例。表1中描述的是机头核心控制器与2号变频器从站的CAN通信协议。
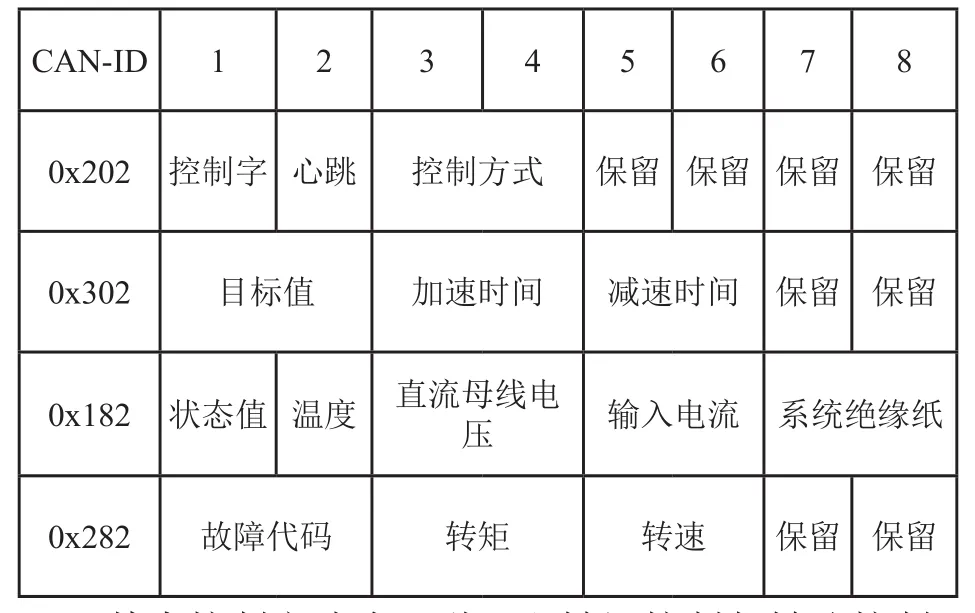
表1 机头核心控制器与2号变频器从站的CAN通信协议
其中控制方式有两种,即转矩控制与转速控制,表1中的“控制方式”为一个宏,即PLC控制器对变频器的控制既可以是转矩控制也可以是转速控制,相应的“加速时间”和“减速时间”也有不同的物理意义,具体见表2所示。
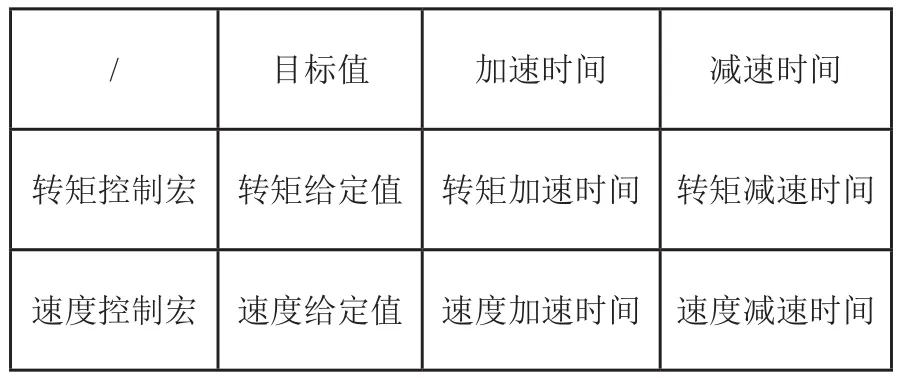
表2 宏-控制方式的物理意义
(2)与人机界面的CAN通讯协议
该系统中刮板运输机在运行时,各个参数变量以及状态以人机界面的形式进行输出,方便技术人员查看和调试。人机界面是CAN通信的6号从站,表3中描述的是机头核心控制器与6号人机界面从站的CAN通信协议。
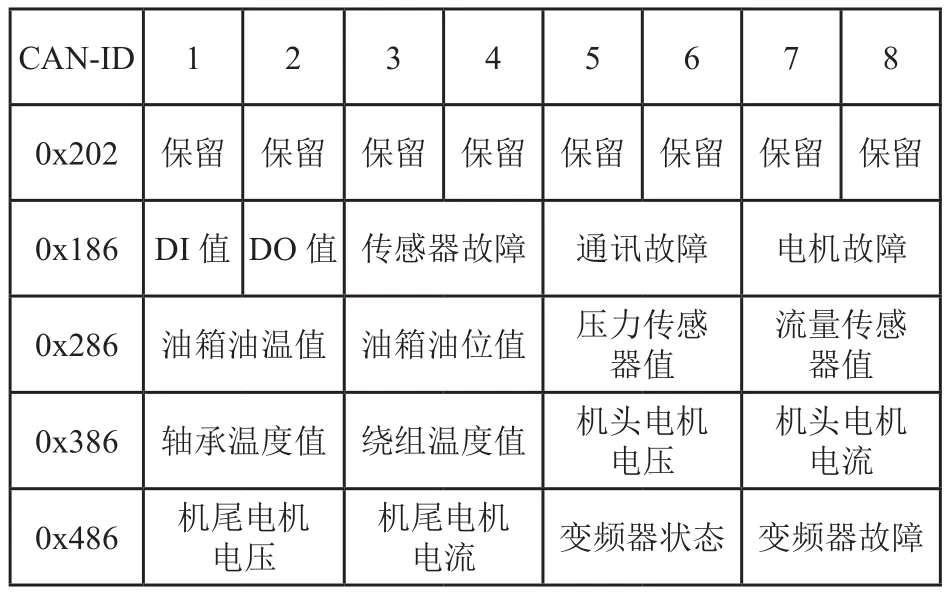
表3 机头核心控制器与6号人机界面的CAN通信协议
5 人机界面
本文提出的成庄矿刮板输送机电气系统改进方案的人机界面如图3所示,图中列出了数字量输入点、数字量输出点、传感器类故障、通讯类故障、电机故障以及控制方式等。在本地测试和实际使用中,该人机界面都起着非常大的作用。
6 结语
本文以成庄矿刮板输送机为研究对象,对现有的电气系统进行改进,以机头控制器为控制核心,与中部槽附件、机尾附件、人机界面、机头变频器以及机尾变频器以CAN通信的方式实现对刮板输送机的整体控制以及人机界面数据的输出。文章详细给出了系统设计、硬件设计以及软件设计,并给出机头核心控制器与变频器以及与人机界面的CAN通信协议。通过人机界面进行本地测试,并将该系统应用于洗煤厂刮板输送机,该系统运行稳定,故障率低,值得推广。
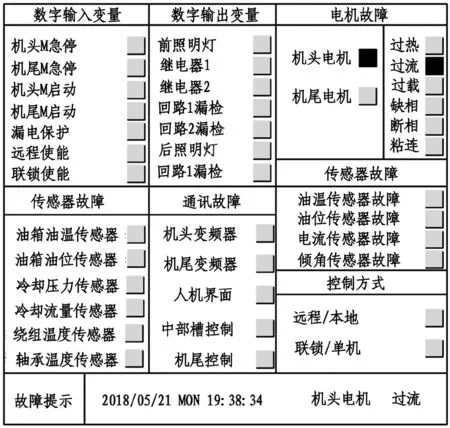
图3 刮板输送机的人机界面
猜你喜欢
山东煤炭科技(2021年4期)2021-05-13
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2016年1期)2016-06-01
通信电源技术(2016年3期)2016-03-26
科技与企业(2015年18期)2015-10-21
铁路通信信号工程技术(2015年4期)2015-02-28
自动化博览(2014年10期)2014-02-28
铁路通信信号工程技术(2014年5期)2014-02-28
铁路通信信号工程技术(2014年1期)2014-02-28
铁路通信信号工程技术(2014年1期)2014-02-28