基于模糊干扰观测器的电液伺服位置系统自适应反步控制
2019-01-17 06:14刘乐蔺明浩李晓刚方一鸣
电机与控制学报 2019年12期
刘乐 蔺明浩 李晓刚 方一鸣

摘要:针对具有输入饱和的非对称缸电液伺服系统的位置跟踪控制问题,本文提出一种基于模糊干扰观测器的自适应动态面反步控制方法。首先,为便于系统控制器的设计,将系统模型等价转化为严格的反馈形式,并考虑了伺服阀控制信号存在的输入饱和问题;其次,通过构造模糊干扰观测器对系统中由参数摄动、负载扰动等构成的复合干扰进行了观测估计;再次,将反步控制与动态面控制相结合完成了非对称缸电液伺服位置系统控制器的设计,有效地增强了系统的鲁棒稳定性,并解决了反步控制中的“计算膨胀”问题;稳定性分析结果表明,闭环系统的所有信号均一致最终有界。最后,基于某650 mm冷带轧机电液伺服系统的实际数据进行了仿真对比研究,仿真结果验证了本文所提方法的有效性。
关键词:电液伺服位置系统;非对称缸;输入饱和;模糊干扰观测器;动态面控制;自适应反步控制
DOI:10.15938/j.emc.(编辑填写)
中图分类号:TP273文献标志码:A文章编号:1007-449X(2016)00-0000-00(编辑填写)
Abstract:For the position tracking control problem of electro-hydraulic servo system of asymmetric cylinder with input saturation, an adaptive dynamic surface backstepping control strategy is proposed based on the fuzzy disturbance observers. Firstly, to facilitate the design of system controller, the system model was transformed into a strict feedback formequivalently, and the input saturation problem of servo valve's control signal was also considered. Secondly, the compound disturbances, which are composed of parameters perturbation, load disturbance and so on, were estimated by constructing the fuzzy disturbance observers. Thirdly, the controller for the electro-hydraulic servo position system of asymmetric cylinder was designed by combining the backstepping control with the dynamic surface control, which enhanced the robust stability of the system, and solved the “calculation inflation” problem during using the backstepping control effectively. Stability analysis showed that all signals of the closed loop system are uniformly ultimately bounded. Finally, simulation comparative research was conducted by using the actual data of a 650 mm cold strip rolling mill's electro-hydraulic servo system, and simulation results verified the effectiveness of the proposed control strategy.
Keywords: electro-hydraulic servo position system; asymmetric cylinder; input saturation; fuzzy disturbance observer; dynamic surface control; adaptive backstepping control
0 引言
电液伺服系统具有响应速度快、承载能力强、控制精度高等优点,在工农业、国防军工、航空航天等领域有着广泛应用[1 - 3]。然而在实际应用中,电液伺服系统的许多参数,如流量系数、泄漏系数等存在摄动,系统的负载存在扰动,这些因素都增加了控制器设计的难度;另外,电液伺服系统中还存在着伺服阀控制信号的输入饱和问题,这不仅影响系统的动态品质,降低系统的控制性能,甚至会造成系统不稳定。
关于电液伺服位置系统的基础理论研究可分成如下两个方面:一是对称缸电液伺服系统的位置跟踪控制。文献[4]利用反馈线性化理论实现了电液伺服系统的线性化,并在此基础上设计了位置跟踪反步控制器,然而该控制器设计方法假设系统模型是精确已知的,而没有考虑系统参数的摄动问题;文献[5]针对电液伺服系统中存在的不确定参数,利用回归最小二乘法对其进行在线估计,并基于输出的估计值完成了间接自适应反步控制器的设计,然而该控制器设计方法未考虑伺服阀控制信号存在的输入饱和问题;文献[6]考虑电液伺服系统中伺服阀存在的控制输入饱和问题,提出了一种具有 增益的鲁棒抗饱和多模型切换控制策略,保证了在输入受限情况下电液伺服系统的稳定性。二是非对称缸电液伺服系统的位置跟踪控制。针对非对称缸电液伺服系统中存在的参数摄动和外部扰动等问题,文献[7]首先将电液伺服位置系统的非线性模型线性化,而后完成了 鲁棒控制器的设计,该控制器设计方法简化了控制器的设计过程,提高了系统的抗干扰能力;文献[8]提出了一种基于积分型Lyapunov函数的自适应反步控制方法,并在搭建的AMESim与MATLAB联合仿真平台上验证了所提算法的有效性;文献[9]对含有确定、不确定,已知、未知,线性和非线性项的电液伺服系统进行了建模,并提出了一种自适应鲁棒控制器设计方法,使得系统的所有状态在任意给定条件下都能收敛到理想状态。然而文献[7-9]中的控制器设计方法均未充分考虑伺服阀控制信号存在的输入饱和问题,以及控制器推导设计过程中存在的“计算膨胀”問题。
考慮到反步法[10]是一种简单、有效的控制器设计方法,尤其是针对具有严格反馈形式的非线性系统。然而在反步控制器的推导过程中需要对虚拟控制量重复微分,若系统的阶次较高,则会使控制器的复杂性随着系统阶次的增加呈爆炸式增长,即出现“计算膨胀”问题。而动态面控制方法[11]通过构造低通滤波器对反步控制中每一步的虚拟控制量进行估计,可有效解决反步控制中的“计算膨胀”问题,并简化控制器的设计过程。此外,模糊干扰观测器[12]可对系统的干扰不确定项进行观测估计,且无需对其做任何限制,因而降低了控制器设计的保守性。
基于上述分析,本文采用模糊干扰观测器和自适应动态面反步控制方法,研究具有输入饱和的非对称缸电液伺服系统的位置跟踪控制问题。首先,将系统模型等价转化为严格的反馈形式,以便于系统控制器的设计,同时考虑电液伺服阀由于阀门开度有限而存在的输入饱和问题,以确保系统的控制性能和动态品质;其次,通过构造模糊干扰观测器对由系统参数摄动、负载扰动和超出控制输入限幅部分构成的复合干扰进行观测估计,并将输出的观测值引入到而后设计的控制器中进行补偿,以提高系统的跟踪控制精度;再次,将反步控制与动态面控制相结合完成非对称缸电液伺服位置系统控制器的设计,以增强系统的抗干扰性能,简化系统控制器的设计过程,并解决反步控制中的“计算膨胀”问题。最后,以某650 mm冷带轧机电液伺服位置系统为例进行仿真研究,并同未采用模糊干扰观测器的反步控制方法及常规的PI控制方法相比较,验证本文所提方法能够有效削弱输入饱和对系统性能的影响,并具有较好的动态性能和稳态精度。
1 电液伺服位置系统的数学模型及控制问题提出
1.1 电液伺服位置系统的数学模型
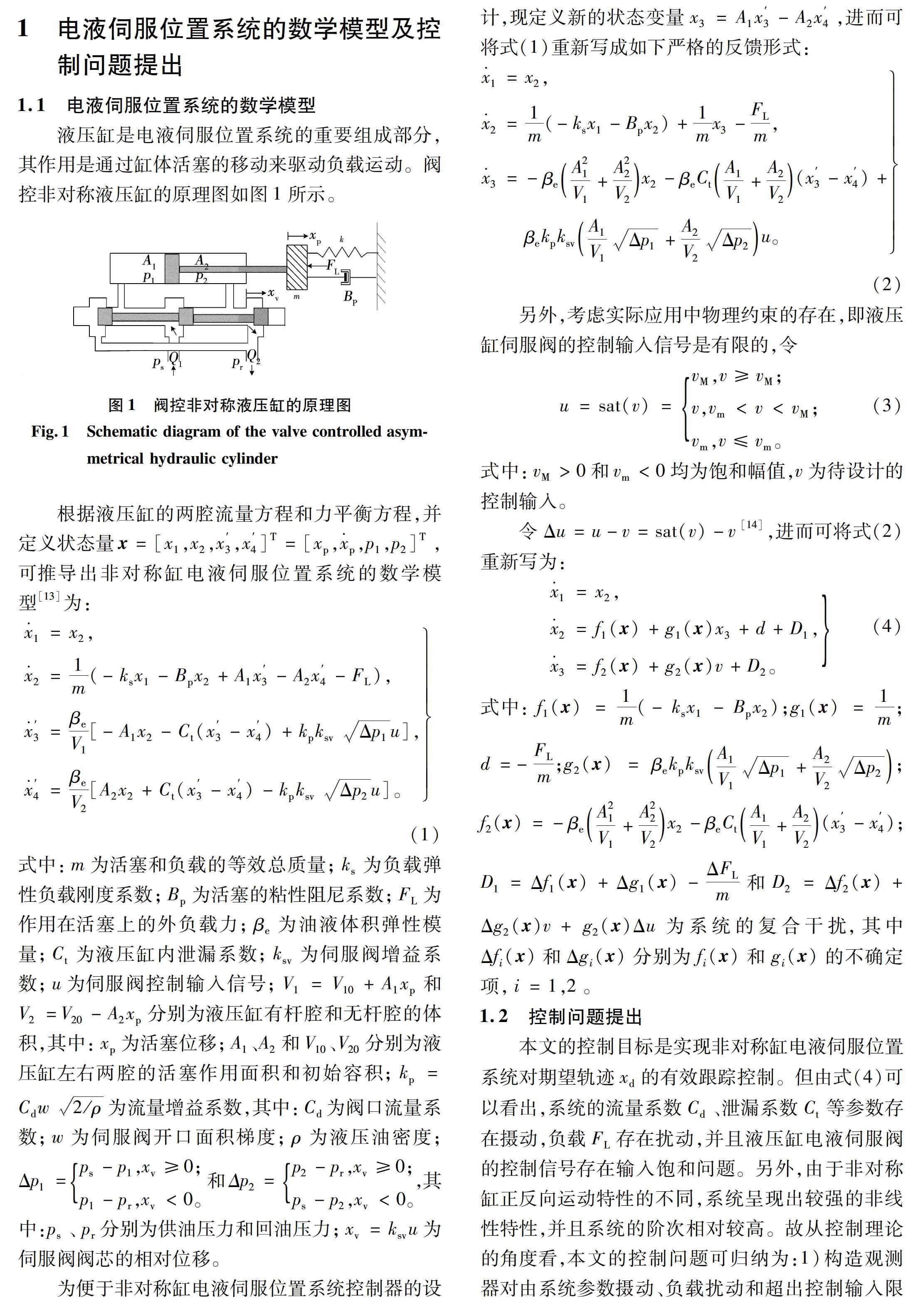
液压缸是电液伺服位置系统的重要组成部分,其作用是通过缸体活塞的移动来驱动负载运动。阀控非对称液压缸的原理图如图1所示。
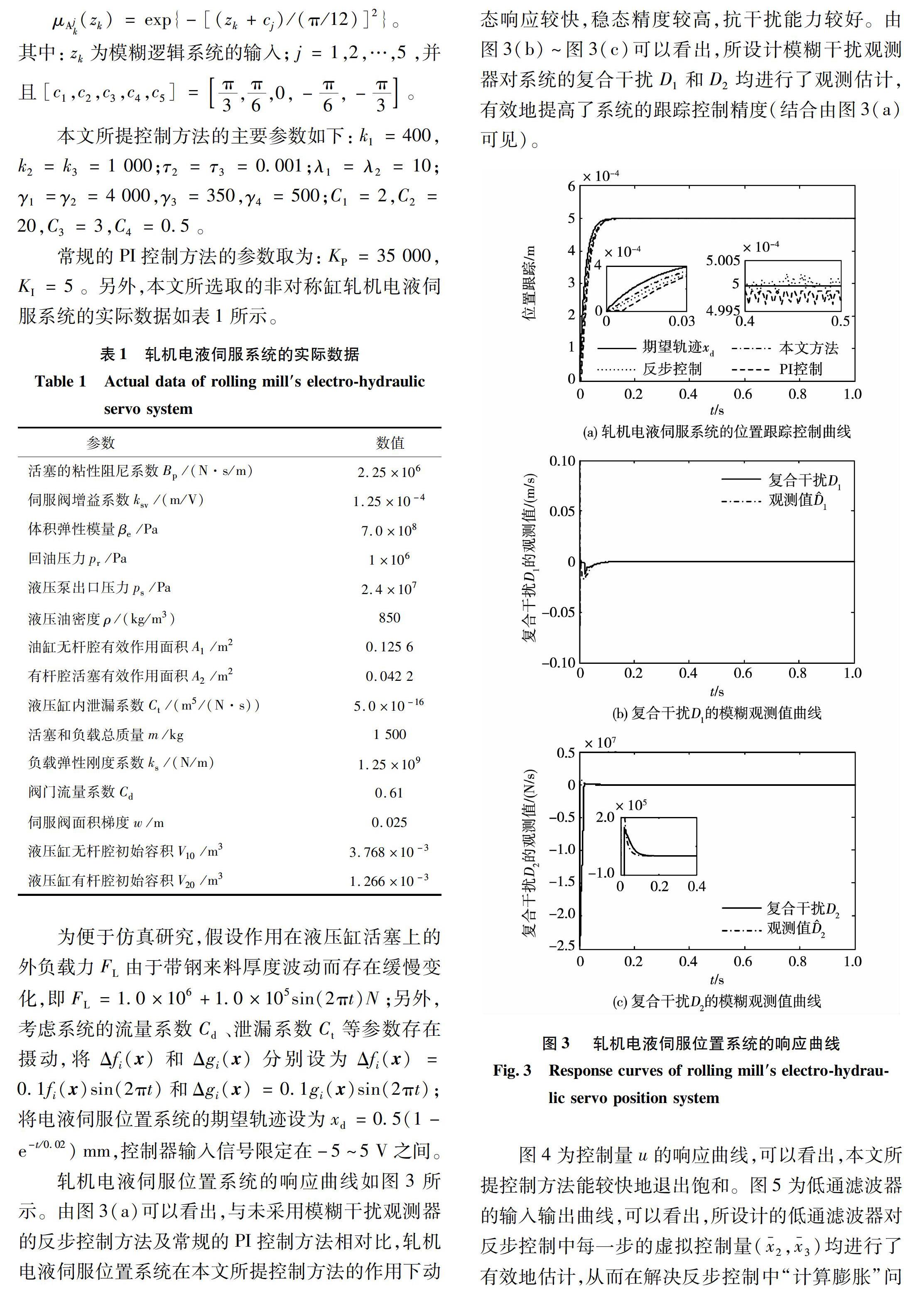
轧机电液伺服位置系统的响应曲线如图3所示。由图3(a)可以看出:与未采用模糊干扰观测器的反步控制方法及常规的PI控制方法相对比,轧机电液伺服位置系统在本文所提控制方法的作用下动态响应较快,稳态精度较高,抗干扰能力较好。由图3(b)-3(c)可以看出:所设计模糊干扰观测器对系统的复合干扰 和 均进行了观测估计,有效地提高了系统的跟踪控制精度(结合由图3(a)可见)。
图4为控制量u的响应曲线,可以看出:本文所提控制方法能较快地退出饱和。图5为低通滤波器的输入输出曲线,可以看出:所设计的低通滤波器对反步控制中每一步的虚拟控制量 均进行了有效地估计,从而在解决反步控制中“计算膨胀”问题的同时,简化了控制器的设计过程。
5 结论
本文基于模糊干扰观测器和自适应动态面反步控制方法研究了具有输入饱和的非对称缸电液伺服系统的位置跟踪控制问题。首先,将系统模型等价转化为严格的反馈形式,并考虑了在实际应用中伺服阀控制信号存在的输入饱和问题,在方便设计系统控制器的同时,确保系统的控制性能;其次,通过构造的模糊干扰观测器对系统中由摄动参数、负载扰动和超出控制输入限幅部分构成的复合干扰进行了观测估计,并将输出的观测值引入到而后设计的控制器中进行补偿,有效地提高了系统的跟踪控制精度;再次,将反步控制与动态面控制相结合完成非对称缸电液伺服位置系统控制器的设计,该控制器的抗干扰能力较强,控制参数易于整定,有效地解决了反步控制中的“计算膨胀”问题,并简化了控制器的设计过程;通过理论分析证明了本文所提方法能够保证闭环系统的所有信号是一致最终有界的。最后,基于某650 mm冷带轧机电液伺服系统的实际数据,将本文所提方法同未采用模糊干扰观测器的反步控制方法及常规的PI控制方法进行了仿真对比研究,仿真结果表明:非对称缸轧机电液伺服位置系统在本文所提方法的作用下,不但对期望的位置信号进行了有效地跟踪控制,削弱了输入饱和对系统性能的影响,而且具有较好的动态性能和稳态精度。
参考文献:
[1] 邵璇, 张永德, 孙桂涛, 等. 液压机器人关节力补偿控制研究[J]. 电机与控制学报, 2018, 22(9): 98-103.
SHAO Xuan, ZHANG Yongde, SUN Guitao, et al. Hydraulic robot joint force compensation control [J]. Electric Machines and Control, 2018, 22(9): 98-103.
[2] 孙浩, 高强, 刘国栋, 等. 某同源平衡及定位电液伺服系统模糊分数阶PID控制[J]. 火力与指挥控制, 2017, 42(7): 61-65, 71.
SUN Hao, GAO Qiang, LIU Guodong, et al. A homologous balance and positioning servo system of fuzzy fractional order PID control [J]. Fire Control & Command Control, 2017, 42(7): 61-65, 71.
[3] 左希庆, 阮健, 孙坚, 等. 基于挤压油膜理论的二维电液压力伺服阀稳定性分析[J]. 中国机械工程, 2017, 28(5): 537-543.
ZUO Xiqing, RUAN Jian, SUN Jian, et al. Stability analysis of 2D electro-hydraulic pressure servo valve based on squeeze film theory [J]. China Mechanical Engineering, 2017, 28 (5): 537-543.
[4] Ursu L, Toader A, Halanay A, et al. New stabilization and tracking control laws for electro-hydraulic servomechanism [J]. European Journal of Control, 2013, 19(1): 65-80.
[5] Kaddissi C, Kenne J, Saad M. Indirect adaptive control of an electro-hydraulic servo system based on nonlinear backstepping [J]. IEEE Transactions on Mechatronics, 2011, 16(6): 1171-1177.
[6] 王志杰, 方一鳴, 李叶红, 等. 输入受限的轧机液压伺服系统多模型切换控制[J]. 仪器仪表学报, 2013, 34(4): 881-888.
WANG Zhijie, FANG Yiming, LI Yehong, et al. Multi-model switching control for rolling mill hydraulic servo system with input constrains [J]. Chinese Journal of Scientific Instrument. 2013, 34 (4): 881-888.
[7] Milic V, Situm Z, Essert M. Robust position control synthesis of an electro-hydraulic servo system [J]. ISA Transactions, 2010, 49(4): 535-542.
[8] 林浩, 李恩, 梁自泽. 具有非线性不确定参数的电液伺服系统自适应backstepping控制[J]. 控制理论与应用, 2016, 33(2): 181-188.
LIN Hao, LI En, LIANG Zize. Adaptive backstepping controller for electro-hydraulic servo system with nonlinear uncertain parameters [J]. Control Theory & Applications, 2016, 33(2): 181-188.
[9] 陈光荣, 王军政, 汪首坤, 等. 自适应鲁棒控制器设计新方法在电液伺服系统中的应用[J]. 自动化学报, 2016, 42(3): 375-384.
CHEN Guangrong, WANG Junzheng, WANG Shoukun, et al. Application of a new adaptive robust controller design method to electro-hydraulic servo system [J]. Acta Automatica Sinica, 2016, 42(3): 375-384.
[10] 刘乐, 李智, 方一鸣, 等.伺服电机驱动连铸结晶器振动位移系统滑模控制[J]. 电机与控制学报, 2016, 20(12): 101-108.
LIU Le, LI Zhi, FANG Yiming, et al. Sliding-mode control of continuous cast mold oscillation displacement system driven by servo motor [J]. Electric Machines and Control, 2016, 20(12): 101-108.
[11] 朱齐丹, 马俊达, 刘可.基于扰动观测器的无人水面船鲁棒轨迹跟踪[J]. 电机与控制学报, 2016, 20(12): 65-73.
ZHU Qidan, MA Junda, LIU Ke. A nonlinear disturbance observer based on robust approach to the trajectory tracking of an unmanned surface vehicle [J]. Electric Machines and Control, 2016, 20(12): 65-73.
[12] Kang H S, Lee Y, Hyun C H, et al. Design of sliding-mode control based on fuzzy disturbance observer for minimization of switching gain and chattering [J]. Soft Computing, 2015, 19(4): 851-858.
[13] 方一鸣, 许衍泽, 李建雄. 具有输入饱和的电液伺服位置系统自适应动态面控制[J]. 控制理论与应用, 2014, 31(4): 511-518.
FANG Yiming, Xu Yanze, LI Jiangxiong. Adaptive dynamic surface control for electro-hydraulic servo position system with input saturation [J]. Control Theory & Applications, 2014, 31(4): 511-518.
[14] Lu K F, Xia Y Q, Fu M Y. Controller design for rigid spacecraft attitude tracking with actuator saturation [J]. Information Sciences, 2013, (220): 343-366.
[15] Chen M, Chen W H, Wu Q X. Adaptive fuzzy tracking control for a class of uncertain MIMO nonlinear systems using disturbance observer [J]. Science China Information Sciences, 2014, 57(1): 1-13.