无人机倾斜摄影测量在矿山地质中的应用研究
2019-01-19 06:12朱磊
装饰装修天地 2019年24期
关键词:应用
朱磊
摘 要:中国是矿产大国,矿物种类多,分布广,开采及治理水平参差不齐。处理不当会引起资源浪费、环境污染等问题,甚至导致地质灾害,威胁生命财产安全。为了监督合理开发,检查私挖乱采,保护环境杜绝灾害的发生,需要摸清中国现阶段矿山地质情况,类如计算储量、定边定界等工作成为重中之重。矿山地质测量无疑为该项工作提供了基础数据保障。
关键词:无人机倾斜摄影测量;矿山地质;应用
1 倾斜摄影测量
1.1 定位原理
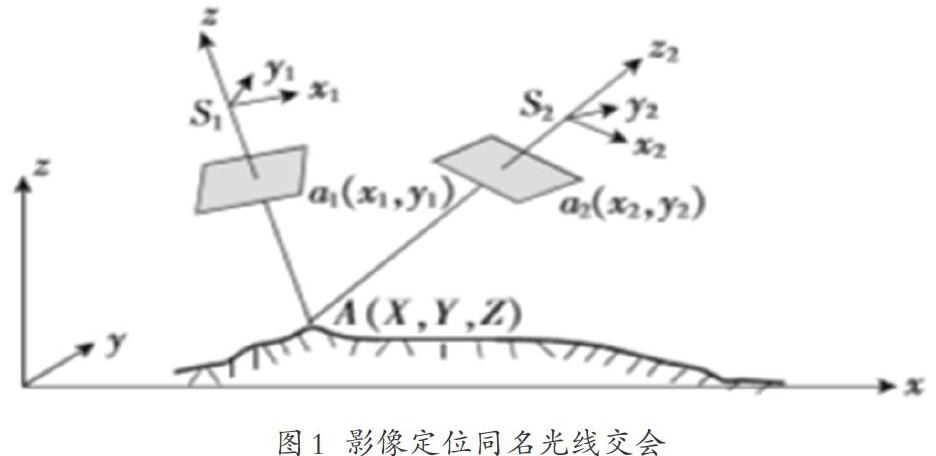
众所周知,测量的本质是定位,定位的本质是获取坐标。传统测量通过人工定位,直接接触目标获取坐标;而摄影测量则通过影像定位、同名光线交会计算坐标。使光线交会则需要满足一定条件,如图1所示。图中,A为物方点,a1、a2为物方点投影在两个像片上的像点,S1、S2为两个像片的摄影中心。从图1可以看出,想要通过光线交汇完成定位,需要知道像片的实时姿态,即恢复外方位元素Xs、Ys、Zs、φ、ω、κ(Xs、Ys、Zs为线元素,φ、ω、κ为角元素)6个参数,且须知内方位元素x0、y0、f的数值。
1.2 优势提升
(1)定位精度。众所周知,测量数据都存在误差,在必要观测条件下无法对误差进行消除和减弱,因此需要进行多余观测,倾斜摄影测量在相同条件下的数据量是竖直摄影的2~5倍,大大增加了多余观测,提高了精度。另外,阿贝比长原理规定:量测长度时尺子与目标平行则结果最优,角度越大则误差越大。而对摄影测量而言,O1、O2为两个不同角度的摄影中心,其摄影基线与目标越接近平行即光轴与目标尽可能垂直,则测量精度越高。传统摄影测量只从竖直方向观测,其基线平行于XY平面,因此该模式下的目标在XY方向精度最高,而与XZ、YZ平面角度过大使在Z方向的精度成为传统摄影的短板。倾斜摄影测量增加了大角度影像观测,其摄影基线与XZ、YZ平面的夹角大幅度减小,对某些特殊侧面甚至接近平行,由此不仅提高了Z方向精度,而且进一步减小了X、Y方向的误差。同时多方位的拍摄更好地获取了目标侧面的纹理,实现了不同角度信息的互补,对轮廓的还原效果更优。
(2)成果质量。传统竖直摄影测量生成的基本都是二维平面数据,分析起来较为困难,对技术经验要求较高,某些盲區还需要后期现场补测调绘。而倾斜摄影测量的成果以三维模型为主,在高精度的数字表面模型DSM基础上进行纹理映射,直观性强,使用者能够方便地在模型上对矿山地质的剖面、沟坎、坡向线进行分析,对不同种类的区域例如采矿区、找矿区、废弃物堆积区等区域的判读率也提高了很多,此外还可以在模型上绘制传统竖直摄影测量生成的数据成果。因此,倾斜摄影测量为从业者提供了更加全面的基础数据。
1.3 技术流程
1.3.1 外业采集
由于建模对精细度要求很高,而旋翼机较固定翼飞行高度低,速度慢,能够很好地拍摄目标纹理,因此在飞行平台的选取上以旋翼机为主。相机应搭载多镜头,即1个下视镜头和数个倾斜镜头,通常以5镜头为主。根据测区地形规划航线,重叠度应在70%以上,分辨率应设定在5cm以内,并以此定义航高。若测区面积较大,单个架次无法完成时,应当在架次之间保留1~2条航线的重叠,以便后期能准确拼接。设定完毕后,飞机按航线飞行进行拍摄,其后检查像片是否有大量曝光、云烟遮挡现象,有无漏拍、序号与POS信息是否对应等情况,合格后便可进行下一步的处理。
1.3.2 内业处理
由于现今倾斜相机还不能计算自身POS,只有下视镜头具有位置姿态信息,因此只能通过下视镜头和倾斜镜头的位置关系计算所有像片。将像片加载进相关建模软件,分别进行空中三角测量(简称空三)、点云匹配、DSM生成、表面重建、纹理映射等,生成最终的三维立体模型。同时,在该模型基础上,利用第3方软件,生成传统竖直摄影常出的数字正射影像DOM和数字线划图DLG,可谓是一模多用。
2 实践操作
2.1 测区概况
本次实验测区选在某石料矿区,欲通过后期所测数据,圈定目标区域矿界、了解开采情况、描绘实地地形以及后期合理规划等。该矿区范围为东经112.60~112.62°,北纬38.17~38.18°,面积约1km2。测区内以山地为主,海拔多在1100m~1400m,相对高差100m~400m,且部分遮挡较多,传统竖直摄影测量无法完全覆盖拍摄,故采用倾斜摄影方法采集数据。
2.2 处理流程
2.2.1 飞行平台及相机
本次飞行平台选用哈瓦MEGA-V8Ⅱ旋翼无人机,该飞机采用全碳纤维材料一体成型技术、配合航空专用镁合金、钛合金等尖端材料和工业级传感器芯片技术,机身826mm×1050mm×578mm,最大起飞重量12kg,飞行半径可达14km,续航时间30min,抗风能力达到7级,且具有后差分解算系统。该平台搭载的相机是定做的HARWAR-YT-5POPCⅢ5镜头倾斜航摄仪,其中1个下视镜头,4个倾斜镜头,倾角为45°,像素达到1亿级,该相机5个镜头同时曝光,曝光时间为1/4000s,最小曝光间隔为2s。
2.2.2 控制点布设及航线规划
测区内山地较多,地形条件差,大部分区域人工无法到达,因此选择较为平缓的地方布设像控点,以便将模型纳入到目标坐标系下,并且起到精确的控制作用。由于飞机自带后差分解算系统,一定程度上精化了POS数据,故能够保证测量精度满足要求。飞行时间段选在上午十一点左右,期间光照适中。为了防止出现漏拍等信息不完整的情况、保证模型精细程度,本次地面采集分辨率设定为5cm,相对飞行高度相应为250m,航向重叠度设置为80%、旁向重叠度设为75%,航线为南北方向,共分2个架次,架次之间有2条航线的重叠区,以便后期拼接。本次飞行有50条航线,共计3700张像片,POS数据完整,影像质量正常。
2.2.3 内业处理
(1)空中三角测量。空三是恢复像片实时位置和姿态的过程,恢复了位置姿态,就能通过影像进行定位,因此空三是整个过程中决定精度的环节,可以说是重中之重。先导入所有像片,加载相应POS文件后提交空三。软件以其强大的倾斜影像匹配算法,准确找出各个像片间的同名点,完成相对定向,并通过刺像控点、平差计算,得出最终的坐标信息。空三结束后,整体的精度也就确定了。
(2)模型重建。空三后进行模型重建。点击重建以后,软件首先通过恢复姿态的多个影像同名光线相交,得出物方密集点云;然后在密集点云基础上建立不规则三角网,形成一个个面片,完成表面重建;最后通过泊松融合方法将像素赋予所形成的面片,使复杂的图形场景呈现出真实感。
参考文献:
[1] 方忠平.基于无人机倾斜摄影测量技术的三维建模和精度分析[J].工程建设与设计,2019(10):247.
猜你喜欢
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
科技视界(2016年21期)2016-10-17
考试周刊(2016年76期)2016-10-09
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29