
深海海底反射会聚区声传播特性∗
2019-01-25 09:53张鹏李整林吴立新张仁和秦继兴
物理学报 2019年1期
张鹏 李整林 吴立新 张仁和 秦继兴
1)(中国科学院声学研究所,声场声信息国家重点实验室,北京 100190)
2)(中国科学院大学电子电气与通信工程学院,北京 100049)
(2018年9月26日收到;2018年11月9日收到修改稿)
在深海声道条件下,海水折射效应会使得声场出现会聚效应;在不完全声道条件下,深海海底对声场具有重要影响.利用在中国南海海域收集到的一次深海声传播实验数据,研究了深海不完全声道环境下的海底反射对声传播的影响.实验观测到不同于深海会聚区的海底反射会聚现象,在直达声区范围内的海底地形隆起可导致海底反射会聚区提前形成,并使得部分影区的声强明显提高.由于不平坦海底和海面的反射破坏了完全声道环境下的会聚区结构,在60 km范围内存在两个海底反射会聚区,会聚区增益可达10 dB以上,同时在11 km附近的影区和51 km附近形成高声强区域.当接收深度与声源深度相同时,第二会聚区的增益高于第一会聚区.在第一会聚区内,随着接收深度的增加,声线到达结构趋于复杂,多途效应更加明显.使用抛物方程数值分析结合射线理论对深海海底反射会聚区现象产生的物理原因进行了分析解释.研究结果对于声纳在深海复杂环境下的性能分析具有重要的指导意义.
1 引 言
声速剖面随深度的变化而导致的声场会聚区效应是深海海区一个重要的水声环境特性[1],利用声传播的会聚区效应,可以更好地实现远程水声通信和探测.低频声信号的会聚区传播对实现远程水声通信系统和潜艇低频噪声的探测性能分析和预报具有重要的意义.
Hale[2]很久以前就在海上实验中观测到很强的会聚区效应,并对实验结果进行了详细地研究.Urick[3]使用射线理论分析了会聚区随声源深度变化的情况.布列霍夫斯基赫等[4]则从波动理论出发,给出了会聚区焦散线的聚焦因子公式.Williams和Horul[5]应用简正波理论研究海洋声场的会聚现象,指出会聚区是由大量同相简正波的叠加形成的.张仁和[6]在声场简正波理论的基础上,利用广义相积分近似得出了会聚区增益的解析表达式,解决了经典射线理论在反转点会聚区发散的困难.这些理论都深刻地揭示了海洋声传播的规律,能够较为准确地预报会聚区的位置,但他们的讨论都着重于声波在典型深海SOFAR声道中的传播问题.声波在SOFAR声道中传播时,大部分声线在未触及海底之前就发生反转,因而海底的影响可以忽略.在深海不完全声道中,当海底处的海水声速小于海面附近声源处的海水声速时,其声场主要由海底反射声波所形成,这个时候海底的反射损失和海底剖面成为影响海洋声传播的重要因素,有必要仔细考虑海底边界的声学特性.
张仁和等[7]应用反转点会聚区理论,引入最小掠射角的海底反射系数因子,计算讨论了深海负梯度剖面下海底反射形成的会聚区的问题,并从实验数据中得到最小掠射角的海底反射系数.但是该论文中并没有直接描述海底的声学特性,理论计算的会聚区位置和增益与实验结果也存在一定的误差.王刚[8]应用WKBZ简正波方法,对深海负梯度声速剖面下的海底反射会聚区进行了研究.范培勤等[9]利用海洋环境统计数据与反射会聚区特征参数计算模型,仿真实现了海底反射会聚区距离的快速预报,但是缺乏相关实验数据的支持.针对海底地形变化以及沉积层的特性对声传播效应的影响,许多水声学者进行了较为深入的研究[10-21].李文等[10]对深海海底山二维声传播规律进行了研究,由于海底山的反射遮挡效应,深海会聚区结构遭到破坏,传播损失增大.秦继兴等[11]利用大陆坡海域的实验数据,分析了下坡时声源位于海面附近和浅海斜坡表面时斜坡对声传播的影响.胡治国等[12]、杨坤德等[13]研究了深海海底斜坡的复杂地形下的声传播规律,分析了不平坦海底引起的传播损失异常的机理.
本文利用一次南海深海声传播实验数据,分析了存在复杂地形的不完全声道条件下海底反射会聚区的声传播规律,通过射线模型分析脉冲到达结构与本征声线到达时间,解释海底反射会聚现象.
2 深海不完全声道条件下声传播
2018年4月,中科院声学所声场声信息国家重点实验室在中国南海进行了一次综合性的海上实验,其中主要内容之一是研究深海复杂环境下的声传播特性.海上实验设备布放示意图如图1所示,采用的是实验船结合深海声学接收潜标的作业方式进行,其中接收潜标系统由20个自容式水听器(USR)组成,USR以非等间距方式布放在85—3400 m深度范围内,接收灵敏度为-170 dB,信号的采样率为16 kHz.实验1号科考船以4节的航速拖曳发射换能器,并发射频带范围为250—350 Hz的双曲调频(hyperbolic frequency modulated,HFM)信号,拖曳换能器的深度在150 m左右.发射信号的时序如图2所示,每次发射信号时间长度为20 s,两个信号间隔20 s,连续发射4次信号后再空50 s,一轮信号总共持续时间190 s.发射声源级为192 dB.
图3给出了声传播实验路径上距离接收潜标180 km范围内的海深.由图3可见,传播路径上的海底地形变化较为复杂,20 km内有一个高度500 m的海底小山,海底地形起伏较大,20—80 km距离上海深变化较小,地形整体较为平坦,80 km处海深急剧减小到2800 m左右,80 km以后的海深稳定在2700 m附近.实验期间使用抛弃式温盐深探头(conductivity temperature depth,CTD)和抛弃式温度探头(expendable bathy thermograph,XBT)每隔10 km对海水声速剖面进行了一次测量,不同距离上的声速剖面变化较小,其中接收位置处的声速剖面如图4所示.图4中黑色圆点表示接收阵的20个水听器布放深度.实测的声速剖面最大深度为1200 m,由于声道轴以下的声速剖面随时间变化较为稳定,因此1200 m以下未测量深度的声速剖面从数据库查询获得,将其与实测声速插值连接得到完整深度的声速剖面.由图4可见,实验测线海域为较典型的深海不完全声道,声道轴位于1100 m深度附近,海底最深处声速为1515 m/s,小于海面处海水声速1539 m/s.图4中蓝色虚线表示拖曳声源所在深度150 m,蓝色实线表示声源深度处的声速,与海底处的海水声速接近,但是在10 km以后海底位置的声速小于声源位置处的声速.因此,海底对于声波的反射作用不可忽视.
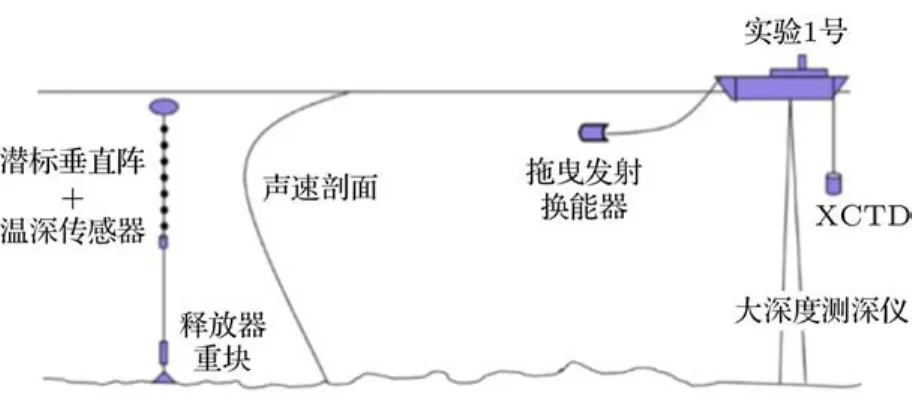
图1 声传播实验设备布放示意图Fig.1.Experimental con figuration.
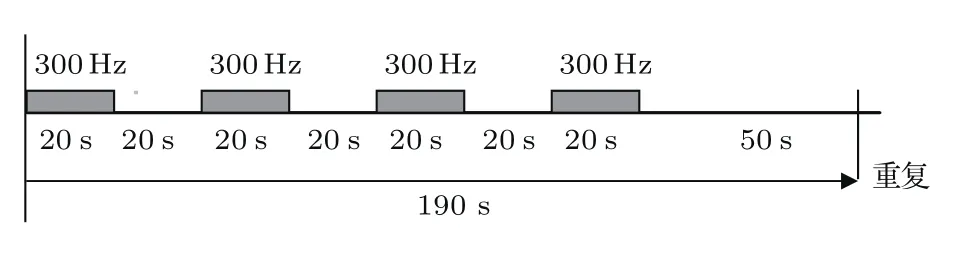
图2 发射信号序列示意图Fig.2.The acoustic emission signal during the experiment.

图3 声传播路径上的海深变化Fig.3.The bathymetry along the propagation track.

图4 实验中测量的海水声速剖面Fig.4.Sound speed pro file during the experiment.
为了获得海底声学特性,实验中在接收潜标位置附近进行了海底底质采样,采集的海底样品总长度为190 cm.采样分析结果如表1所列,底质类型为粉砂质黏土,海底表层处沉积层的声速和密度分布较为均匀,平均声速为1499 m/s,平均密度为1.36 g/cm3,底质采样测量结果为海底参数的选取提供了重要参考依据.
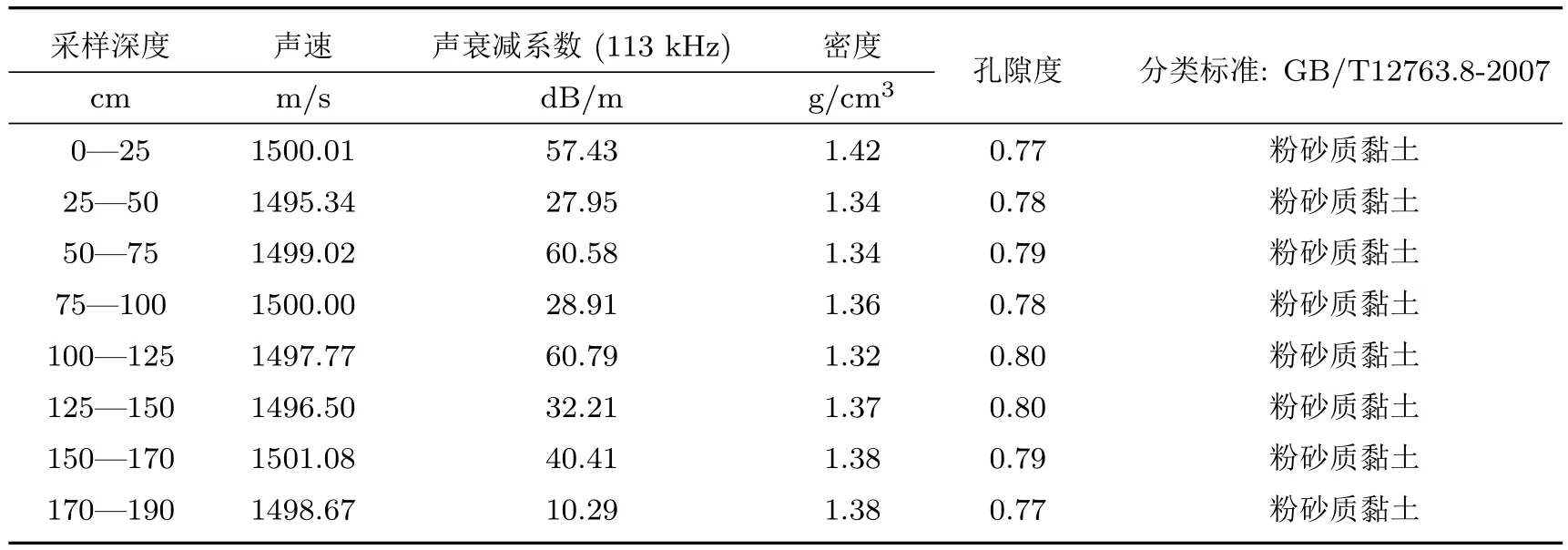
表1 潜标位置附近的海底底质采样Table 1.Seabed sampling near the receiving array.
将实验中接收到的声信号记为x(t),对其进行脉冲压缩来提高信噪比,得到脉压信号xc(t),再经过离散傅里叶变换得到信号的频谱Xi,并且在中心频率f0=300 Hz的实验发射信号带宽内(100 Hz)求取平均,得到窄带信号的平均能量为

式中,Fs为采样率,f1和f2为发射信号频率的上下限,nf1和nf2分别为频率上下限对应的频点数.
实验的传播损失可以表示为

式中,SL(f0)为发射换能器声源级,Mv为接收水听器的灵敏度,EC为根据已知的发射声源信号计算得到的脉冲压缩时频增益.
最后,得到传播路径上实验的二维传播损失如图5(a)所示.从图5(a)中可以看到,在60 km距离内存在两个明显的会聚区结构,而60 km以外的会聚区结构并不明显,因此我们选取前60 km距离上的传播损失(图5(b)).在60 km距离内可以观察到两个明显的会聚区结构,它们分别位于20和40 km的距离附近.同时,在11和51 km附近可以观测到两个较明显的声增强区域.此外需要说明:图5中给出了整个深度的传播损失结果,由于实验中在较大深度上水听器布放间距较大,所以绘图时两个相邻接收深度中间插值得到的传播损失结果与实际声场分布情况有偏差,但在有水听器的接收深度上,实验传播损失结果可以反映实际声场分布情况.
为了分析图5所示的实验现象,使用了抛物方程近似声场模型(range-dependent acoustic modelparabolic equation,RAM-PE[22,23])计算海深水平变化环境下的声传播损失,选择与实验换能器发射信号相同的声源中心频率和带宽,频率间隔10 Hz,频点数为11.海底参数选取两层海底模型,其中沉积层厚度为20 m,根据采样测量结果,沉积层声速和密度分别选为1499 m/s和1.36 g/cm3,无限大基底的声速取为1650 m/s,密度为1.8 g/cm3,沉积层和基底的衰减系数取[24]

选取两种海底地形进行对比,第一种地形是实验中同步测量的海底地形(图3),第二种地形是接收位置处海深的平坦海底.根据声学互易原理,理论计算时将声源置于0 km距离处不同水听器所在深度,在拖曳声源深度的不同距离处接收信号.由于实验中在声道轴以下布设的水听器较为稀疏,所以图5中大深度位置直达声区与影区之间的声传播损失会因插值出现不平滑,为避免出现这种现象,模型计算时声道轴以下的接收深度增加,最终得到两种地形下的二维声传播损失(图6).
对比图5(b)和图6(a)可以发现,实测地形下仿真结果与实验数据处理得到的传播损失较为符合.对比图6中实测地形(a)和平坦地形(b)下的仿真结果,实测地形下在60 km内存在两个明显的会聚区结构,声线经过海底小山丘的反射作用在20 km附近形成海底反射会聚区,有一部分直达声线和第一会聚区海水折射到达声线一起经海底反射后在40 km附近形成第二个海底反射会聚区.而平坦海底环境下,部分折射路径的声线不与海底相互作用,经过海水折射后到达50 km附近形成会聚区,在10—40 km的影区内,海底反射使得声能量较高,但其随空间的分布较图6(a)均匀.
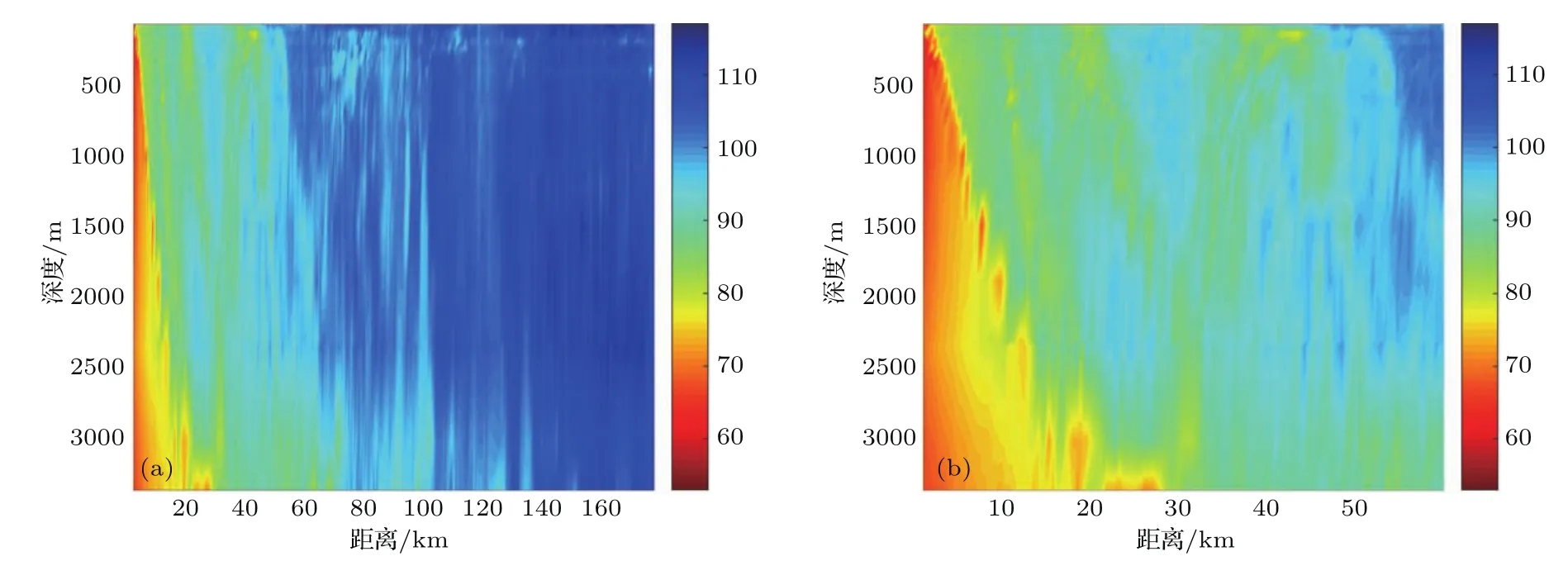
图5 实验传播损失随距离和深度变化 (a)0—180 km;(b)0—60 kmFig.5.Two dimensional experimental TLs:(a)0–180 km;(b)0–60 km.

图6 RAM-PE模型计算的声传播损失 (a)实测海深;(b)平坦海底Fig.6.Numerical TLs results from RAM-PE model:(a)Real bathymetry;(b) flat bottom.
为了定量分析其中的实验现象,图7给出了四个典型深度(85,145,1008和3021 m)上的传播损失对比.图7结果可以进一步证实实验结果与实测海底环境下的模型计算结果较为一致.实测地形下在20和40 km附近出现了两个会聚区,随着接收深度增加,到1008 m深度处出现会聚区分裂现象.在本文中,将会聚区与其附近影区内传播损失的差值称作会聚区增益.与第一会聚区相比,相同接收深度上第二会聚区的距离跨度更大,两个会聚区的增益都在10 dB左右,在145 m深度上的第二会聚区增益高于其他接收深度的会聚区增益,甚至高于第一会聚区.此外,在145 m深度上,距离11和51 km位置附近可观察到两个声强增大的区域,其增益小于20和40 km处的会聚区增益,但是85 m接收深度上仅在11 km处存在声增强区域,并没有51 km处的声强增大区域.
在平坦地形下,85 m深度上没有出现会聚区,但是在10—40 km内存在随空间均匀分布的声能量增强区域,这个区域同样在145 m深度上出现,而且145 m深度上在51 km处可观测到一个明显的会聚区,其增益达到25 dB以上,远大于实验环境下的会聚区增益.在1008 m深度上会聚区发生分裂,但是仍具有较高的增益.在靠近海底的3021 m处,平坦地形下的计算结果与实验结果在35 km以内较为符合,直达声区延伸至20 km附近,在31 km附近存在一个明显的声增强区域,增益到达15 dB以上,所以其传播损失整体小于浅深度位置的结果.在35 km以后,随着距离的增加,实验传播损失逐渐减小,而平坦海底下声传播损失逐渐增大.

图7 四个不同接收深度实验传播损失与模型计算结果比较 (a)接收深度85 m;(b)接收深度145 m;(c)接收深度1008 m;(d)接收深度3021 mFig.7.Comparison of experimental TLs and numerical TLs at four different receivers:(a)85 m;(b)145 m;(c)1008 m;(d)3021 m.
3 海底反射会聚区现象的理论解释
为了解释图5和图7中实验观测到的一些特殊深度和距离条件下的海底反射会聚现象,我们利用射线进行分析.根据互易原理,图8给出了两种海底地形情况下声源深度在145 m处的声线图,图中0 km处黑色圆点表示声源位置,黑色的虚线表示对应的150 m的互易接收深度.其中:蓝绿色声线表示经过多次海底海面反射的声线,红色声线表示只与海底发生一次相互作用的声线,绿色声线表示只与海面发生作用的声线,蓝色声线表示只经过海水折射,不与海底、海面相互作用的声线.在海底附近,海水声速与声源位置处的声速接近,除了极少数小掠射角的声线可以在到达海底之前发生反转,其他大部分声线都不满足发生反转的条件,因此大部分声线会与海底发生相互作用,这个结论与图8(a)的仿真结果相符合.从图8(a)可以看到,大多数声线都经过海底海面的多次反射,剩下一小部分小掠射角声线经过多次海底反射,不与海面相互作用.还有极少数的小掠射角声线可以发生反转,不与海面和海底发生相互作用.图8(b)中的一部分声线不与海底海面相互作用,经过水体折射后在51 km附近形成会聚区,平坦海底情况下的海底附近声速大于声源位置处声速,因此小掠射角的声线在到达海底之前就可以发生反转.大掠射角的声线经海底海面多次反射或者只经过一次海底反射,在第一影区范围内形成较高声能量,但是并没有形成会聚区结构.观察图8中声线轨迹,发现大量的声线经过多次海底反射到达海底后会被完全吸收,这是由于海底沉积层声速较小,对到达海底的声吸收较强,除了极少数小掠射角的声线不与海底相互作用或者相互作用次数较少,大多数经多次海底反射后的反射损失较大,这也可以解释图5(a)中60 km以后声能量较弱,会聚区结构不明显的实验现象.
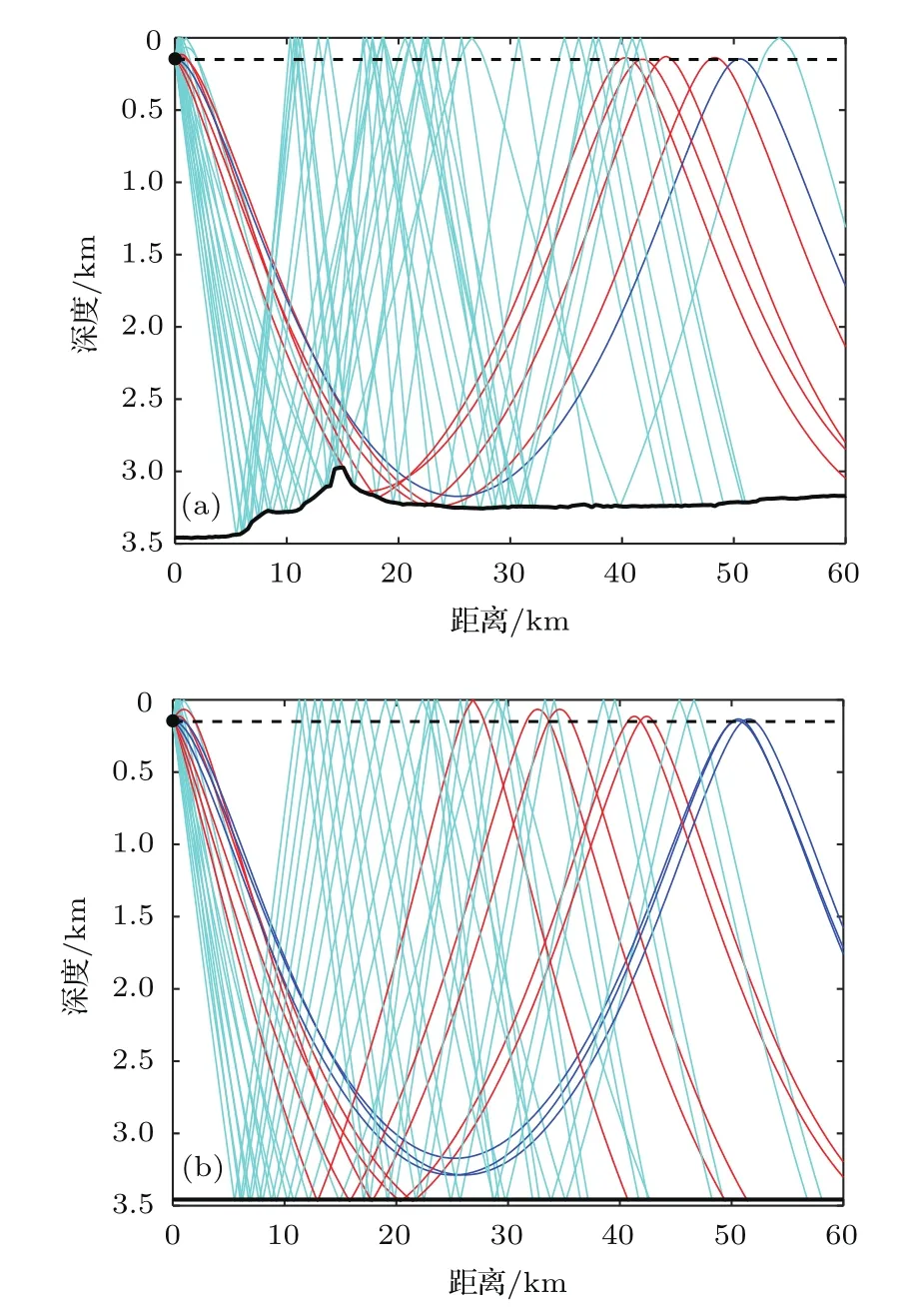
图8 145 m深度声源的声线图 (a)实测地形;(b)平坦地形.黑色圆点表示声源深度在145 m深度,黑色虚线表示150 m互易接收深度Fig.8.Rays traces for two different bathymetry:(a)The real bathymetry;(b)the flat bottom.Black dots mark the source depth at 145 m,and black dashed line indicates the receiver depth at 150 m.
观察图8(a)中150 m深度上的声线,可见实测地形下在20和40 km附近有大量声线到达,对应图7(b)中的两个海底反射会聚区.在11和51 km附近也有一部分声线到达,形成了声能量相对较高的区域,其中51 km附近是由于少量经海水折射后到达的声线引起的声能量增强,这与传播损失仿真的结果相符合.平坦海底(图8(b))下声线虽经过多次海底反射,但没有出现类似图8(a)中由于海底小山的遮挡作用导致的声线在某一区域比较集中到达的现象,所以在10—40 km范围内声场分布较为均匀.与图8(a)相比,有较多的小掠射角声线会经过海水折射后在51 km附近形成反转点会聚区.这些声线仿真结果与图7(b)中两种地形情况下的传播损失结果相匹配.
图9给出了85,1008,和3021 m这三个互易声源深度上的声线图.图9(a)和图9(b)两种地形条件下的85 m声源深度上,由于其声速大于海底附近声速,不满足声线发生反转的条件,声线都会与海底相互作用.图9(a)中声线经不平海底的一次反射后在11,20 km附近聚集,第一海底反射会聚区20 km处的声线经30 km处的海底反射在40 km附近聚集形成第二个海底反射会聚区,在51 km没有海水折射的声线到达,因此在图7(a)中的85 m接收深度上的这个位置处并没有观察到声增强区域.图9(b)中声线没有出现图9(a)中在部分距离上相对集中的到达形成的会聚区域,而是相对均匀地分布在10—40 km的距离上,形成了图7(a)中的高声强区域.图9(c)在1008 m声道轴附近的声源深度上,20 km距离处,左侧仅有经过一次海底海面反射的声线到达,右侧除了一次海底海面反射到达的声线,还有一部分只经过一次海底反射到达的声线,因此右侧的声增益高于左侧;在40 km处也有明显的分裂现象;51 km附近并没有声线到达,因此在图7(c)的1008 m接收深度上的51 km距离处没有出现声增强区域.图9(d)的平坦地形下,40 km以内的声线到达相对均匀,在45和56 km处有部分只经过海水折射的声线到达,形成图7(c)中两个高声强的会聚区分裂结构.
图9(e)和图9(f)在海底附近的声源深度上,20 km以内有大量的直达声线和一次海底反射声线,因此声能量较高,在30 km处,大量的两次海底反射声线和部分直达声线到达,传播损失较小.但是,由于海底反射损失的声能量较大,因此增益小于20 km以内的区域.40 km以外的距离上,实测地形下有多次海底反射声线到达,且到达数量随着距离的增加而增多,平坦海底下40 km以后仅有较少数的多次海底反射声线到达,且随着距离的增加,到达声线与海底作用的次数逐渐增加,因此传播损失小于实测地形且差距逐渐增大.
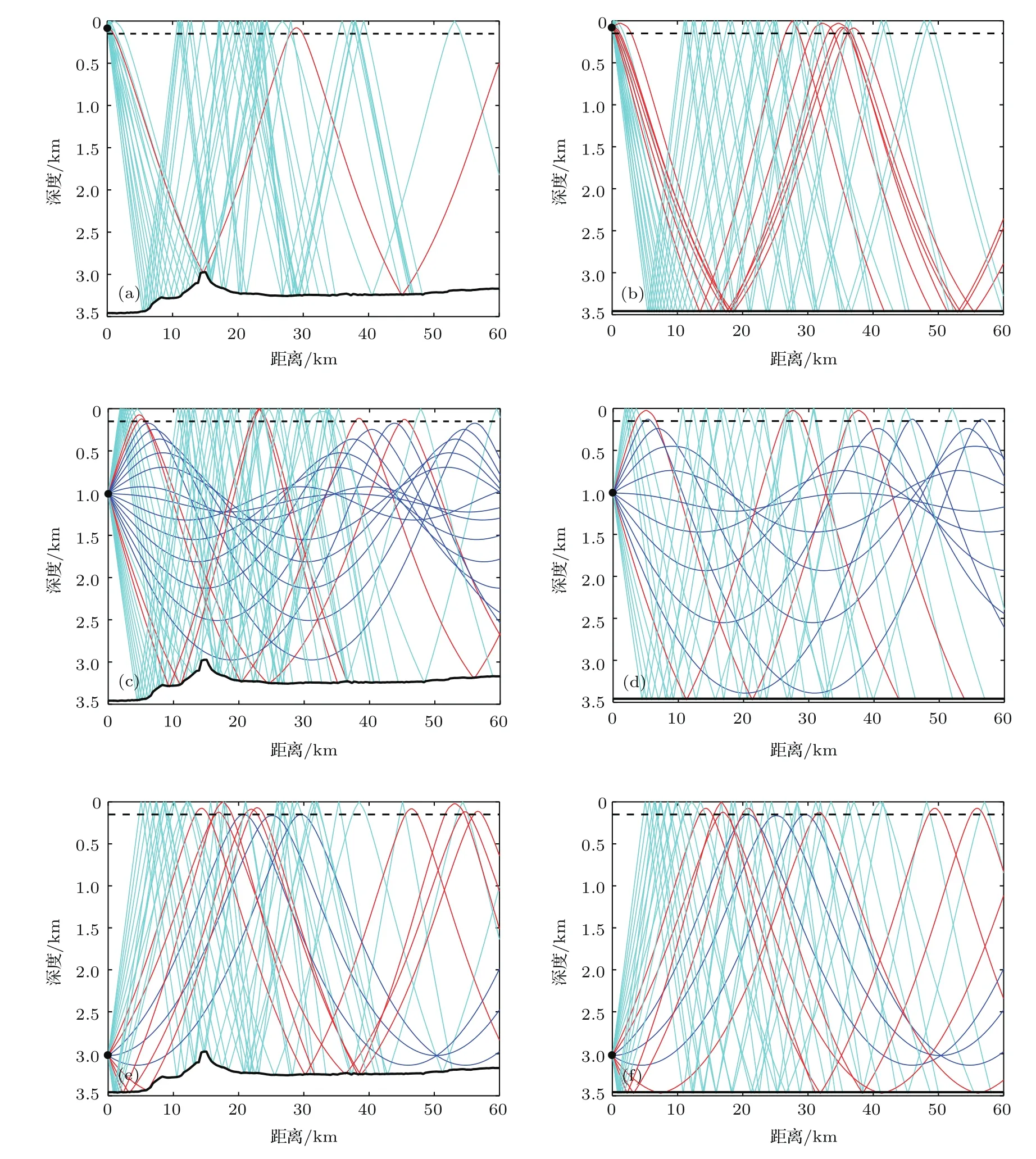
图9 三个不同声源深度对应的声线图 (a)实测海底声线,声源深度85 m;(b)平坦海底声线,声源深度85 m;(c)实测海底声线,声源深度1008 m;(d)平坦海底声线,声源深度1008 m;(e)实测海底声线,声源深度3021 m;(f)平坦海底声线,声源深度3021 mFig.9.Comparison of rays traces for different bathymetries at three source depths:(a)The real bathymetry and the source depth at 85 m;(b)the flat bottom and the source depth at 85 m;(c)the real bathymetry and the source depth at 1008 m;(d)the flat bottom and the source depth at 1008 m;(e)the real bathymetry and the source depth at 3021 m;(f)the flat bottom and the source depth at 3021 m.
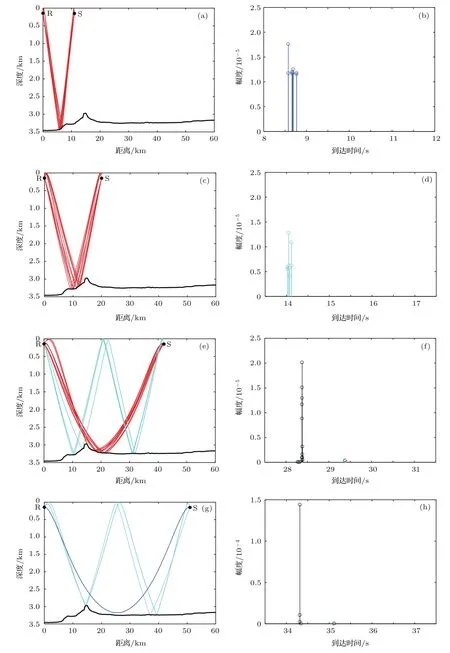
图10 四个不同距离处的本征声线和时间到达结构 (a)和(b)表示11 km声源的本征声线和到达结构;(c)和(d)表示20 km声源的本征声线和到达结构;(e)和(f)表示42 km声源的本征声线和到达结构;(g)和(h)表示51 km声源的本征声线和到达结构Fig.10.Comparison of the eigenrays and arrivals at four different ranges,where(a)and(b)for the source range at 11 km,(c)and(d)for the source range at 20 km,(e)and(f)for the source range at 42 km,(g)and(h)for the source range at 51 km.
为了进一步研究分析距离在20,40 km处两个海底反射会聚区以及11,51 km处两个声强较高区域实验的声传播损失变化特性,计算了声源位于这四个距离附近处的S点的本征声线及对应的时间到达结构,其中接收点R深度为145 m.结果如图10所示,其中:时间到达结构中黑色线表示声线掠射角小于10◦,蓝绿色线表示掠射角在10◦—20◦内的时间到达结构,其他掠射角度的到达结构用蓝色表示.
由图10可见,在11 km处声线只经过一次海底反射到达,能量损失较小,可以形成声强较高的区域,但是该区域内只有大掠射角的声线到达,多途到达产生的时间展宽相对20 km处较大;在20 km处,由于海底小山对第一海底反射会聚区的形成有较大影响,大量声线与海底小山的斜坡面发生相互作用,经过一次海底反射到达接收处.第二海底反射会聚区的声线有两次较为集中的到达,一部分小掠射角的声线经过一次海底反射,另一部分大掠射角的声线到达第一会聚区后再次经过海底反射到达42 km处,但是第二次到达的声压幅度相对较低.对比图10(d)和图10(f)发现,与第一海底反射会聚区相比,第二海底反射会聚区内一次海底反射到达声线的幅值更高,因为第二海底反射会聚区到达声线入射海底时的掠射角小于第一会聚区,海底反射损失的声能量相对更低,而且有部分来自两次海底反射声线的贡献,因此图7(b)的实验传播损失中观察到第二会聚区相比第一会聚区有更高的增益,而且第二会聚区多途结构更明显.在51 km处,声线经过两次海底反射到达接收位置,大量的声能量在与海底、海面的相互作用中衰减掉,只有极少数小掠射角的声线只经过水体折射到达接收位置,因此51 km声增强区域内的增益小于前面的两次海底反射会聚区.
对比图9中平坦海底地形和实测海底地形条件下的声线图,海底小山的存在对海底反射会聚区的提前形成具有重要的贡献.为了分析海底小山丘对于会聚区形成的具体影响,图11给出了在第一反射会聚区内(20 km)四个不同接收深度处(85,406,1008,和3021 m)的本征声线、时间到达结构及实验测量的时域脉冲到达结构,可见四个深度上理论计算的时间到达结构与实验结果较符合.随着接收深度的增加,第一会聚区内到达接收点的声线与海底相互作用的范围增大,声线到达的路径趋于复杂.在较浅的两个接收深度上,仅有一次海底反射的声线到达接收点,1008 m接收深度上的到达声线包含一次海底反射和两次海底反射声线,其中一次海底反射声线分两次集中到达,多途结构相对复杂.在接近海底的3021 m接收深度上,除了海底反射声线,还有直达声线到达接收点.直达声线的能量损失较小,其幅值远大于其他路径到达声线,也大于其他接收深度,因此20 km海底附近的传播损失小于其他深度.
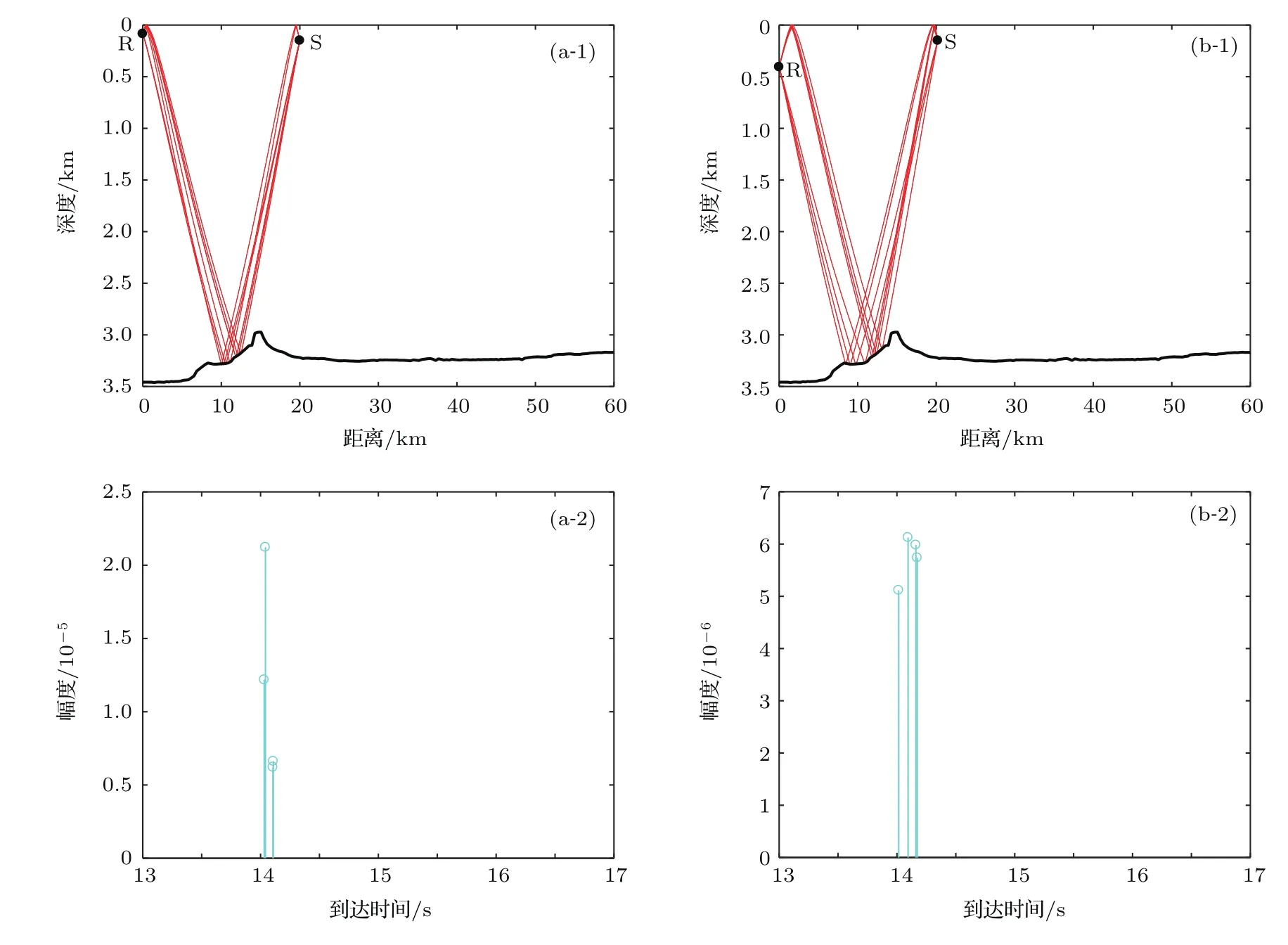
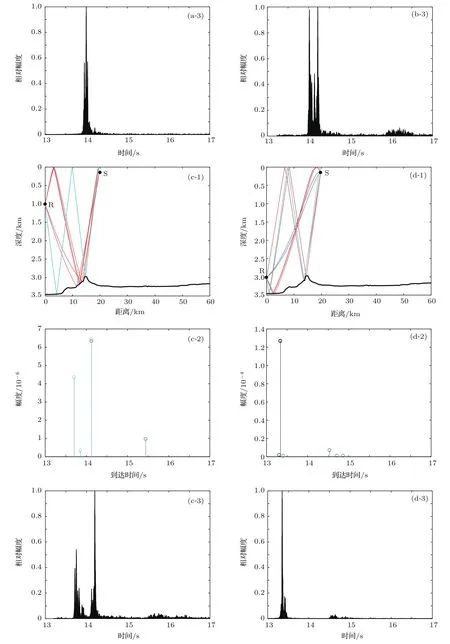
图11 第一海底反射会聚区不同接收深度本征声线和时间到达结构比较 (a)85 m接收深度;(b)406 m接收深度;(c)1008 m接收深度;(d)3021 m接收深度Fig.11.Comparison of eigenrays and arrivals at different receiver depths in the first bottom re flection convergence zone:(a)The receiver depth at 85 m;(b)the receiver depth at 406 m;(c)the receiver depth at 1008 m;(d)for the receiver depth of 3021 m.
4 总 结
本文利用2018年4月南海声传播实验数据以及同步海洋环境资料,对深海海底反射会聚区声传播特性进行了研究.基于抛物方程数值分析结合射线理论对实验现象进行分析,很好地解释了水平变化的海底地形环境下海底反射会聚区形成的机理.结果表明:直达声覆盖距离范围内的海底地形变化对海底反射会聚区的形成及传播特性具有很大的影响,在20和40 km距离附近形成两个明显的海底反射会聚区结构,其增益达10 dB.由于海底地形随距离逐渐变浅,破坏了水平不变深海环境下原有的会聚区结构,折射到达的声线路径变小,使得对应距离下的声场能量小于海底反射会聚区.当声源深度与接收深度都处于相对较浅的相同深度时,随着一次海底反射声线海底反射能量损失的减小以及到达声线数量的增加,第二会聚区的增益高于第一会聚区.在第一反射会聚区内,随着接收深度的增加,声线到达的路径逐渐增加,声线到达结构趋于复杂,多途效应更加明显.此外,由于海底小山的反射作用,大角度声线经海底反射导致部分深度上的海底反射会聚区可提前到11 km.研究结果为声纳在深海复杂地形下的应用及性能环境效应分析具有重要借鉴意义.
感谢参与2018年春季南中国海声传播实验的全体工作人员,是他们的辛勤劳动为本文提供了可靠的实验数据.
猜你喜欢
鸭绿江(2022年10期)2022-10-21
噪声与振动控制(2022年5期)2022-10-21
舰船科学技术(2022年11期)2022-07-15
导弹与航天运载技术(2022年2期)2022-05-09
指挥控制与仿真(2021年4期)2021-08-26
兵工学报(2021年2期)2021-04-08
电子制作(2019年23期)2019-02-23
舰船电子工程(2018年11期)2018-11-26
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
优雅(2017年3期)2017-03-09
