
基于单轴地磁传感器的车辆参数检测算法研究*
2019-01-21 11:45张伟斌李千目
交通信息与安全 2018年6期
吕 鲜 戚 湧▲ 张伟斌 李千目
(1.南京理工大学计算机科学与工程学院 南京 210094;2.南京理工大学电子工程与光电技术学院 南京 210094)
0 引 言
在智能交通研究中,车辆检测是其中重要的基础环节。目前,车辆检测的主要设备有感应线圈检测器(ILD)、视频摄像机以及地磁传感器。其中,ILD因其技术简单,成本低而使用最为广泛但ILD的车辆检测灵敏度低,抗外界干扰性差,应用于车辆感知时准确率较低。视频摄像机使用图像处理技术分析车辆的车牌号或车辆形状来感知车辆以及进行车型分类,车辆检测精度高,但成本高昂,还易受光线和恶劣天气的影响,只应用在重要的交通路口。地磁传感器是通过检测车辆对地磁场产生的干扰来感知车辆,由于其耗电量低,检测灵敏度高,体积小巧,安装方便,不受恶劣环境的影响,定期维护简单,可使用周期较长,近年来得到广泛的应用。
目前,低功耗、低成本、灵敏度高的地磁传感器是车辆检测领域的研究热点。李希胜等[1]研发了1种由3轴AMR传感器和信号处理电路组成的车辆检测器,被用以测量车辆经过检测区域时引起周围磁场的变化,该检测器可以实现车辆感知。苏东海等[2]提出了1种基于AMR传感器的交通流信息采集方法,使用2个地磁传感器,对采集的数据进行预处理以及波形特征提取,并应用基于阈值的车辆判别方法进行了实时统计车流量的实验。柴可夫等[3]提出了一种基于PLA时间序列重现的车辆实时检测算法,算法减少低速行驶的大型车辆对检测结果的影响。闻育等[4]提出了一种基于磁偏角的车辆检测方法,其通过测量车辆对磁偏角的扰动大小来获取车辆信息,并设计了基于状态机算法的车辆检测技术并验证了此种算法的有效性。李云龙等[5]利用单个3轴AMR传感器测量行驶车辆引起地球磁场变化的磁场强度值,并研究AMR检测器的数据采集原理和波形特征向量提取方法,设计了一种自适应状态机车辆检测算法,即自适应地更新阈值和基准值。Yang 等[6]利用单个3轴的AMR传感器采集地磁信号,采用数字滤波器进行噪声处理,设计基于信号方差的固定阈值算法检测城市道路中低速拥堵条件下的车辆,通过提取波形特征进行车型识别。李海舰等[7]使用1种多功能的地磁传感器采集车辆经过时的磁场数据,先分析噪声数据的频率分布,然后采用低通滤波器去除噪声,设计1种双窗口车辆检测算法感知车辆,最后采用8种与车速不相关的波形时域特征进行车型分类。
综上,现有文献大多数集中在利用单个地磁传感器进行车辆检测的研究,并且传感器输出的地磁信号数据包含无车通过时的背景噪声数据,需要后期的数据处理提取有车辆经过地磁节点的信号数据。因此,这类持续输出信号数据的地磁传感器功耗大,并且利用单个地磁获取的车辆信息有限,车辆检测存在误差。笔者基于自主研发的单轴地磁传感器,研究了基于固定阈值的状态机算法,利用2个地磁传感器实现车辆的准确检测,并提出感知车流量、车速、车长等交通信息的方法,最后根据收集到的地磁数据,探索分析磁场能量与车速、车长的相关性,并建立相应的模型。
1 基于地磁传感器的车辆检测
1.1 基本原理
地球本身具有一个较弱的天然磁场,称为地磁场。在没有外界干扰的条件下,一定区域内的地球磁场强度基本上恒定不变,但当有铁磁物体接近时,该区域的磁场瞬间发生变化。此时地磁传感器能够测量连续变化的磁场信号,并根据变化幅度来判断是否有铁磁物体通过此区域。汽车也是一种铁磁物体,地磁传感器通过感知车辆通过检测区域前后磁场的改变,进行车辆实时检测,见图1。

图1 地磁检测车辆原理示意图Fig.1 The principle of geomagnetic detection vehicle
1.2 自主研发的地磁传感器
自主研发的单轴地磁传感器主要包括磁阻芯片模块、控制模块和通信模块,见图2。其中磁阻芯片可以测量其所处位置垂直方向z轴和水平方向2轴x,y的磁场,但当车辆经过传感器节点时,z轴的磁场变化最明显,获取的多个传感器节点的z轴磁场信号变化幅度大于阈值的磁场数据,经过后期处理,既可完成行驶车辆的检测和车速、车长等交通信息的感知,又可减少单次传输量,节约通信开销。

图2 自主研发的地磁传感器Fig.2 Self-developed geomagnetic sensor
传感器节点检测车辆的具体工作流程如下:当没有车辆穿过地磁检测区域时,传感器处于一种休眠状态;当外界磁场强度突然发生变化并且变化幅度大于所设定的阈值时,此时传感器进入工作状态,开始传输当前时刻的磁场信号;当检测到外界磁场强度的变化幅度小于所设定的阈值时,传感器停止传输磁场信号,重新进入休眠状态。
1.3 车辆检测系统结构
在道路的同一车道上布置相隔一定距离的地磁传感器,传感器将行驶车辆引起地球磁场的扰动转变成电压信号,电压信号经过模数转换后变成数字信号,将数字信号调节放大,并通过通信模块将数据传输给上位机程序,程序对所采集的数据进行预处理,包括原始数据的噪声去除。其次,利用固定阈值的状态机算法进行车辆检测,并分离出车辆的地磁数据。最后,分析地磁数据,设计算法获取车长、车速、车流量等车辆参数信息,以及分析这些车辆参数的相关性,见图3。
2 数据预处理
传统地磁传感器输出的信号是包括背景噪声在内的地磁信号。 当没有车辆经过时,传感器依旧输出当前时刻的磁场强度,即背景噪声。此类地磁传感器处于持续工作的状态,并且收集的数据需要去除背景噪声进而从中提取车辆经过检测区域的磁场信号。文中提出了一种全新的单轴地磁传感器检测车辆理念:传感器周期性地检测外界磁场,当车辆未进入或者离开检测区域时,检测到的磁场强度是一个平稳的值,此时传感器并不传输地磁信号,处于一种休眠状态;当有车辆进入到检测区域时,地磁场将会发生剧烈抖动,若传感器检测到的磁场抖动幅度大于所设定的阈值时,此时传感器才处理地磁信号。所以,传感器只处理车辆经过检测区域时z轴的地磁信号,并不记录x轴和y轴的地磁信号以及外部环境的背景噪声,这样既便于数据传输,节省传感器的工作功耗,也利于后期的数据处理和分析。表1是车辆经过地磁检测区域时所采集的部分原始数据。
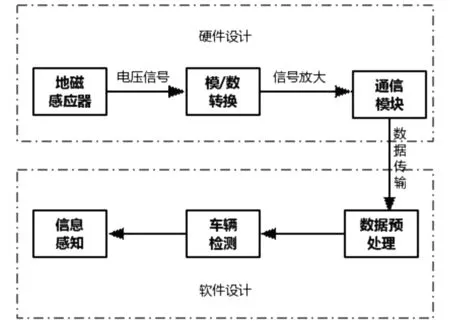
图3 车辆检测系统结构Fig.3 Diagram of the structure of vehicle deterction system

表1 部分原始数据Tab.1 Partial raw data
假设地磁传感器检测的最原始的磁场强度为
Zo={Zo(1),Zo(2),…,Zo(4i+k),…}
(i=0.1,…,N;k=1,2,3,4)
(1)
传感器传输的磁场强度为
Z={Z(1),(2),…,Z(j),…,Z(n)}
(j=1,2,…,n)
(2)
对应的时间为
t={t(1),t(2),…,t(j)…,t(n)}
(j=1,2,…,n)
(3)

(4)
图4是1辆汽车先后经过地磁节点A,B时的磁场强度波形图。
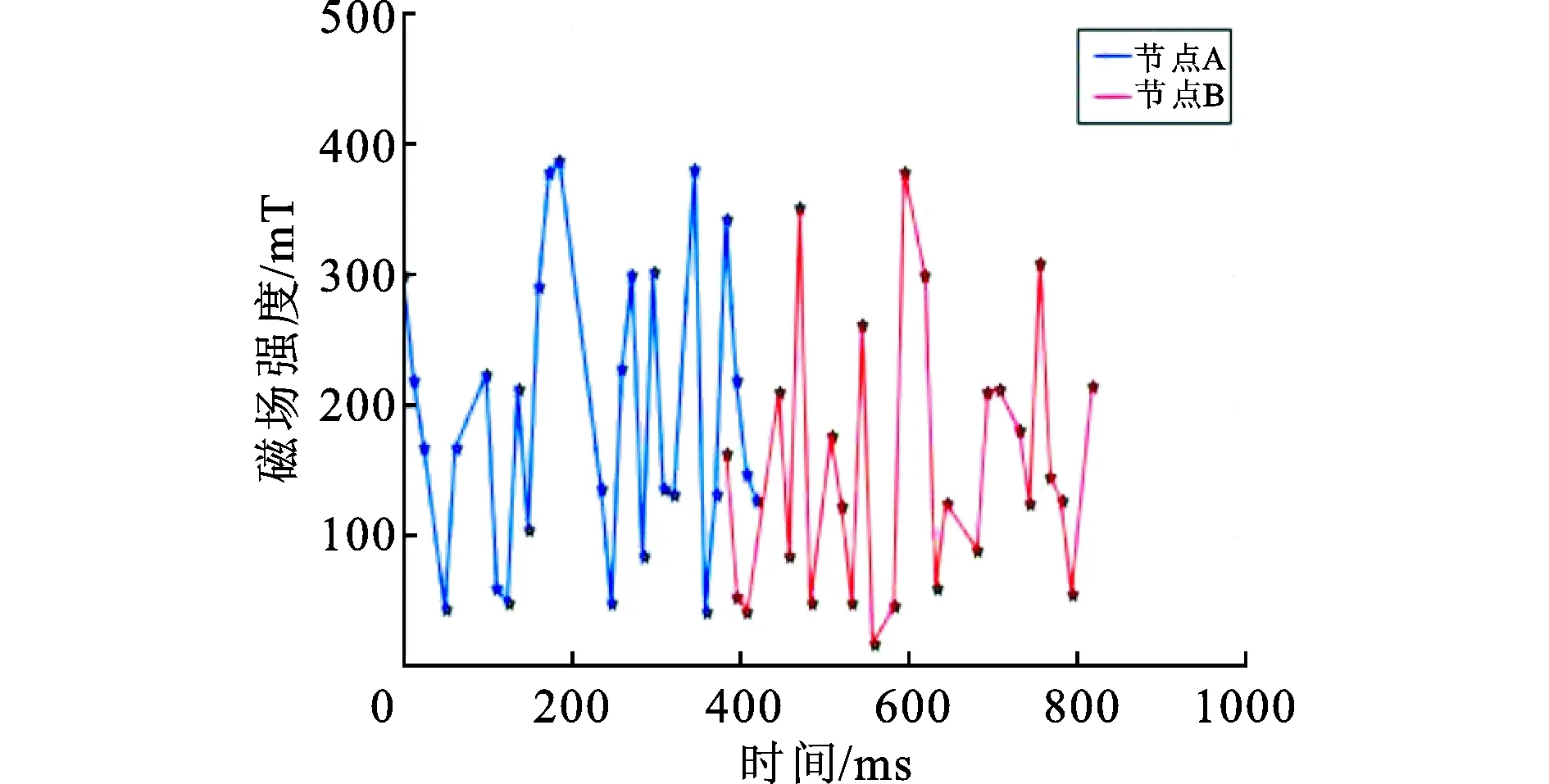
图4 双地磁检测车辆磁场强度图Fig.4 Double geomagnetic detection vehicle waveform diagram
3 车辆检测与交通信息感知方法
3.1 基于状态机的车辆检测算法
本文根据自主研发的单轴地磁传感器,提出基于固定阈值的状态机算法,算法描述见图5。

图5 状态机算法Fig.5 State machine algorithm
该车辆检测算法是根据车辆进入检测区域时引起地球磁场产生剧烈的抖动,根据抖动幅度大于指定的阈值Td1,并且持续抖动的时间超过时间阈值Td2,则认为检测到车辆。
决定状态机跳变的因素flag定义如下
flag=
(5)
抖动幅度阈值Td1的确定是根据多次实验预先设定的一个固定阈值。
时间阈值Td2的确定依据为
(6)
式中:Lmin为道路行驶的最小型汽车的长度;Vmax为道路的最高限速;f为传感器的工作频率。即所有检测到的车辆经过2个地磁节点的时间不小于路面最小型汽车以最快速度通过2节点的时间。
状态机算法中其他变量的解释:duration_t表示车辆进入地磁结点后的计时标记,默认值为0;vehicle_count表示车辆计数器,默认值为0。
基于固定阈值的状态机描述如下:
在初始状态时,将所有的变量重置为默认值,状态机到达未触发状态,重置duration_t为默认值0,此时循环判断flag的值,若flag为默认值0,状态机维持现状;若flag的值变为1,则状态机转变为半触发状态,此时可能有车辆通过,将车辆进入地磁检测区域的计时标记duration_t自增1,每隔一个固定时间段判断flag的值,若flag的值未发生改变,duration_t加1,直到flag的值变为0,将duration_t与预先设定的时间阈值Td2进行比较,若duration_t小于Td2,则收集的地磁信号是由附近车道的车辆引起,此信号是噪声,并将状态机恢复到未触发状态,继续检测后续车辆;若duration_t不小于Td2,则检测的车辆离开,并且车辆计数器vehicle_count自增1,状态机转变未触发状态,等候检测下一辆车。因此,基于固定阈值的状态机算法可以检测有效路段车辆,并且利用vehicle_count可统计指定时间段内的交通流量。
3.2 车速计算方法
地磁传感器不仅可以实时检测车辆,统计路段车流量,还可以利用2个间隔一定距离的地磁节点对行驶车辆速度的测量。如图6所示,在同一车道前后埋设相距L(L较小)的2个信号频率和检测半径相同的地磁节点A,B。当车辆经过这两个地磁节点时,由于节点间的距离较小,可认为车辆匀速通过。利用车辆检测算法获取车辆通过地磁节点A,B的时间分别为tAarr,tAlea和tBarr,tBlea。

图6 车速测量节点布置示意图Fig.6 Layout diagram of speed measurement node
(7)
3.3 车长估算方法
与车辆长度相比,地磁检测半径非常小,可将其视为一个点。车辆从进入节点A到离开所花费的时间为tAlea-tAarr。同理,进入节点B到离开所花费的时间为tBlea-tBarr,车辆长度为
lea1=(tBlea-tBarr)V
(8)
lea12=(tBlea-tBarr)V
(9)
3.4 参数模型关系
3.4.1 参数模型分析
基于一种全新的单轴地磁传感器检测车辆理念收集到磁场数据并绘制出的地磁信号曲线图,由于地球磁场和路面环境的复杂性,以及道路行驶车辆种类众多,新旧不一,车辆自身可能携带铁磁物质等因素,提取的信号波形特征无法与车辆的类型建立对应关系。此外,同一车型的车辆以不同的车速经过地磁节点,车辆对应的地磁信号曲线长度不一致,不同车型的车辆以同一车速经过时,地磁信号曲线长度也不一致。如果对地磁曲线进行归一化处理会损失原本的地磁信号(见图7)。因此,文中从另外一个角度探究磁场强度Z、磁场能量E与车长L、车速V的关系。

图7 同类型车辆的磁场曲线图Fig.7 Magnetic field curve of the same type of vehicle
磁场能量为
(j=1,2,…,n)

图8 平均磁场强度与车速的关系图Fig.8 Average magnetic field intensity vs. vehicle speed

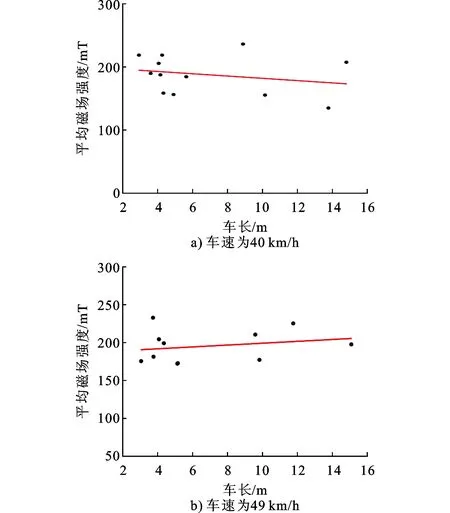
图9 平均磁场强度与车长的关系图Fig.9 Average magnetic field intensity vs. vehicle length
其次,分析磁场能量E与车速V、车长L的关系,如图10~11所示。

图10 磁场能量与车速的关系图Fig.10 Magnetic field energy vs. vehicle speed

图11 磁场能量与车长的关系图Fig.11 Magnetic field energy vs. vehicle length
由图10~11可知,当车辆通过地磁节点时,行驶的速度越快,产生的地磁能量越小,地磁能量与车速是负相关关系;车辆长度越长,产生的地磁能量越大,地磁能量与车长是正相关关系。基于此规律,进一步探究磁场能量与车长、车速比值之间的关系,并通过地磁节点B收集到的数据进行验证。图12所示的是车辆经过地磁节点A时,磁场能量与车长车速比值之间的关系,图13所示的是车辆经过节点B,磁场能量与车长、车速比值之间的关系,这两幅图都显示了磁场能量与车长、车速比值有线性关系。
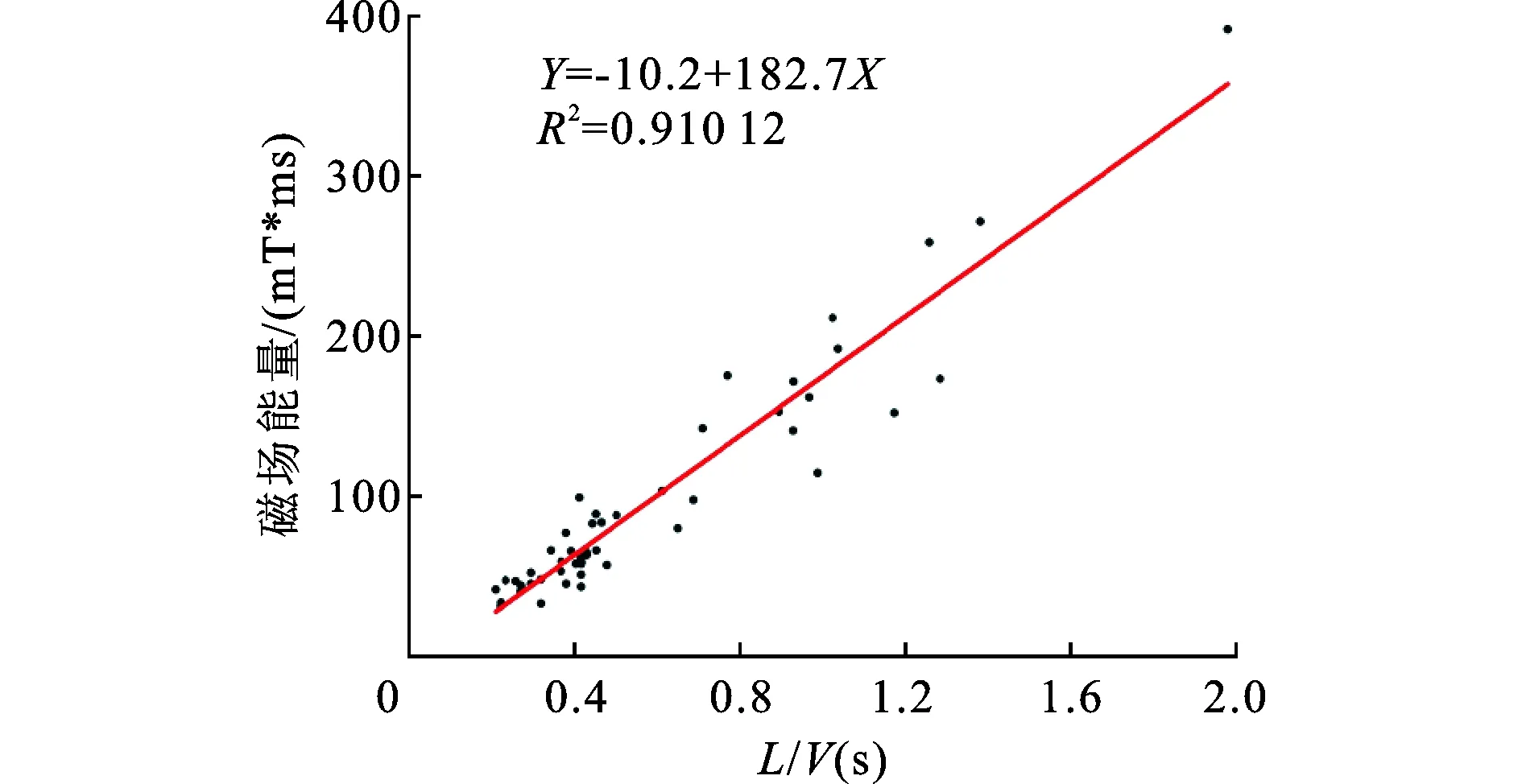
图12 地磁节点A磁场能量和车长、车速比值之间的关系Fig.12 Magnetic field energy of node A vs. the ratio of vehicle speed and length

图13 地磁节点B磁场能量和车长车速比值之间的关系Fig.13 Magnetic field energy of node B vs. the ratio of vehicle speed and length
3.4.2 模型用途
图12~13显示出地磁能量E与车长、车速比值L/V是线性关系,即E=a(L/V)+b(a,b均为参数)(表2)。此线性模型可用于多个传感器的数据融合:当地磁传感器测量的速度有较大的误差时,通过将准确的车长数据代入到三者之间的表达式中,可以对速度进行校验;同理,当车长估算有误差,可以利用准确的车速数据对车长进行校正。
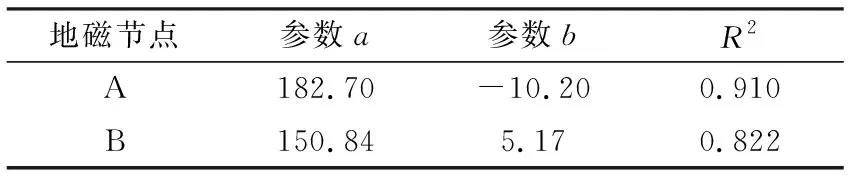
表2 参数列表Tab.2 List of parameters for a linear relationship
4 实验验证
在南京市江宁区某公路上,将编号分别为A(05)和B(02)的2个地磁传感器相距5 m布置在一个车道上,实验收集大约6 h的行驶车辆数据。为了后期验证传感器检测车辆算法的准确性,用摄像机记录车辆经过传感器的全过程。
根据中国汽车分类标准,实验中将路段行驶的车辆分为4种:4 m以下为小型车,标记类别1;4~7 m为中型车,标记类别2;7~11 m为大型车,标记类别3;11 m以上为特型车,标记类别4。车型的判别直接根据双地磁计算的车长判断。实验结果如表3所示:

表3 实验结果Tab.3 Experimental results
现场实验时,当有车辆经过地磁检测区域时,地磁传感器立即传输磁场数据,并交付给上位机程序处理,而当无车或者车辆离开后,传感器没有传输磁场数据。实验过程视频中一共出现150辆车,基于固定阈值的状态机算法检测到147辆车,通过相关计算获取到车辆的车速、车长、车型等车辆信息。由此可以得到,基于自主研发的单轴地磁传感器可以实现98%的车辆检测。表3数据显示,第4辆车的车长为3.23 m,查阅视频可知,该车为一辆低速行驶的出租车,车速为25.9 km/h,与事实相符合;第6辆车的车长为2.33 m,在视频中出现的是一辆三轮车,而且该车只经过地磁节点A,然后偏离了原先的车道,此处检测到的数据是噪声,因此,车速计算有误差。
根据2个地磁传感器测量的车速,与视频获取的行驶车速进行对比,两者获取的车速基本一致,而且,根据算法计算得到的车长进行车型判别也与视频中出现的车型一致。
5 结束语
本文首先采用自主研发的单轴地磁传感器,与文献[11]需要动态更改基值并设计复杂的检测波形算法提取车辆磁场波形相比,文中的传感器只处理车辆引起地磁场扰动的幅度大于指定阈值的磁场信号,通信开销更低,后期数据处理更加高效。其次,本文提出了一种固定阈值的状态机车辆检测算法,算法的输入值维度更低,并且通过设立多个状态,可以有效过滤附近车道车辆的地磁扰动噪声,利用前后2个地磁传感器可以实现了与文献[11]同样的车辆检测率以及车速、车长、车流量的感知,但本文的算法效率更高。最后探索发现了地磁能量与车长车速比值的关系模型,此模型在其它地磁传感器的车辆检测研究中很少提及,后期可用于多个地磁传感器的数据融合。
现场实验只使用2个地磁传感器收集数据,后期可组建无线传感器网络将多组传感器布置在多个车道上来感知一个断面甚至一个路网的车辆信息,并利用文中建立的磁场能量与车速车长比值的线性关系对这些传感器获取的数据进行融合和校验,进行更加深入的研究。
猜你喜欢
北京航空航天大学学报(2019年9期)2019-10-26
现代计算机(2018年30期)2018-11-20
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
小小说大世界(2017年4期)2017-04-06
汽车维护与修理(2015年5期)2015-02-28
人民交通(2014年12期)2014-04-27
空间控制技术与应用(2010年5期)2010-12-23
现代电子技术(2009年14期)2009-09-05
